功能介绍
PoissonRecon(泊松表面重建):通过“Plugins -> PossionRecon”运行
Reference:https://github.com/mkazhdan/PoissonRecon
前提:
(1)点云需要具有法线,如果没有,可以先生成再计算
(2)点云的法线方向正确、一致
具体操作
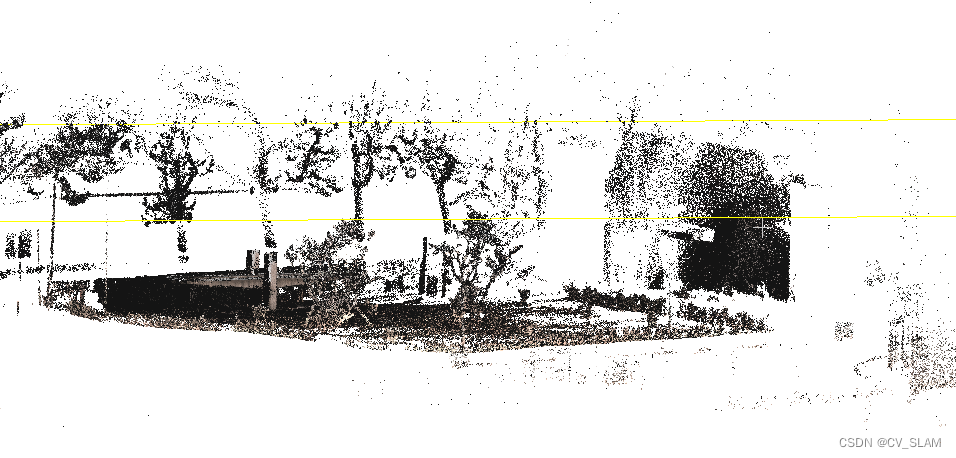
选择点云,并进行预处理;
使用PoissonRecon
(1)通过设定Octree级别,进行poisson surface reconstruction
Octree depth 越大,效果越好,对应的计算时间和运行内存越大
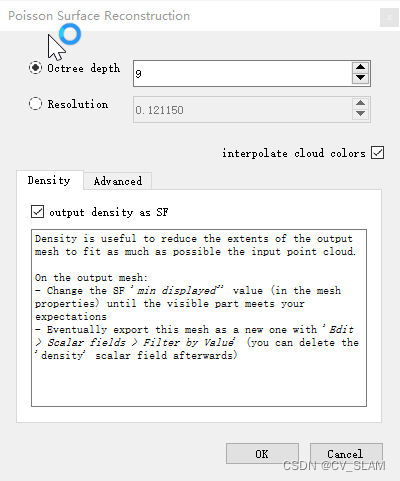
(2)通过SF调整,进行筛选,直到获取满意的效果
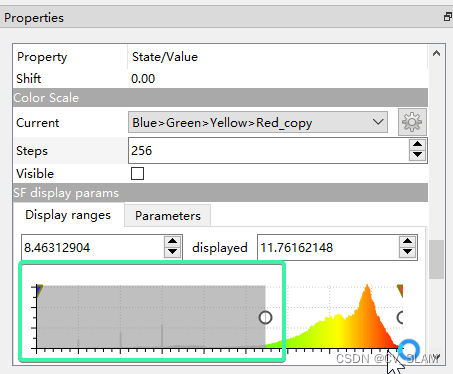
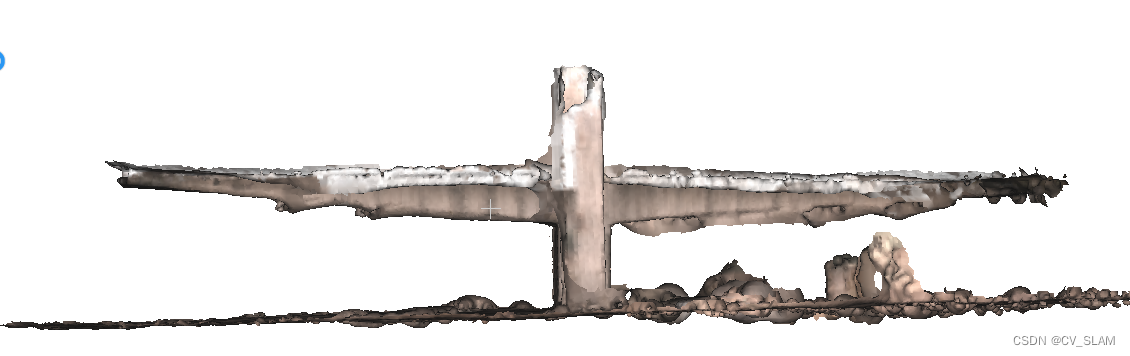
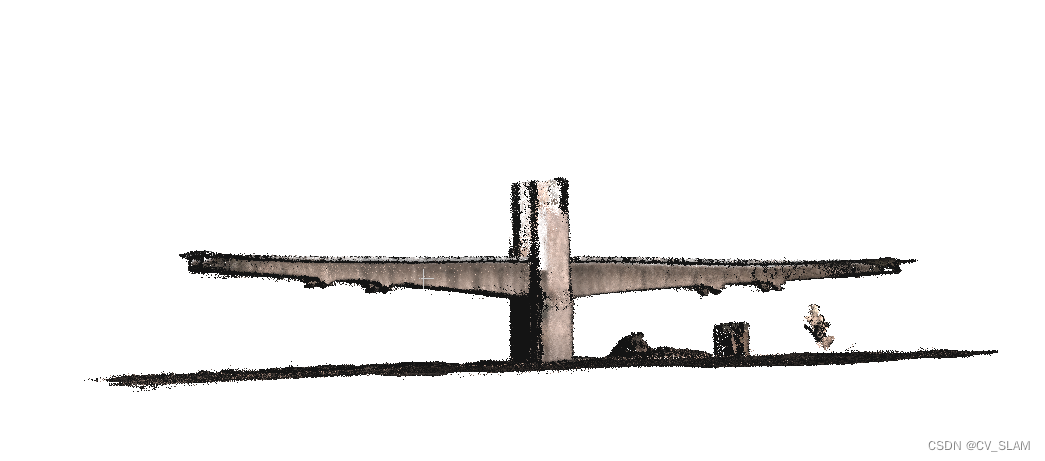
(3)效果展示
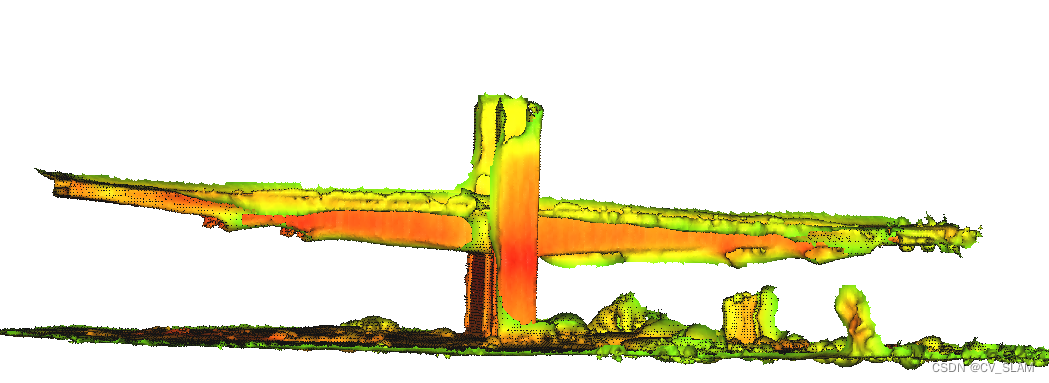
RGB: