功能介绍
Label Connected Components工具可以通过“Tools > Segmentation > Label Connected Comp”菜单进行打开;
Label Connected Components工具基于连通性原理将选定的点云进行分组,并基于分组结果以最小距离分割为独立的点云簇;
Label Connected Components工具的源于经典的图像处理方法(参见http://en.wikipedia.org/wiki/Connected-component_labeling)
例如:https://iq.opengenus.org/connected-component-labeling/
具体操作
选择点云,并启动工具;
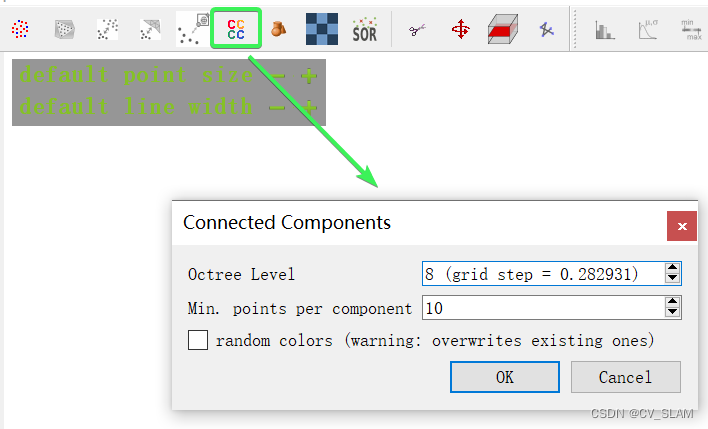
相关参数
(1)Octree Level(八叉树级别):CloudCompare 使用 3D 网格来提取连接的点云组,grid step是通过八叉树结构推导出来(一个八叉树单元在给定细分水平上的长度)。通过选择八叉树级别,可以定义两个点云之间的最小距离(即括号内的显示的八叉树的一个单元长度,可以代表细分程度);八叉树的级别越高,对应的间距也就越小、后续的点云聚类数目也就越多。
(2)分割后每组点云的最少点云数目:定义每组的最小点云数目,小于该数目的点云聚类将会被删除(可以用于去噪)。
(3)随机颜色(单选框):是否需要给点云重新赋色(如果选中将强制赋色,一般不选)
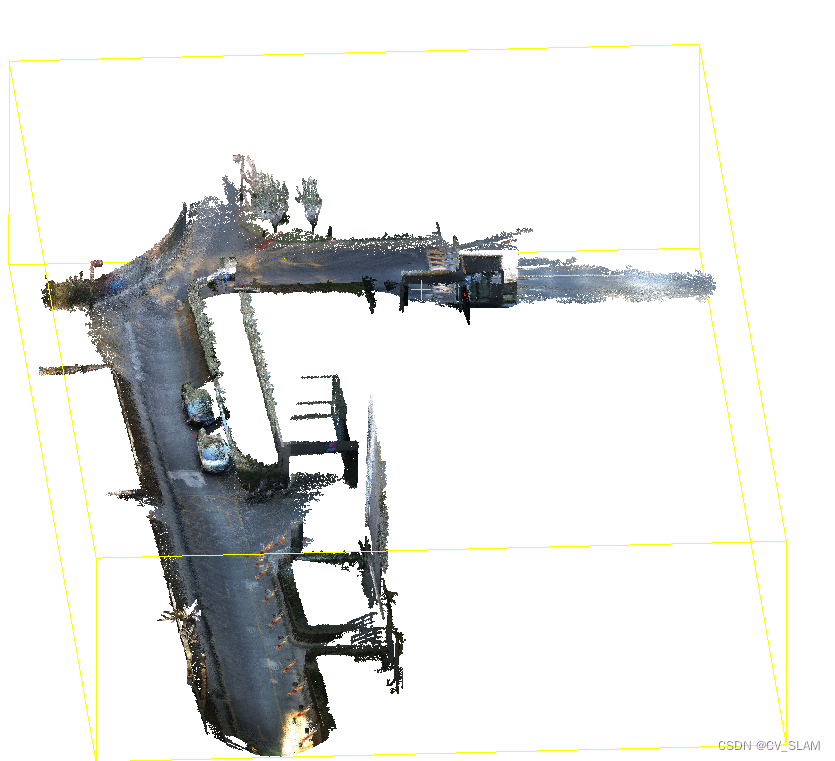
点击“ok”,系统将会基于Octree Level级别,结合连通性进行点云分组。每个点云聚类都是原始点云的子集,具有相同的特征(标量场、法线、颜色)。
(4)分割后的点云会基于点云数目按从大到小进行重新排序
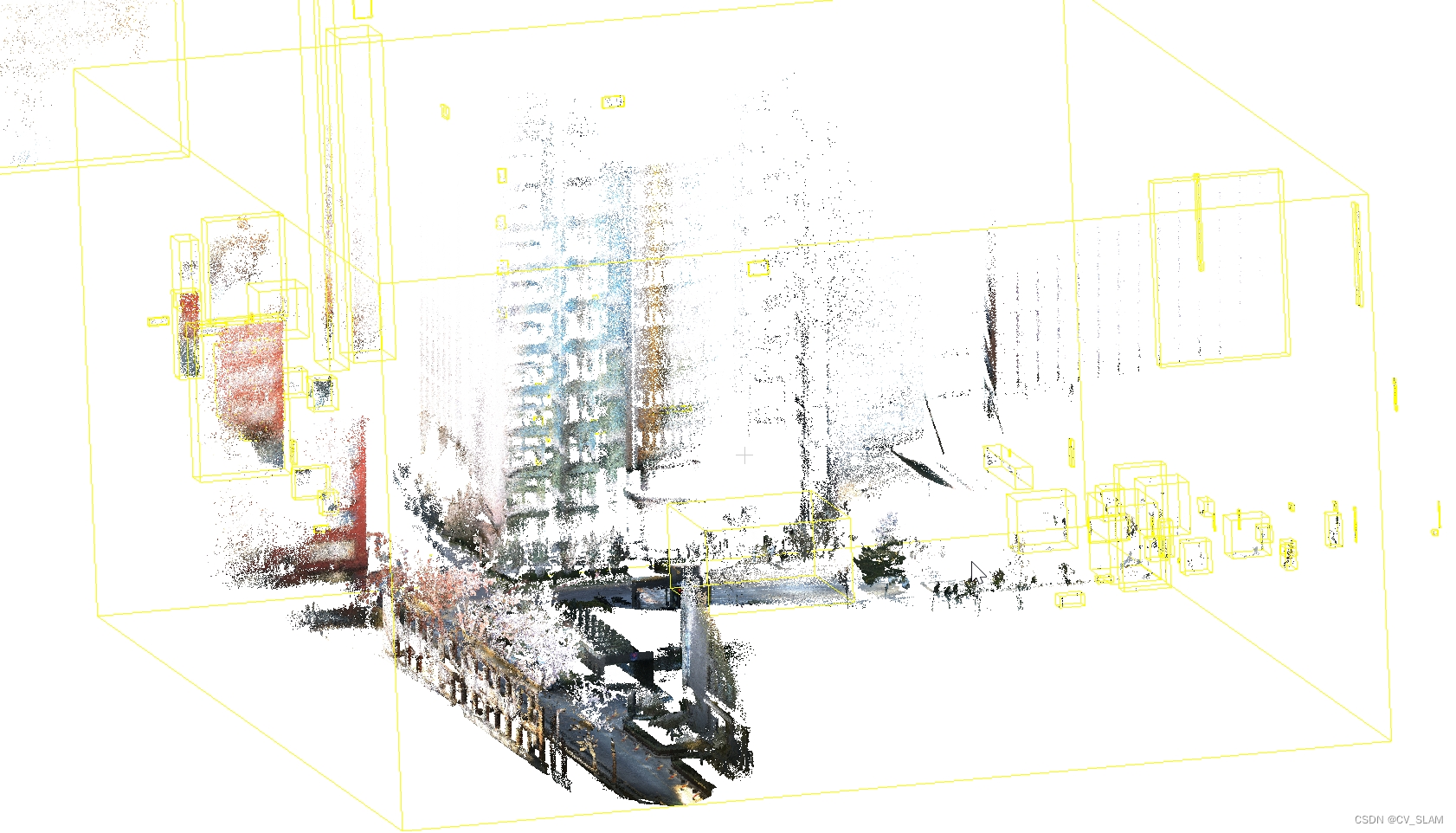
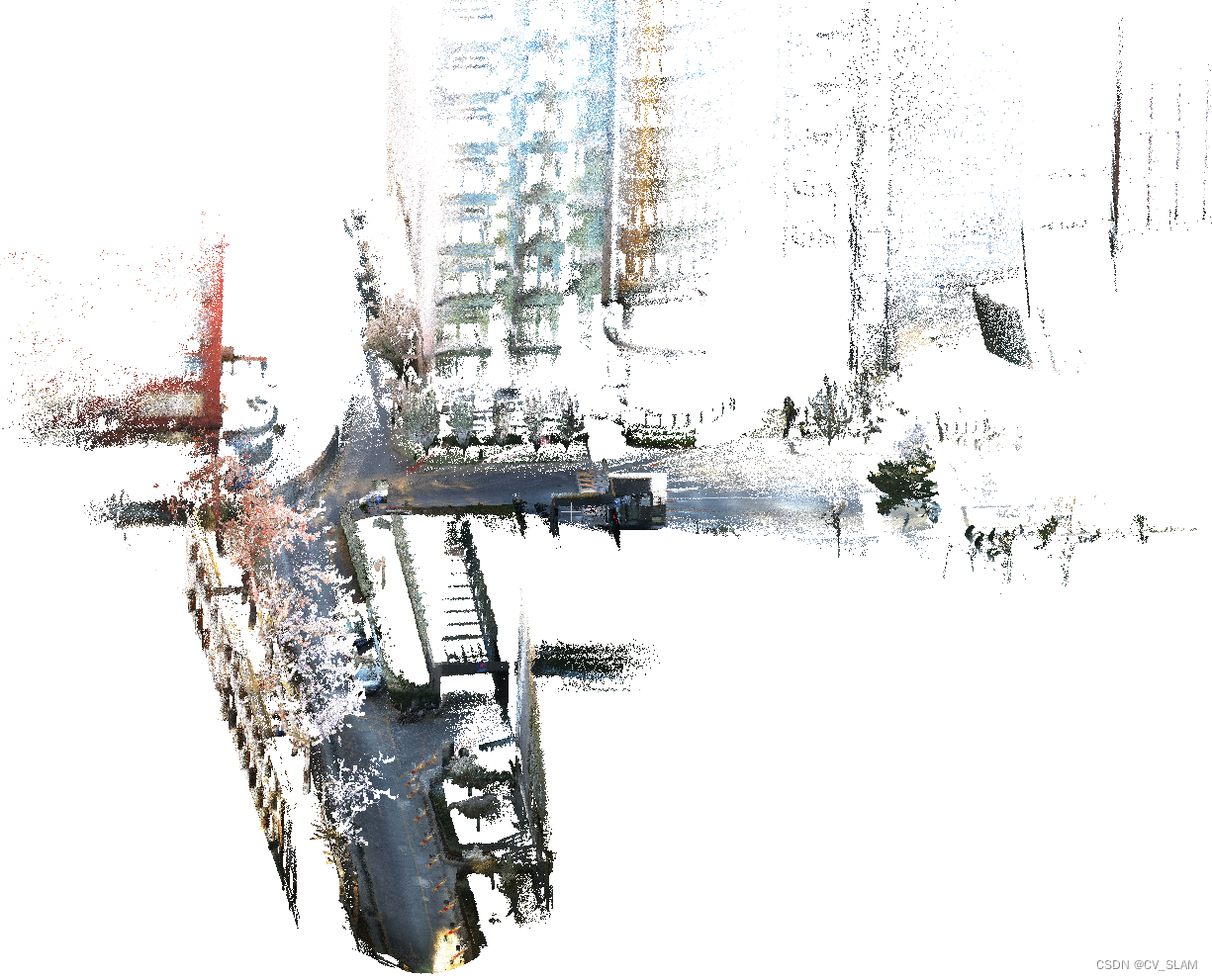
数据测试


拓展
(1)工具的实际参数?
- 要标记的点云
- 八叉树的细分级别(介于1和MAX_OCTREE_LEVEL)
- 进程(可以在客户端看到处理过程的提示信息)
(2)八叉树的单元长度(grid step)是如何计算的呢?
如果给定的八叉树级别为‘n’,那么单元的大小将等于点云的边界盒的最大长度除以2^n,级别 "n "越大,单元大小就越小,整个处理过程会产生更多的独立点云聚类