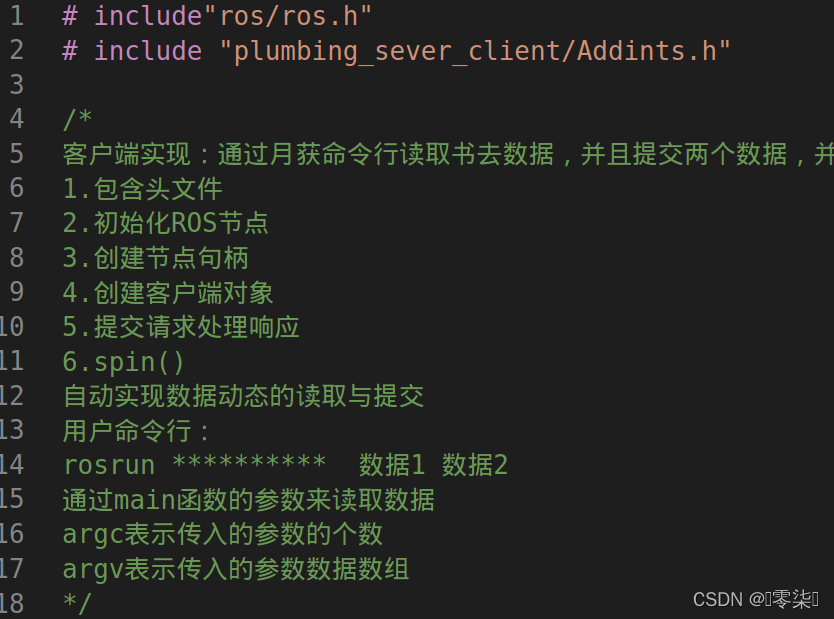
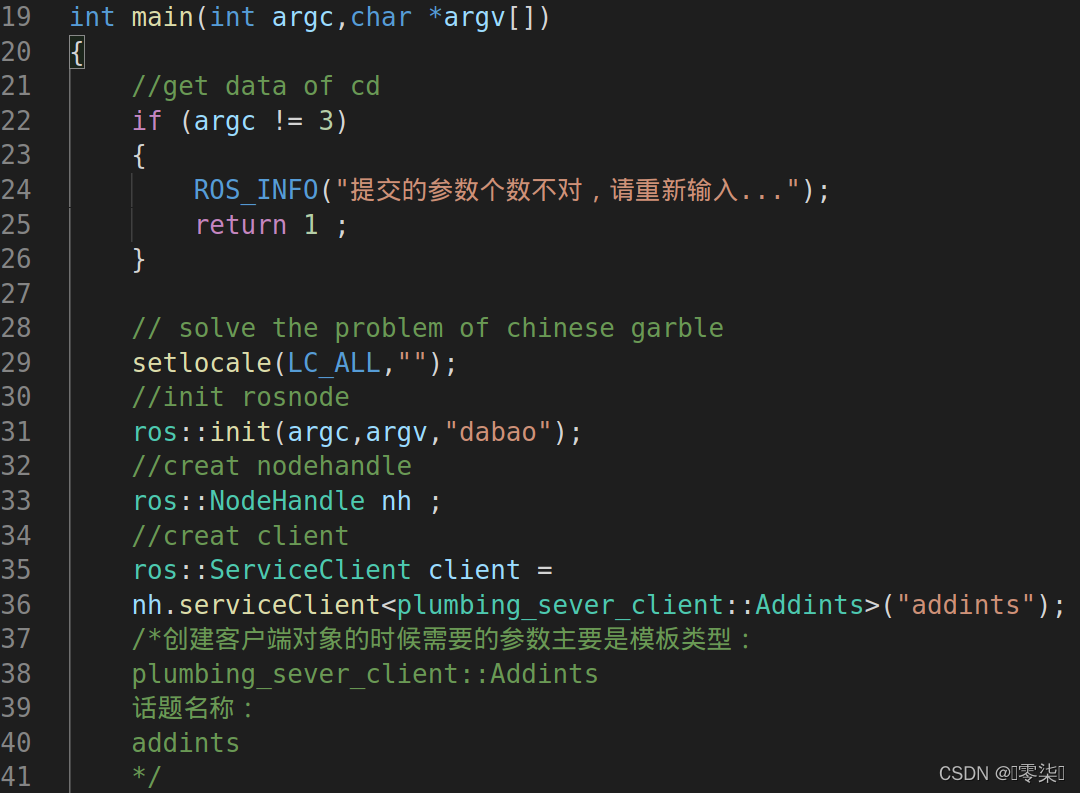
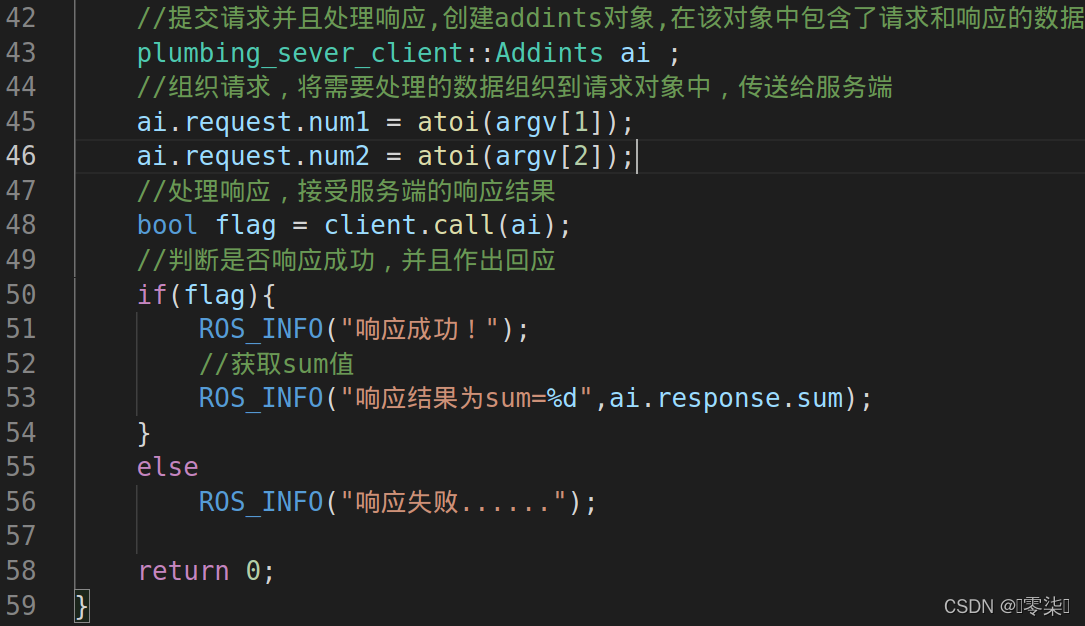
ROS学习 服务通信自定义消息类型 客户端实现





猜你喜欢
转载自blog.csdn.net/qq_52111026/article/details/122492573
今日推荐
周排行