(一)发布器与订阅器
发布节点
#include "ros/ros.h"
#include "std_msgs/String.h"
#include <sstream>
int main(int argc, char **argv)
{
ros::init(argc, argv, "talker");
ros::NodeHandle n;
ros::Publisher chatter_pub = n.advertise<std_msgs::String>("chatter", 1000);
ros::Rate loop_rate(10);
int count = 0;
while (ros::ok())
{
std_msgs::String msg;
std::stringstream ss;
ss << "hello world " << count;
//String数据类型可以看做一个类
//msg.data为类的成员变量
msg.data = ss.str();
ROS_INFO("%s", msg.data.c_str());
//参数必须与定义时的chatter_pub参数列表一样
chatter_pub.publish(msg);
ros::spinOnce();
loop_rate.sleep();
++count;
}
return 0;
}
订阅节点
#include "ros/ros.h"
#include "std_msgs/String.h"
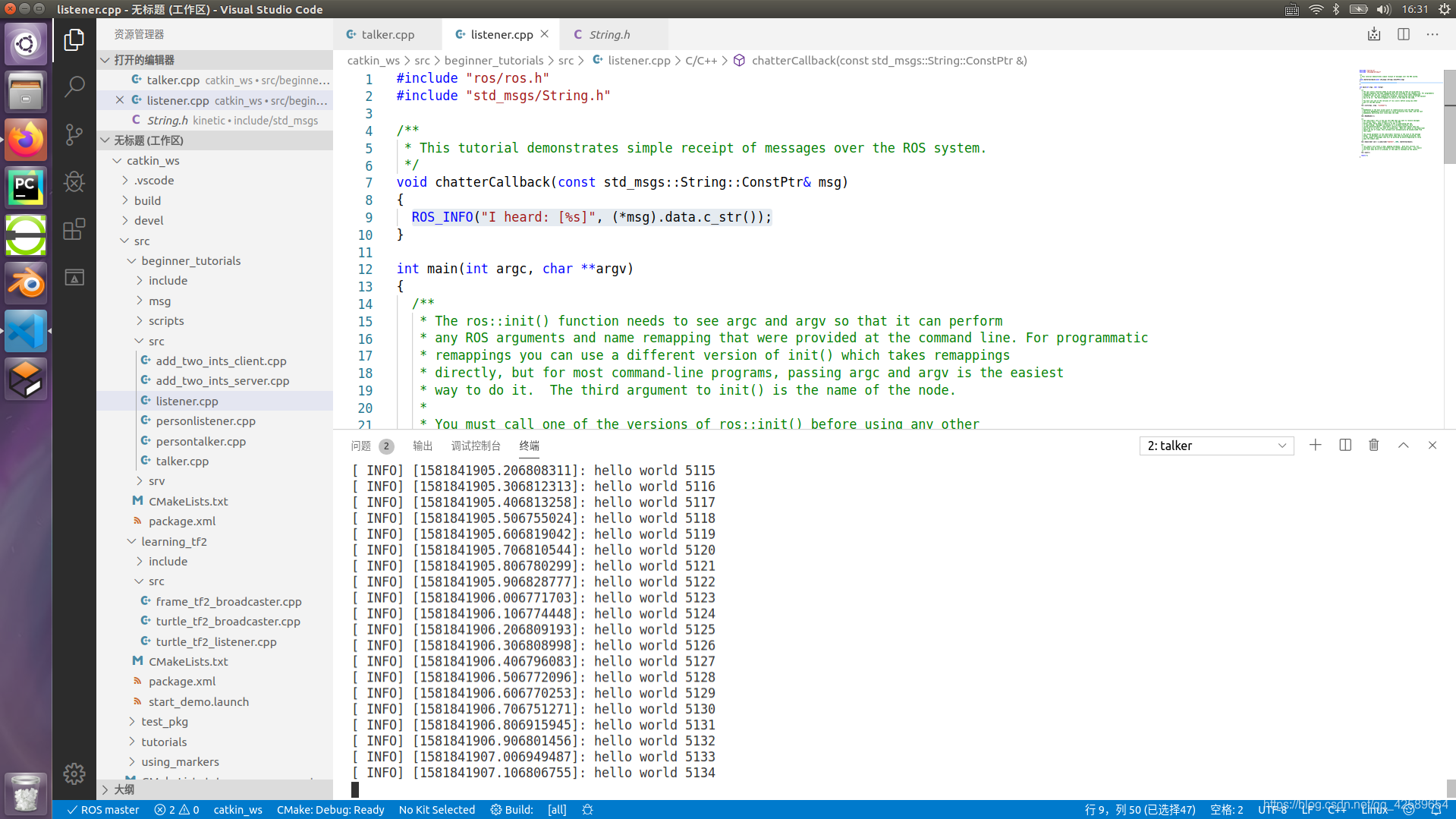
void chatterCallback(const std_msgs::String::ConstPtr& msg)
{
//返回类型是个指针,所以可以有两种调用方式,下一行注释亲测可用
//ROS_INFO("I heard: [%s]", (*msg).data.c_str());
ROS_INFO("I heard: [%s]", msg->data.c_str());
}
int main(int argc, char **argv)
{
//初始化节点并为节点起个名
ros::init(argc, argv, "listener");
//句柄,与ros系统交流
ros::NodeHandle n;
//订阅消息,在接受到消息之后调用chatterCallback函数
ros::Subscriber sub = n.subscribe("chatter", 1000, chatterCallback);
//循环
ros::spin();
return 0;
}
结果
(二)客户端和服务器

客户端
add_two_ints_client
#include "ros/ros.h"
#include "beginner_tutorials/AddTwoInts.h"
#include <cstdlib>
int main(int argc, char **argv)
{
ros::init(argc, argv, "add_two_ints_client");
if (argc != 3)
{
ROS_INFO("usage: add_two_ints_client X Y");
return 1;
}
ros::NodeHandle n;
ros::ServiceClient client = n.serviceClient<beginner_tutorials::AddTwoInts>("add_two_ints");
beginner_tutorials::AddTwoInts srv;
srv.request.a = atoll(argv[1]);
srv.request.b = atoll(argv[2]);
if (client.call(srv))
{
ROS_INFO("Sum: %ld", (long int)srv.response.sum);
}
else
{
ROS_ERROR("Failed to call service add_two_ints");
return 1;
}
return 0;
}
服务器
add_two_ints_server
#include "ros/ros.h"
#include "beginner_tutorials/AddTwoInts.h"
bool add(beginner_tutorials::AddTwoInts::Request &req,
beginner_tutorials::AddTwoInts::Response &res)
{
res.sum = req.a + req.b;
ROS_INFO("request: x=%ld, y=%ld", (long int)req.a, (long int)req.b);
ROS_INFO("sending back response: [%ld]", (long int)res.sum);
return true;
}
int main(int argc, char **argv)
{
ros::init(argc, argv, "add_two_ints_server");
ros::NodeHandle n;
ros::ServiceServer service = n.advertiseService("add_two_ints", add);
ROS_INFO("Ready to add two ints.");
ros::spin();
return 0;
}
结果
lv@lv-HP:~/catkin_ws$ roscore
lv@lv-HP:~/catkin_ws$ rosrun beginner_tutorials add_two_ints_client
[ INFO] [1581842363.085734434]: usage: add_two_ints_client X Y
lv@lv-HP:~/catkin_ws$ rosrun beginner_tutorials add_two_ints_client 50 60
[ INFO] [1581842420.012682340]: Sum: 110
lv@lv-HP:~/catkin_ws$ rosrun beginner_tutorials add_two_ints_server 20 50
[ INFO] [1581842345.054387632]: Ready to add two ints.
[ INFO] [1581842420.012588996]: request: x=50, y=60
[ INFO] [1581842420.012608778]: sending back response: [110]
