客户端 Client 的编程实现
1、模型

2、编程实现
步骤一:创建新的功能包
回到/catkin_ws/src文件夹下,创建一个新的功能包,名为learning_service:
catkin_create_pkg learning_service roscpp rospy std_msgs turtlesim geometry_msgs
步骤二:编写 cpp 代码
在/catkin_ws/src/learning_service/src/目录下新建turtle_spawn.cpp文件,把以下代码复制进去:
/**
* 该例程将请求/spawn服务,服务数据类型turtlesim::Spawn
*/
#include <ros/ros.h>
#include <turtlesim/Spawn.h>
int main(int argc, char** argv)
{
// 初始化ROS节点
ros::init(argc, argv, "turtle_spawn");
// 创建节点句柄
ros::NodeHandle node;
// 发现/spawn服务后,创建一个服务客户端,连接名为/spawn的service
ros::service::waitForService("/spawn");
ros::ServiceClient add_turtle = node.serviceClient<turtlesim::Spawn>("/spawn");
// 初始化turtlesim::Spawn的请求数据
turtlesim::Spawn srv;
srv.request.x = 2.0;
srv.request.y = 2.0;
srv.request.name = "turtle2";
// 请求服务调用
ROS_INFO("Call service to spwan turtle[x:%0.6f, y:%0.6f, name:%s]",
srv.request.x, srv.request.y, srv.request.name.c_str());
add_turtle.call(srv);
// 显示服务调用结果
ROS_INFO("Spwan turtle successfully [name:%s]", srv.response.name.c_str());
return 0;
};
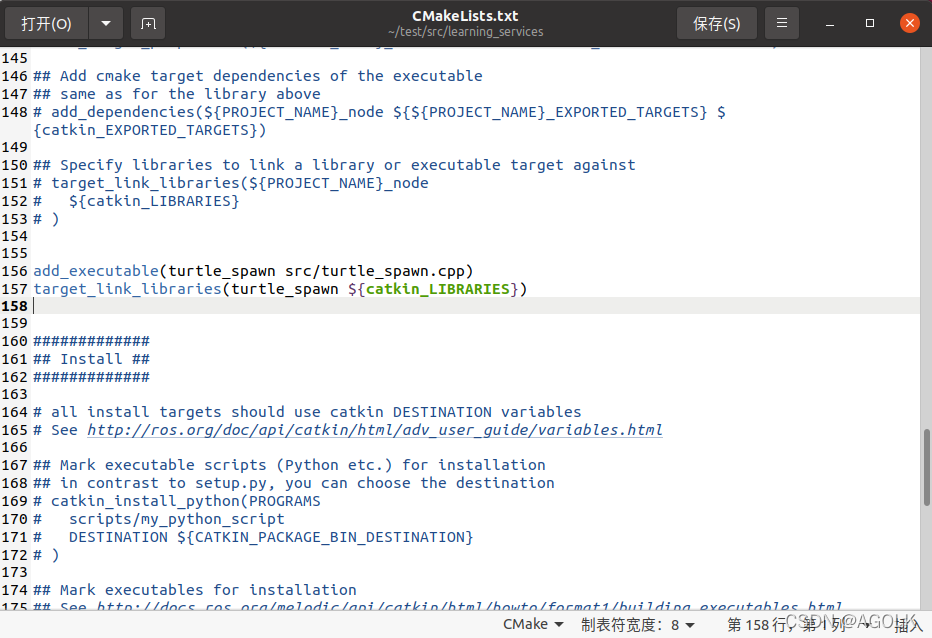
步骤三:配置 CMakeLists.txt 的编译规则
与之前一样,需要配置 CMakeLists.txt 的编译规则:
add_executable(turtle_spawn src/turtle_spawn.cpp)
target_link_libraries(turtle_spawn ${
catkin_LIBRARIES})
步骤四:编译并运行
在catkin_ws文件夹下,输入catkin_make命令进行编译,在/catkin_ws/devel/lib/learning_service目录下可以看到turtle_spawn文件,说明编译成功。
roscore
rosrun turtlesim turtlesim_node
rosrun learning_service turtle_spawn
1、如果提示
[rospack] Error: package 'learning_service' not found意思是你没有修改环境变量,需要先输入source catkin_ws/devel/setup.bash命令后,在运行一次rosrun learning_service turtle_spawn命令。
2、如果已经修改过环境变量,并且可以找到功能包对应的可执行文件,然而执行rosrun命令时也无法自动补全功能包名称,这个时候执行一遍rospack list命令即可。
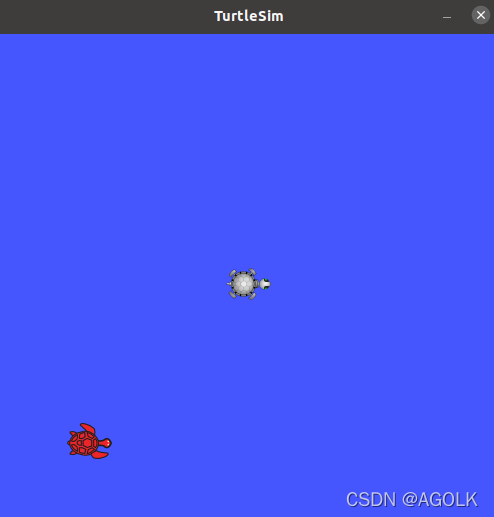
看到以下效果证明已经成功: