作者 | 德新

2023下半年,以华蔚小理为代表的智能驾驶头部厂商,其高阶辅助驾驶全面进城。
在过去短短一周时间里,蔚来、华为、理想、小鹏紧锣密鼓悉数公布了新进展。此外据HiEV了解,比亚迪、智己、飞凡等品牌的智驾团队也在加班加点,甚至部分开启了两班倒的路测,推进城市NOA。
为什么在这个时间点选择集体“进城”?原因已经非常清晰。
为什么在这个时间点选择集体“进城”?原因已经非常清晰。
城市NOA是提高用户辅助驾驶使用率的关键必经之路。
小鹏、理想等多家的数据显示,城市场景是车主行驶里程、行驶时长占比70 - 80%以上的场景。因此发力高阶智驾,必须解决城市场景,让用户在80%以上的核心场景用起来,而不是10% - 20%的「边缘」场景。 还有一则关联信息是,来自图商的消息源显示,特斯拉最快在今年下半年,最晚明年上半年将在国内测试FSD。
当下无疑是各大车企抢占用户心智,打造「最强智驾」的最佳时间窗口
。
城市NOA狂热推进背后,有几个明显的趋势:
去高精地图成行业共识;
AI大模型落地大幅提升感知能力;
激光雷达成为城市NOA标配。
一、城市NOA的突破:去高精地图,感知担子重了
城市场景的复杂性较高速场景有10倍 - 100倍的提升。
由于场景多元化,基于规则为主的算法框无法快速扩张,目前大部分公司的感知、规控正切换成数据驱动的模型算法。
另一方面,基于高精地图的成本、审核及更新周期的考虑,行业头部公司逐渐达成共识:实现城市NOA快速多城扩张,第一步要去掉高精地图。
去高精地图,加重了感知的担子,强化了感知的作用。
我们来看看几家厂商的做法:

华为ADS
蔚来NAD
小鹏XNGP
理想城市NOA
理想智能驾驶副总裁郎咸朋总结,城市NOA的进展,大幅受益于这两年AI大模型带来的先进成果。
去高精地图之后,
实时感知承担起了原本依靠高精地图的元素输入。而新近两年量产的车规级激光雷达,撑起了半边天。
二、城市NOA标配激光雷达,华蔚小理迪一致投票
利用AI大模型的强感知去高精地图是第一步,城市NOA还要面对各种不规则的动态目标(比如横向杀出的外卖小哥,甚至是掉落运动的轮胎)。
与特斯拉的纯视觉路线不同,以激光雷达作为感知融合的重要输入,是国内厂商目前最主要的方案。
 激光雷达具备几大明显的优势:
激光雷达具备几大明显的优势:
激光雷达具备几大明显的优势:
分辨率高,且不受光线影响
直接感知深度信息、无需训练
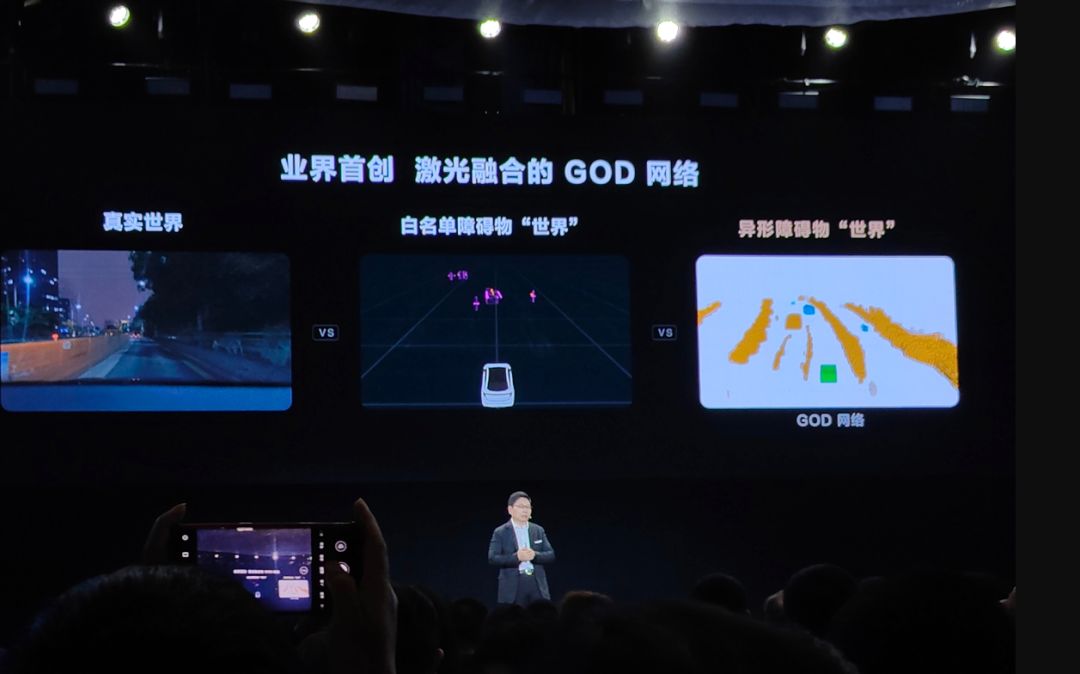
比如华为提出的GOD网络(通用障碍物检测网络),融合了激光雷达的输入,从而针对性解决了白名单之外障碍物的问题。
这也是为什么近期余承东敢喊出「我们超越了特斯拉」的原因。
与之类似,蔚来、理想等公司目前实现城市NOA也需要激光雷达的输入。
与之类似,蔚来、理想等公司目前实现城市NOA也需要激光雷达的输入。
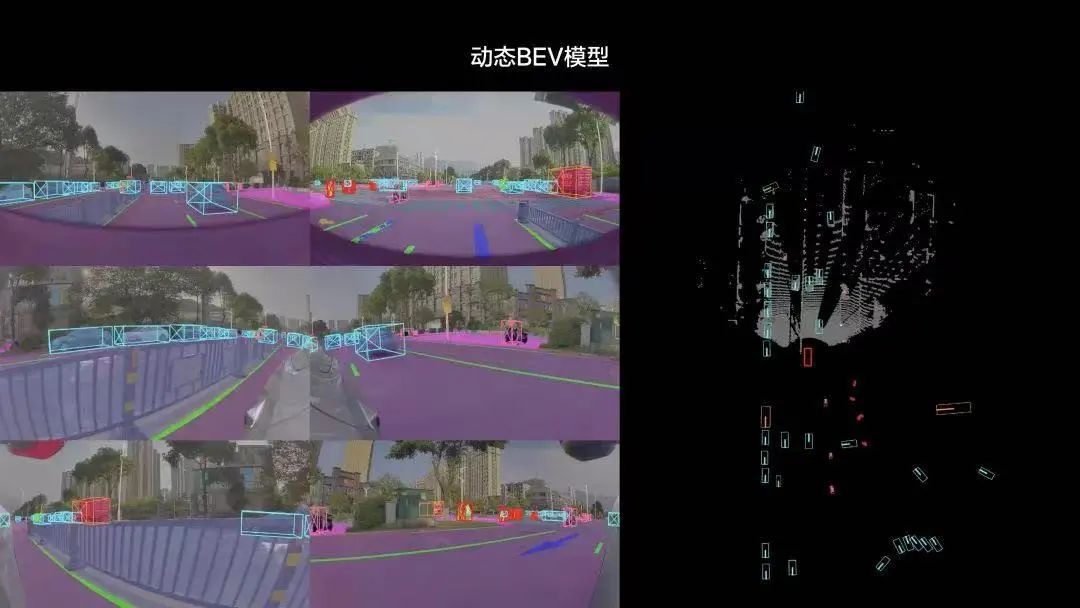
除了前述任少卿提到的在针对静态环境感知过程中,「激光雷达对元素感知的精度和稳定性较视觉高一个数量级」外,蔚来对外展示的Occupancy占据格栅网络也融合了激光雷达的信息。
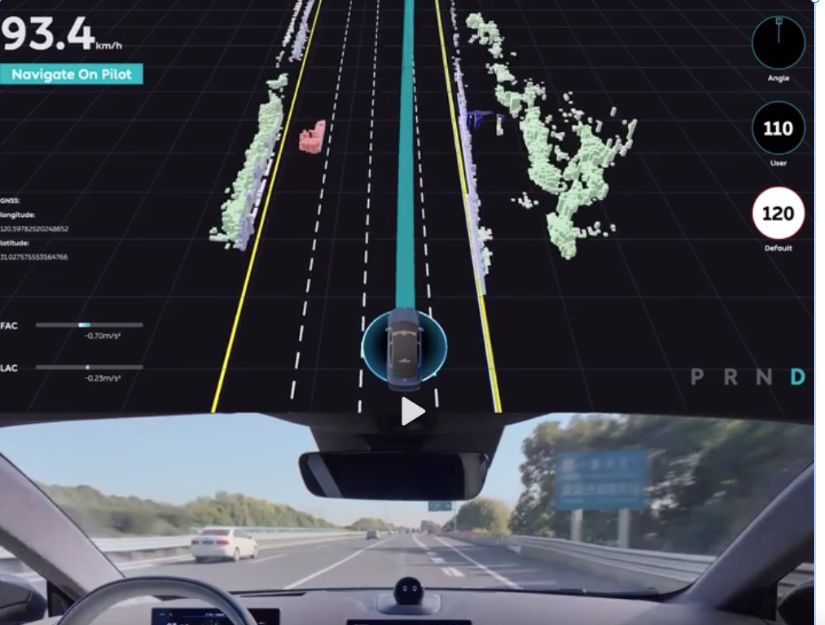
而上周末,在理想展示的城市NOA demo中,较为精彩的部分是大量的不规则的、异形障碍物/车辆的识别和应对,比如施工路段、卡车后斗、遗撒物品等等,无疑也是融合了激光雷达高精感知的结果。
而上周末,在理想展示的城市NOA demo中,较为精彩的部分是大量的不规则的、异形障碍物/车辆的识别和应对,比如施工路段、卡车后斗、遗撒物品等等,无疑也是融合了激光雷达高精感知的结果。
理想的智能驾驶副总裁朗咸朋,曾经在采访时表示:「激光雷达对安全性作用巨大」。

今年随着BEV感知等技术大热落地,视觉感知确实得到了长足发展,但目前华为、蔚来、小鹏、理想、比亚迪在传感器选择上仍投出一致票:
今年随着BEV感知等技术大热落地,视觉感知确实得到了长足发展,但目前华为、蔚来、小鹏、理想、比亚迪在传感器选择上仍投出一致票:
华为支持的,阿维塔/极狐/问界智驾版均搭载激光雷达实现城市NOA功能;
蔚来二代平台全系标配激光雷达;
小鹏G9/P7i/G6 MAX版,搭载激光雷达,支持城市NOA;
理想L系列MAX版标配激光雷达,支持城市NOA;
比亚迪仰望U8以及腾势N7,搭载三/双激光雷达,支持城市NOA。
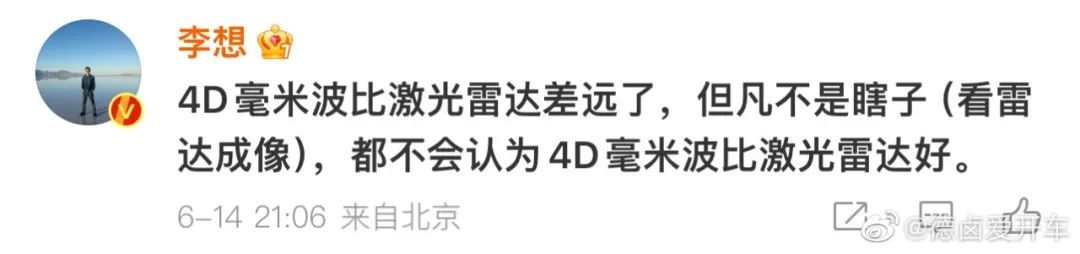
至于中国的头部公司,为什么一致做出了与特斯拉不同的选择,理想CEO李想在微博给出了一部分解释:


理想在城市NOA上的推进,也带动了国内激光雷达厂商出货飙升。
(相比特斯拉选择的4D毫米波),激光雷达的成像质量和成像精度要高很多;
中国激光雷达公司的成本控制能力,大幅强于美国的本土供应商;
针对接下来的BEV4D,激光雷达会有一轮成本下降。
理想在城市NOA上的推进,也带动了国内激光雷达厂商出货飙升。
具有城市NOA功能的理想L系MAX版本,搭载了禾赛科技的车规级激光雷达AT128,L系畅销拉动禾赛去年累计出货量超10万台,单月交付过1万台。
今年理想的交付目标正快速奔向40万台级别。
在城市NOA上,理想甚至在上周末的发布会上喊出了「中高端车型后续不配城市NOA就卖不好的」的激进期许,这也将给激光雷达厂商创造新的出货高峰。
HiEV了解到,在L系之后,理想的高压纯电平台W系列(首款车型正式名为 MEGA),也定点了禾赛的产品。
禾赛科技CEO李一帆之前在接受采访时表示:目前在搭载激光雷达的车型上,随着高阶智驾功能的深入,用户会获得更好的体验与服务。 这是挺有意思的现象,过去你买车的时候,它就在生命周期的价值最高点,而智能汽车的价值会随着时间增加。
HiEV了解到,在L系之后,理想的高压纯电平台W系列(首款车型正式名为 MEGA),也定点了禾赛的产品。
禾赛科技CEO李一帆之前在接受采访时表示:目前在搭载激光雷达的车型上,随着高阶智驾功能的深入,用户会获得更好的体验与服务。 这是挺有意思的现象,过去你买车的时候,它就在生命周期的价值最高点,而智能汽车的价值会随着时间增加。
国内主流的智驾厂商基本达成共识:激光雷达+大算力芯片+ AI大模型 = 城市NOA,激光雷达成为城市NOA的标配。
三、激光雷达加持下,中国车企与特斯拉FSD的赛跑
在全球范围内,特斯拉FSD以近40万台的内测用户规模(Beta版),以及美国、加拿大两地开放,在用户量和地理范围上一马当先。
有供应商预计,特斯拉FSD最晚将在今年下、明年内在国内开启FSD的内测,其最早将在2025年在中国开放FSD功能。这个消息无疑进一步加速了国内新能源汽车厂商们的内卷。
蔚来预计在今年Q3推送领航换电功能,下半年推送城区NOP+;
华为预计今年ADS 2.0将开放45座城市;
理想的城市NOA今年将进军100座城市,并开放通勤NOA功能;
小鹏预计今年将在数十个城市开放城市NGP,并大规模开放LCC+以及通勤模式;
入局较晚的比亚迪,当前也在筹备高速NOA与城市NOA的量产。
而中国的头部车企正凭借激光雷达等高性能硬件的应用,快速缩小技术差距,拉平甚至在体验上反超。
随着城市NOA的快速发展,激光雷达作为护航城市NOA的安全件与功能件,也将迎来更加迅猛的增长。