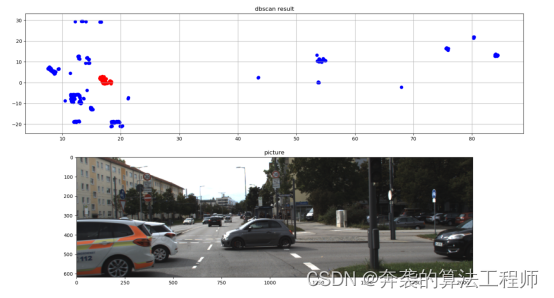
4D雷达点云数量较多,可参考激光雷达的处理方法,通过聚类和计算朝向等方式得到点云的包围框。
首先通过DBSCAN聚类,得到目标的聚类结果,如下图红色即是正前方横穿目标的点云,显示使用鸟瞰图。
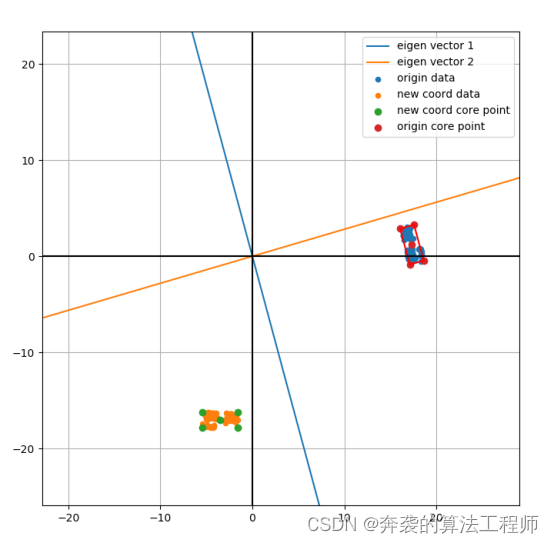
为了计算聚类后点云的OBB,需要先计算目标的朝向,可考虑使用主成分分析PCA算法。由于大部分情况下目标在平整地面,可考虑使用地面投影点计算(也即只计算x,y)。
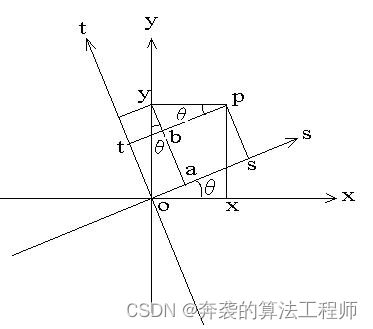
得到聚类点云的朝向向量vector之后,将x坐标轴旋转至和vector一致。方法见参考资料。
坐标变换后的点云最大、最小坐标代表了聚类目标的尺度,也即
length = maxL - minL
width = maxW - minW
同样可以中心点坐标
centerX = (maxX + minL) / 2
centerY = (maxY + minY) / 2
通过中心点和长宽可以计算四个角点坐标,再反向旋转即可得到原始坐标系下雷达点云的中心点和四个角点,连接四个角点则得到点云的包围框。
同步可以获得聚类后目标的长宽、朝向等信息。
参考资料: