因为和傲酷(Oculii)接触比较久了,今天和大家分享关于傲酷4D雷达
第一篇为:傲酷4D高清成像雷达的创新与应用 报告的时间为2021年4月15日。
报告入口: https://apposcmf8kb5033.pc.xiaoe-tech.com/live_pc/l_606f1355e4b0d4eb038fabc9=
另外一个为今年苏州的毫米波大会中来自傲酷的分享。
特别标注及声明:并非软广,本文记录和说明均来自两个报告,均是郄总声称达到的水平。
-----------------------------------------------------------------------------------------------------------
以下是正文:
两篇报告都是有郄建军,郄总来做,简单介绍一下郄总(介绍词来自苏州毫米波大会的介绍词):
郄建军先生在汽车、互联网、移动通信及公安行业等拥有三十年多年从业经历。曾在摩托罗拉公司、高德公司、公安部等担任高级管理职位。2017年加入傲酷公司(Oculii),任CMO兼亚太区总裁,将4D成像毫米波雷达,在中国首次全面普及推广。促成多家OEM的量产前装项目定点,公司最终成功被安霸收购。自2021年加入安霸以来,带领中国市场团队,致力于将安霸的智能驾驶芯片解决方案在中国市场落地生根,发展壮大。郄建军先生拥有吉林大学无线通信学士学位,哈尔滨工业大学移动及网络通信硕士学位。
报告一:
报告由郄总来做。开篇讲到了其出身,是做高精地图出身的,也以小米为例子,提到了和小米公司的一些合作。与手机需求类似,关键器件也已然成为了行业的迫切需求,可能成为决定性的“拐点技术”。

4D 角雷达的可以做到这么小,功耗约2W。
报告分为4个部分: 行业现状、虚拟孔径成像技术、傲酷最新的4D产品、在L3/L4及其他领域的应用。
郄总提到某主机厂已定点使用他们的4D雷达。

郄总从传感器特性说起再提到马斯克对那时sensor的看法:
显然马斯克认为视觉更胜一筹,而雷达往往会带来问题。
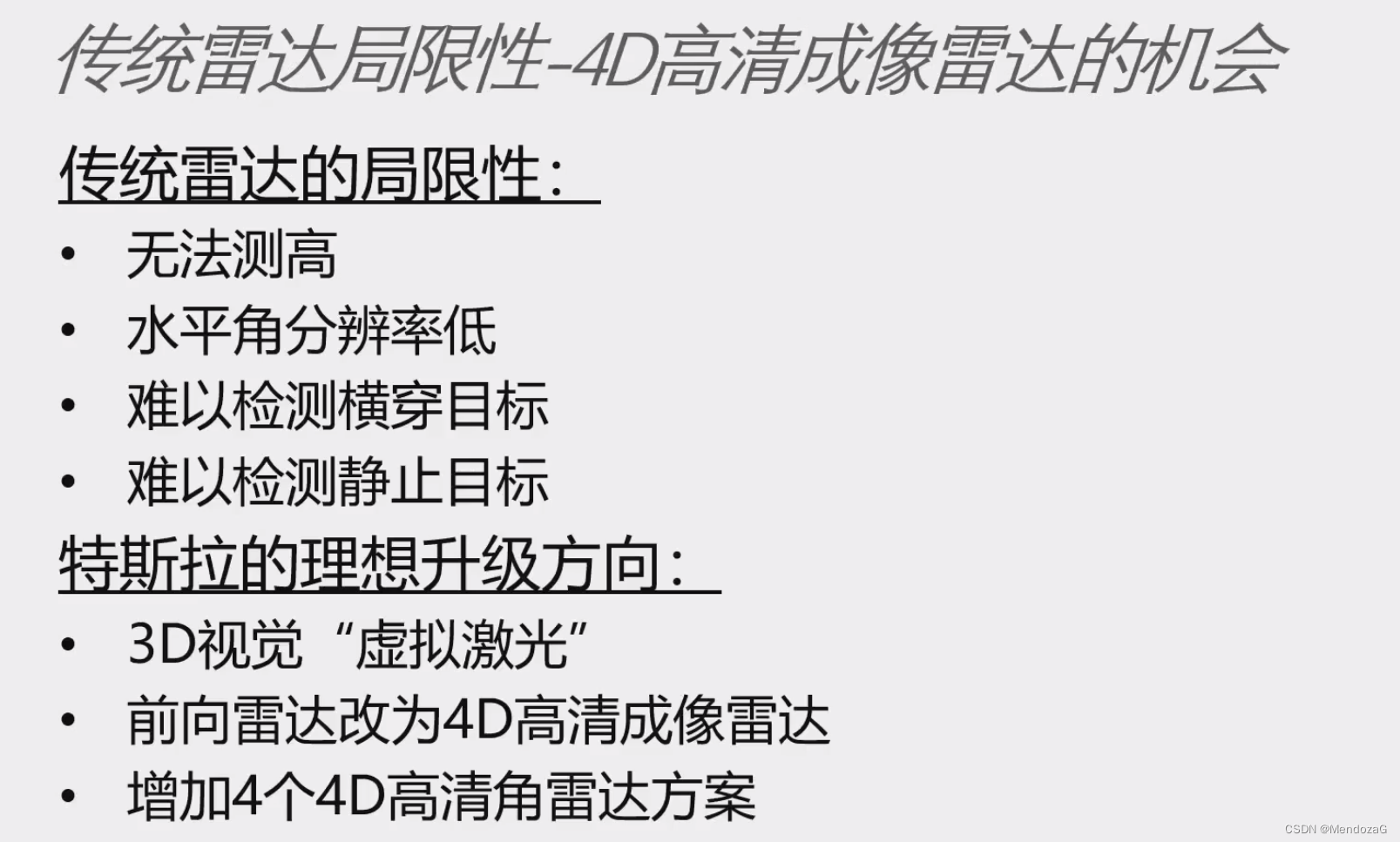
对于传统雷达无法测高、角分辨率低、横穿物体和静止物体不敏感。
4D雷达的技术路线方式:

傲酷硬件上和其他家类似,前面提到的角雷达采用的就是TI的1843,其 算法+独特的天线设计 使得其有优秀的性能和较低物料成本。
waymo实际已经上了6个4D雷达,并形成较高的依赖(waymo采用4级联的方式,已于傲酷接触想从算法角度来优化其雷达):

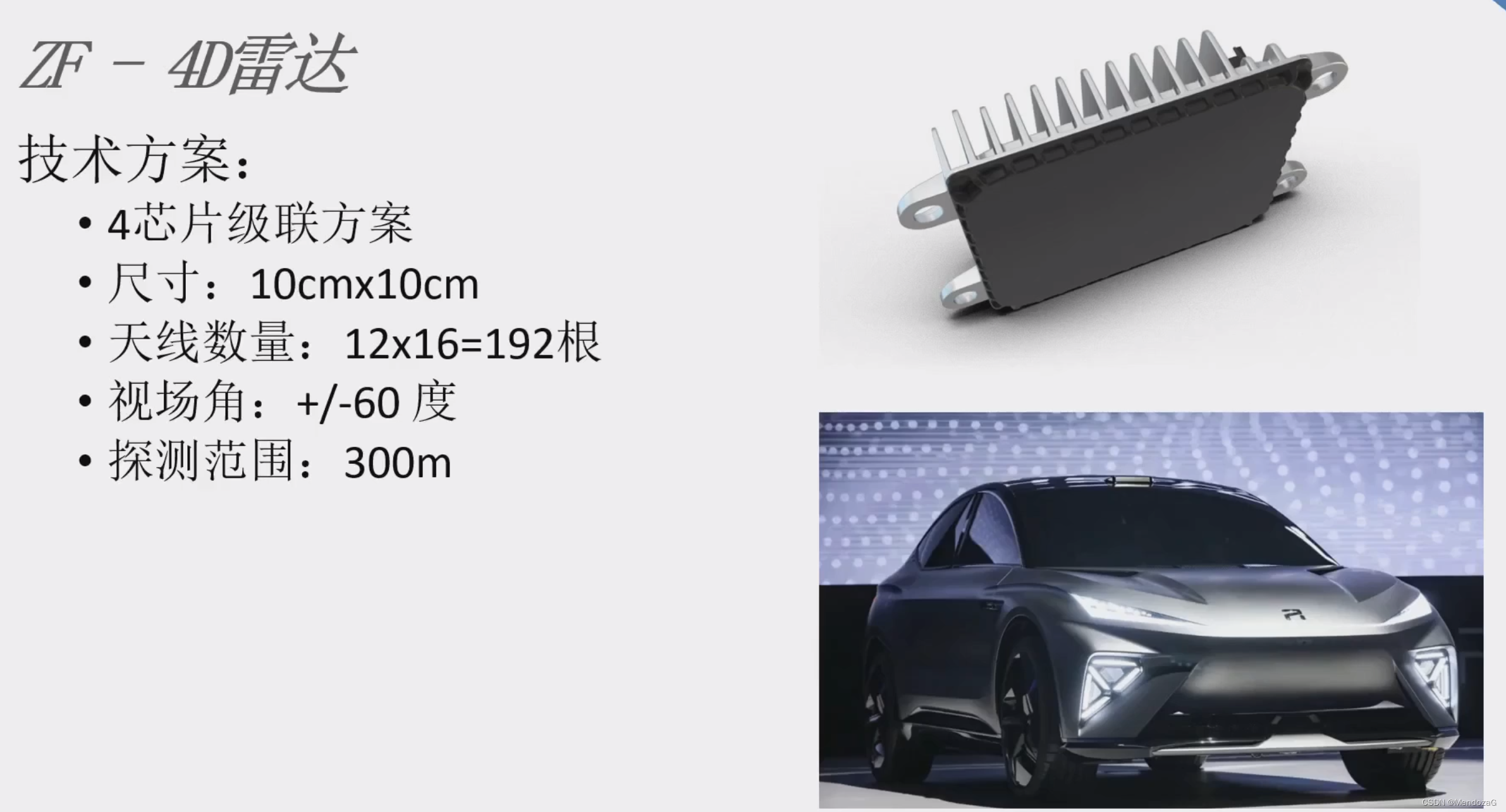
上汽的ZF 4D雷达,采用四级联的TI2243 + FPGA 探测距离300m
大陆540

华为:四级联方案
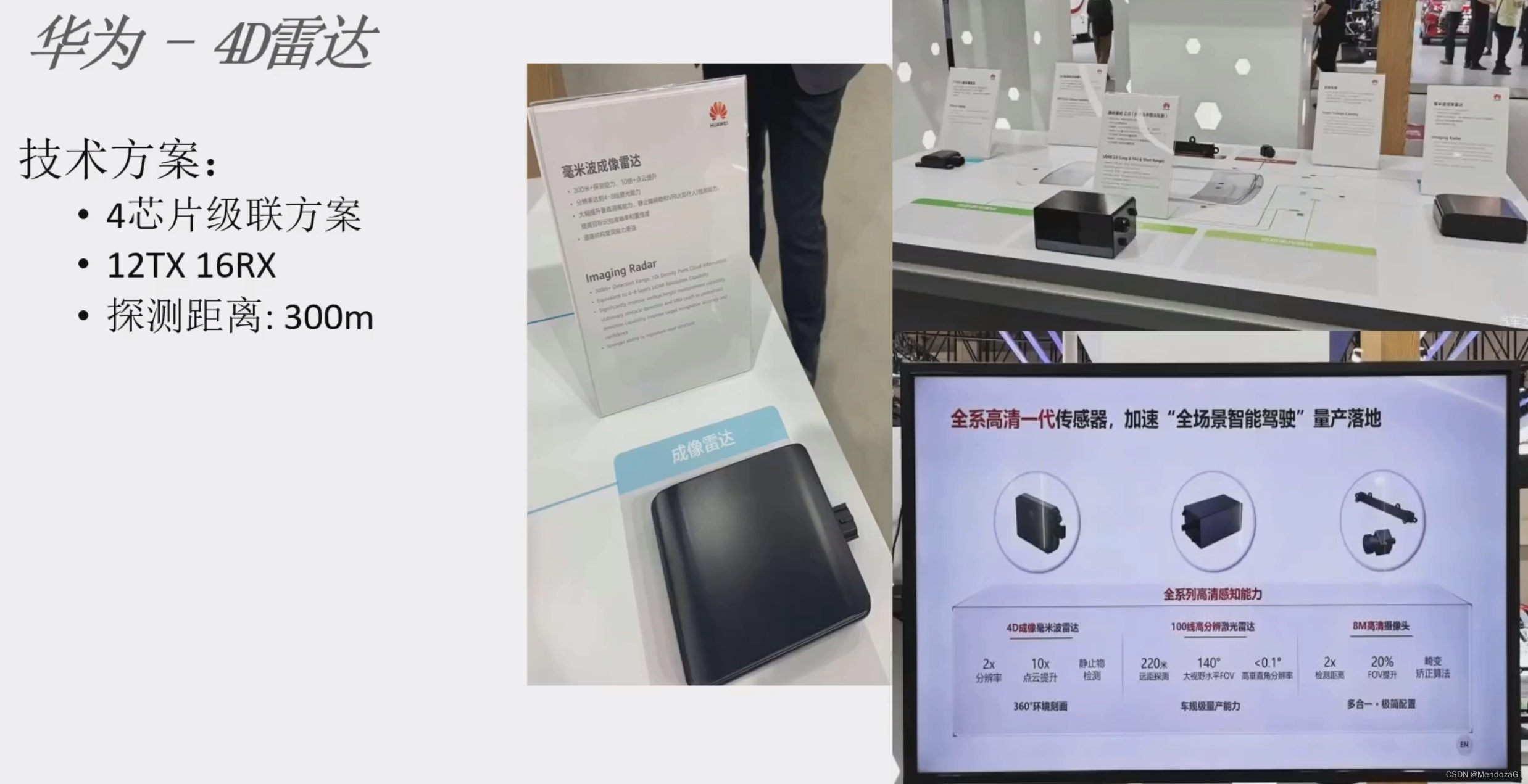
从上面可以看出功耗都比较高,尺寸也比较大。
Arbe的专门做芯片:(48发48收) 天线多,噪声比较大。

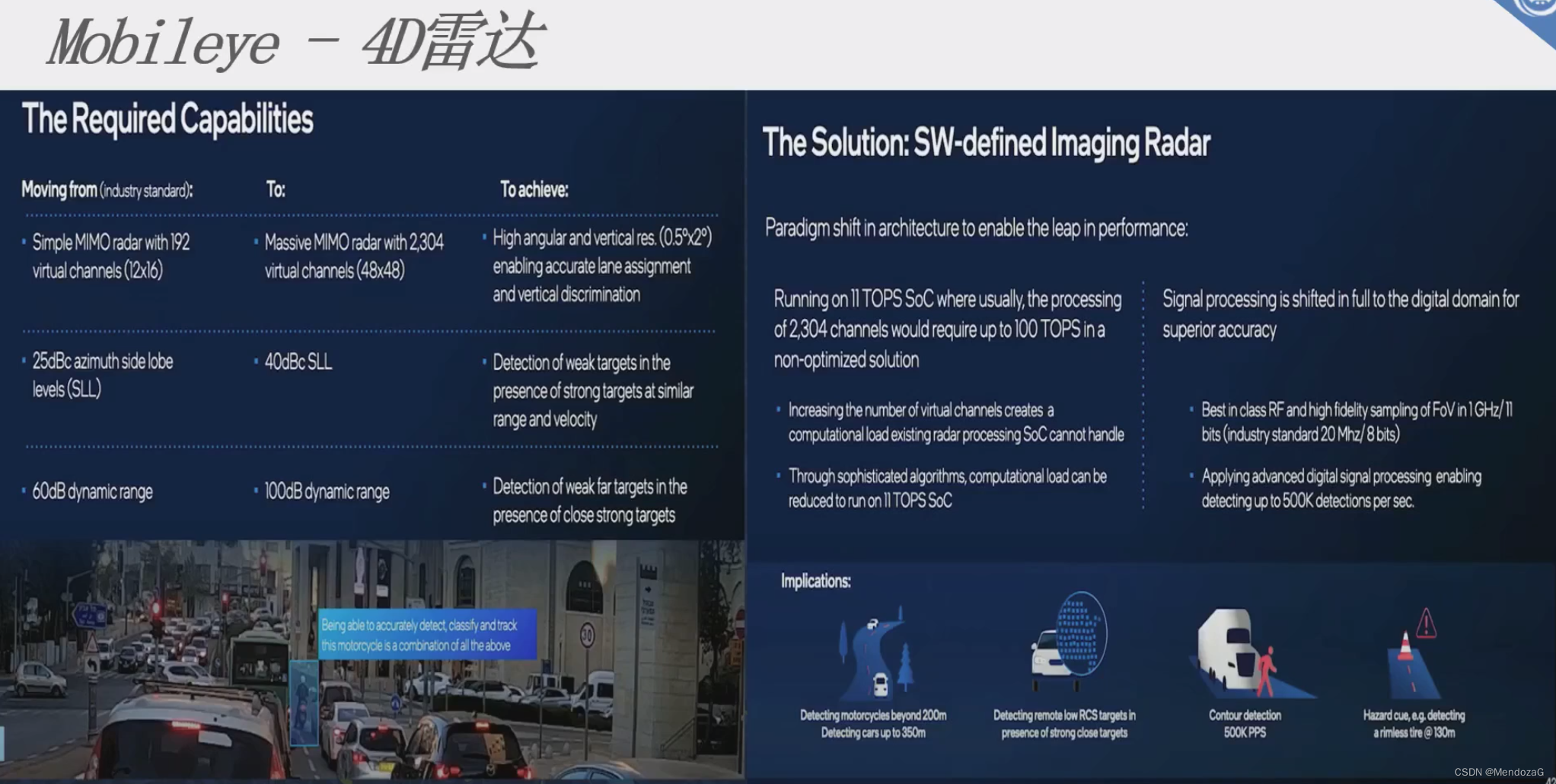
Mobileye:
接下来郄总讲解傲酷的技术栈:
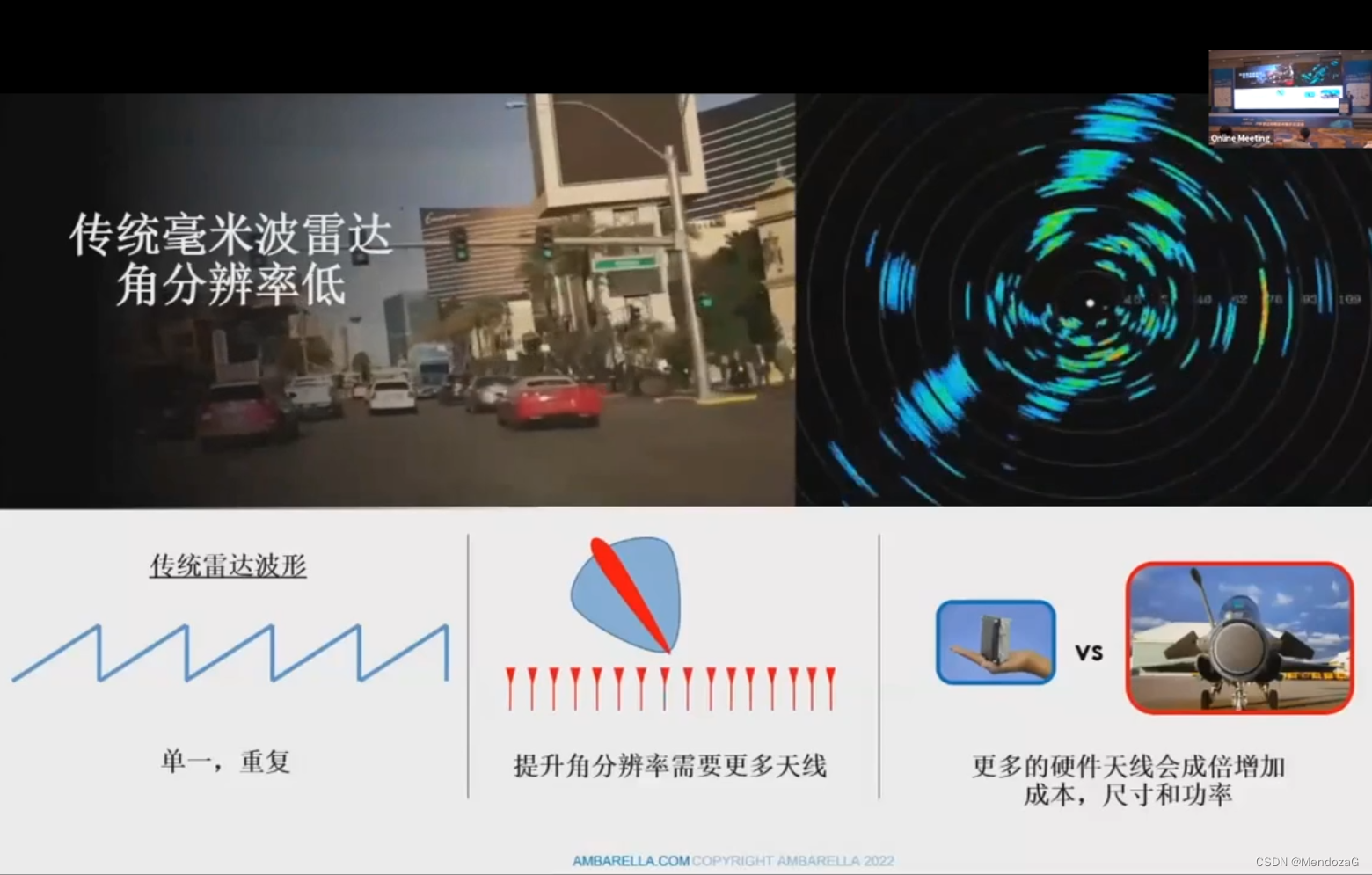
普通的雷达技术栈都是此类方式,增加天线;(飞机上毫米波作为几乎最重要的感知设备,能达到百发白收)
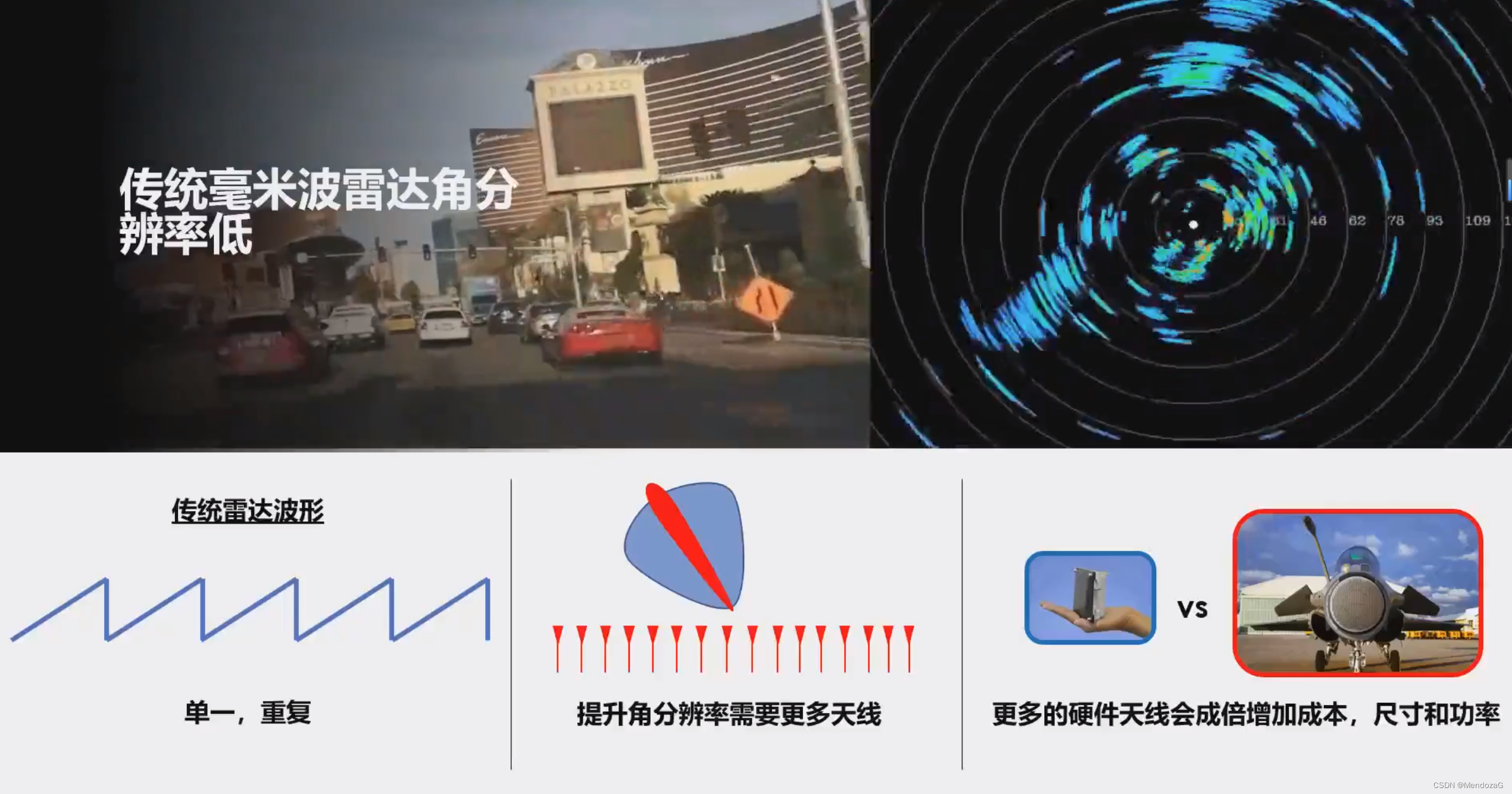
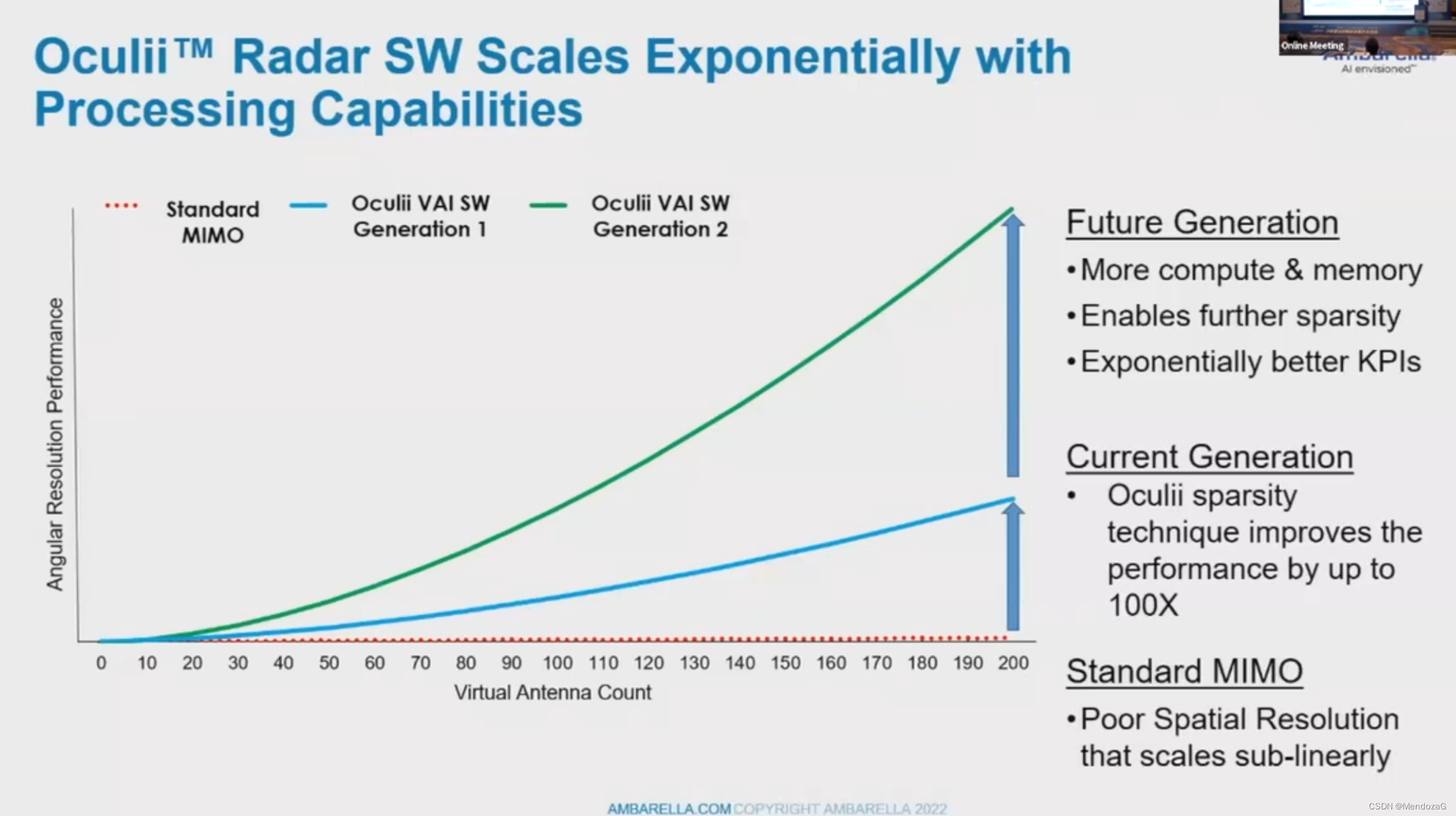
傲酷使用算法的方式,可以将分辨率提高100倍,声称其波形是不一样的(调幅调相调频,三者都调,且自适应)上一帧和下一帧会产生闭环和关联,根据环境变化而变化。再解调,提取其中的信息。软件虚拟出20倍甚至100倍的天线。
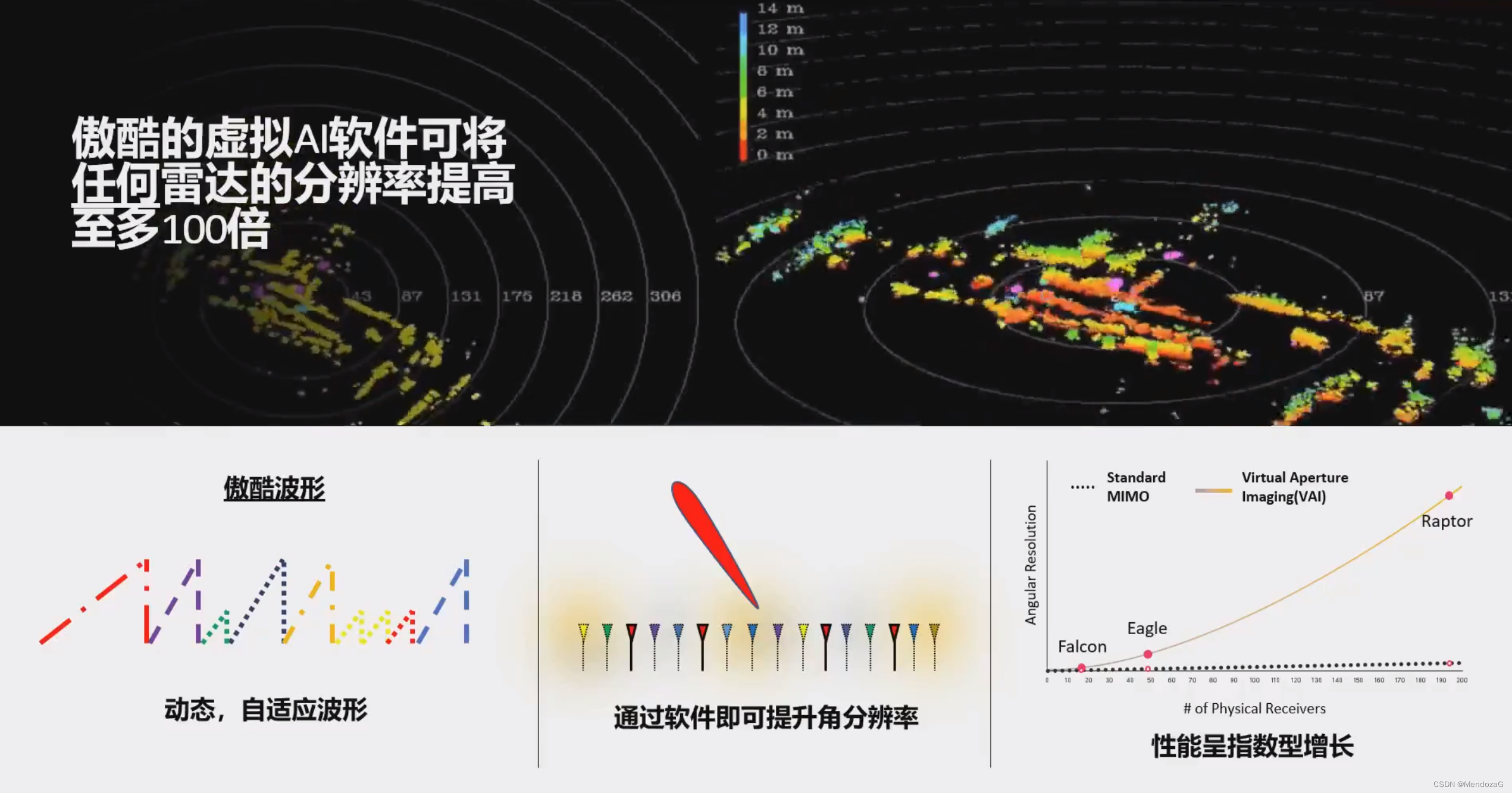
从上面这个图可以看出,他们后续也在将其算法用在三发四收的也就是Raptor。

功耗非常低,四级联甚至可以达到激光的水平(0.1度,视场角很大,没有使用FPGA)。
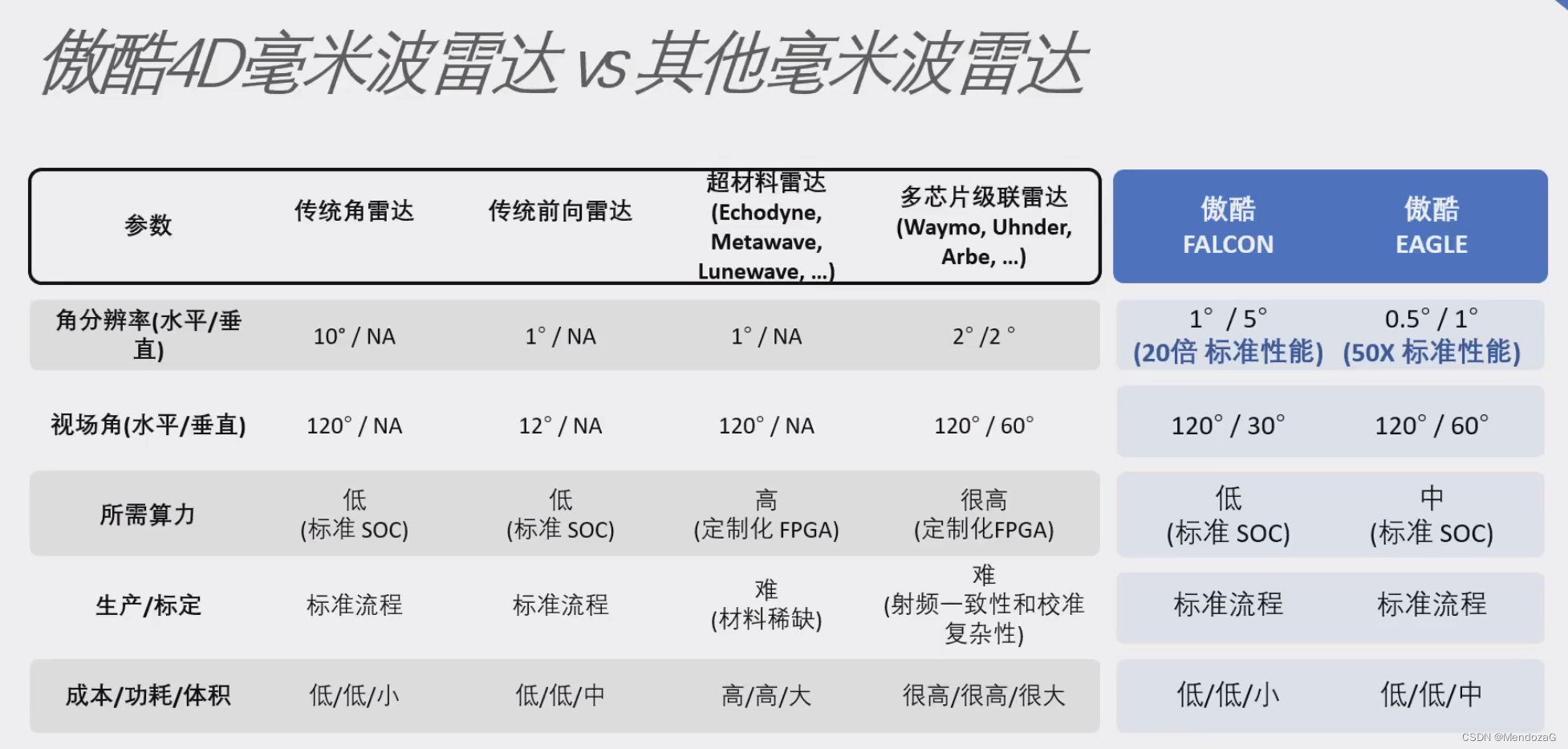
产品对比:
4个角雷达+1个前向(Robotaxi场景 )

高速场景:
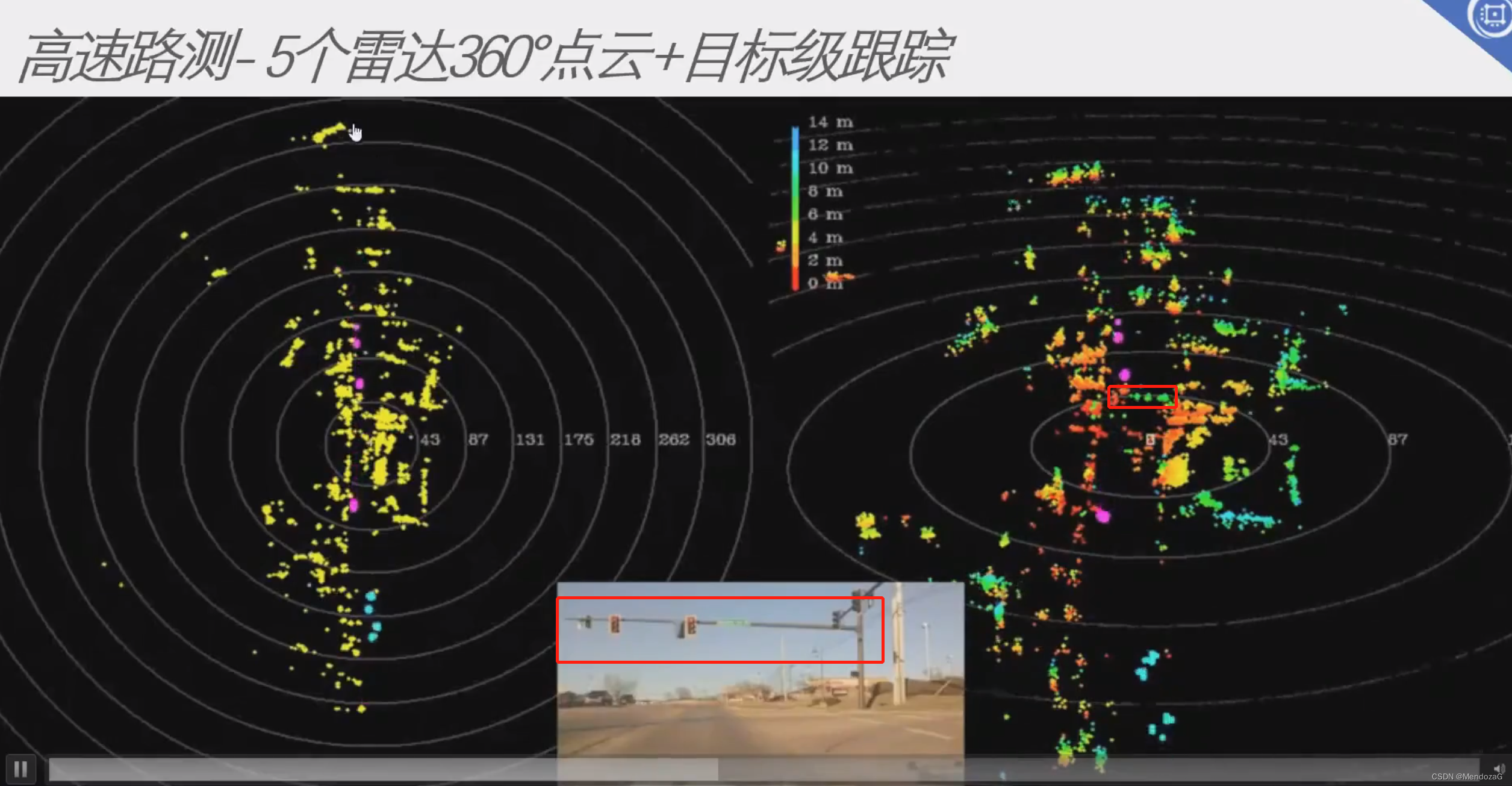
可以看出静止的有高度信息的都可以检测出来。也可以加激光组成传感器组。
对标激光:(对比的Velodyne的16线)
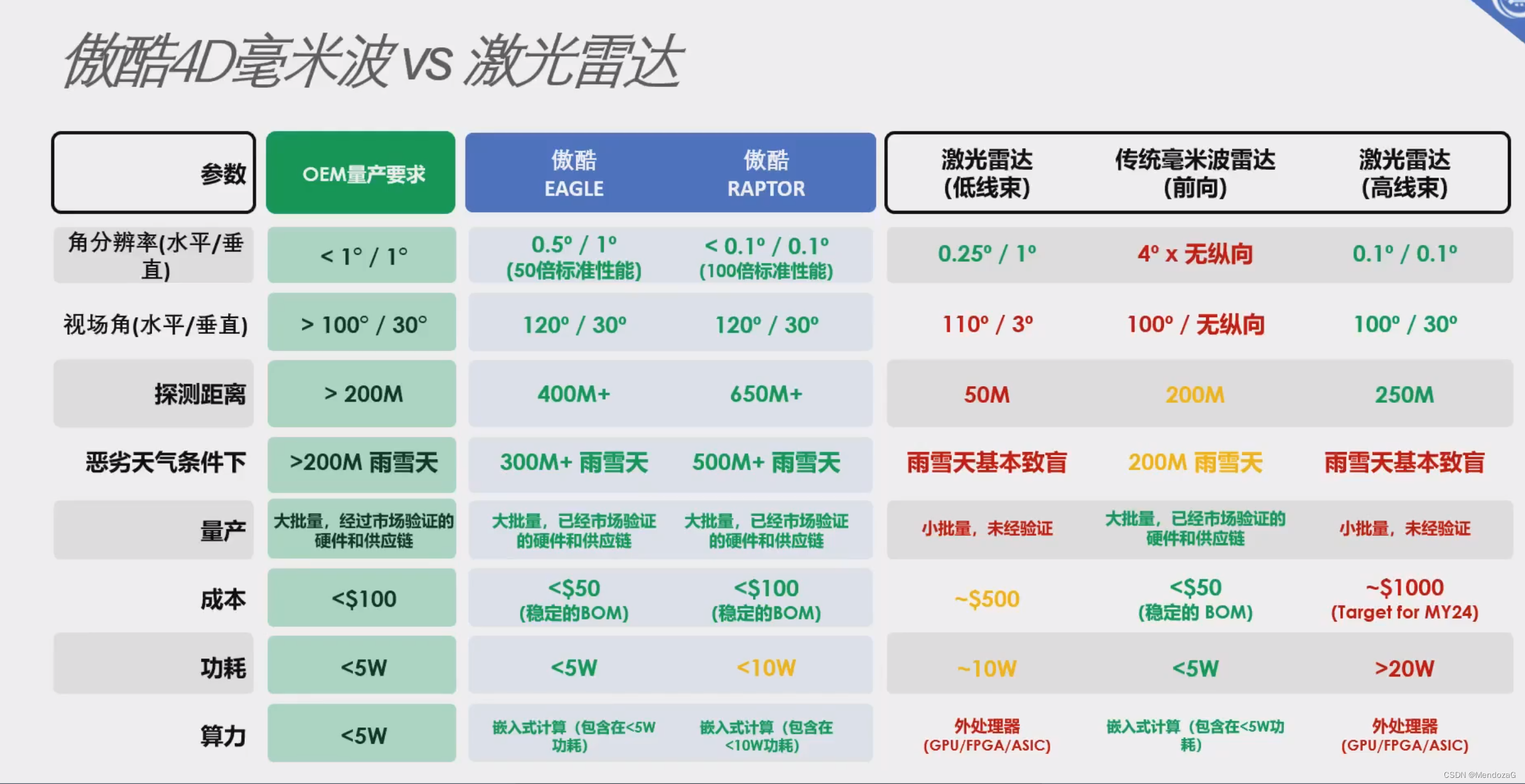
对于算力要求较低,直接在SoC上完成。

在高速场景上更加依赖毫米波。在高成本时可以都装上以获取更好的感知,若低成本则可以仅装毫米波成像雷达即可。
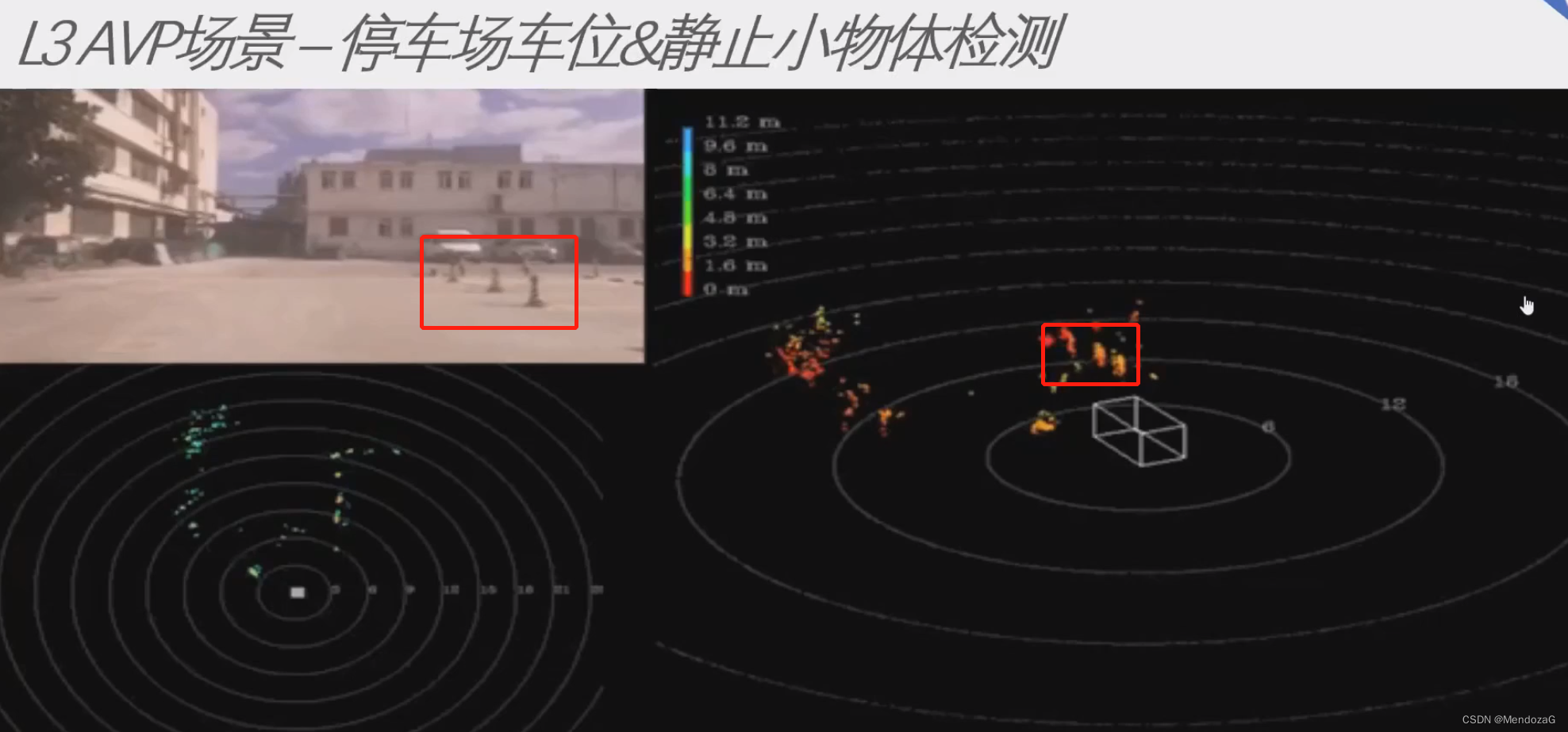
接下来提到了泊车场景,特别是对于业界难点雪糕筒、三角锥这种小目标做了展示:
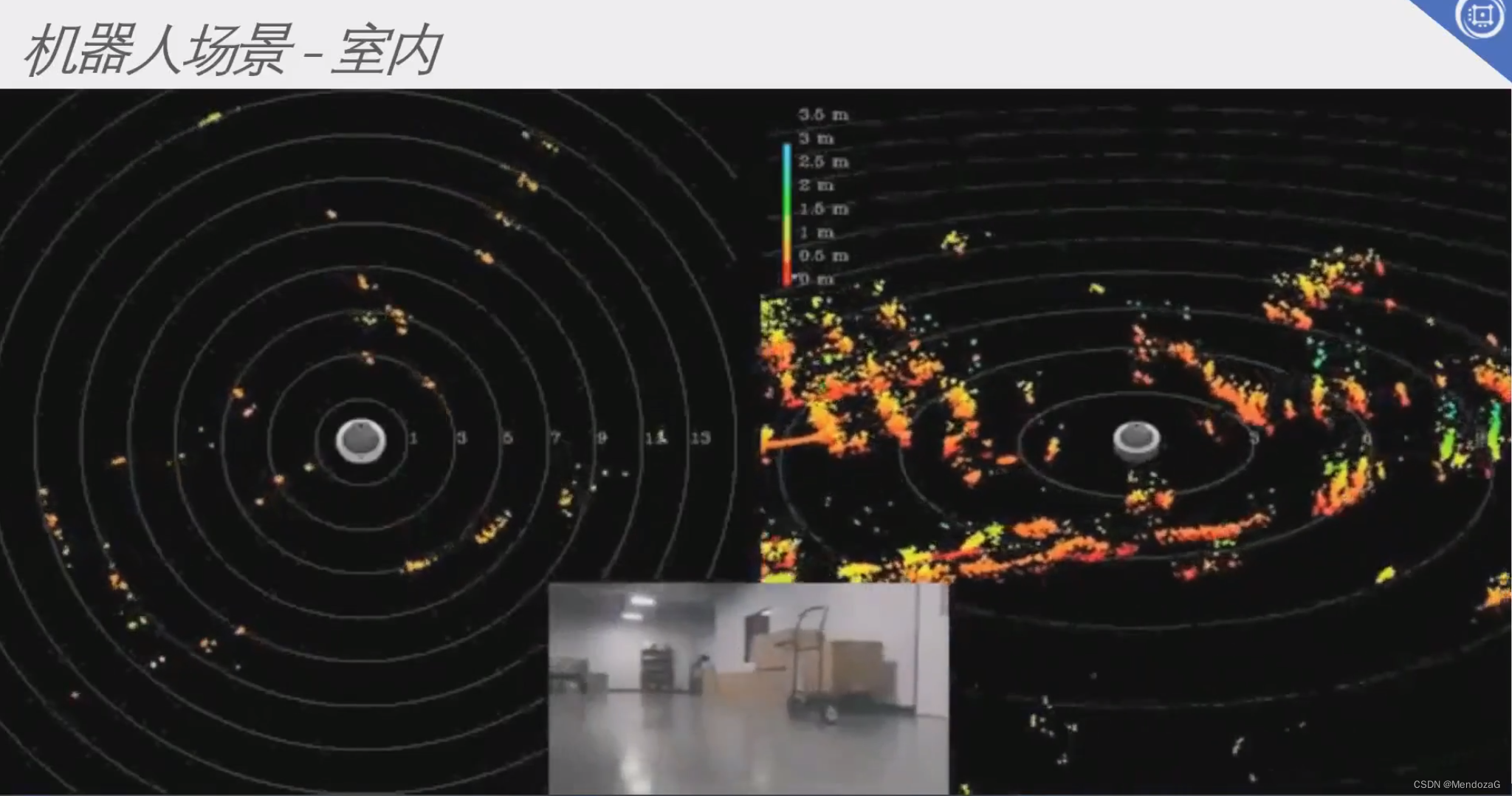
室内场景,多径非常严重,也是一个难点,其给亚马逊做的效果如下:
点云建图:
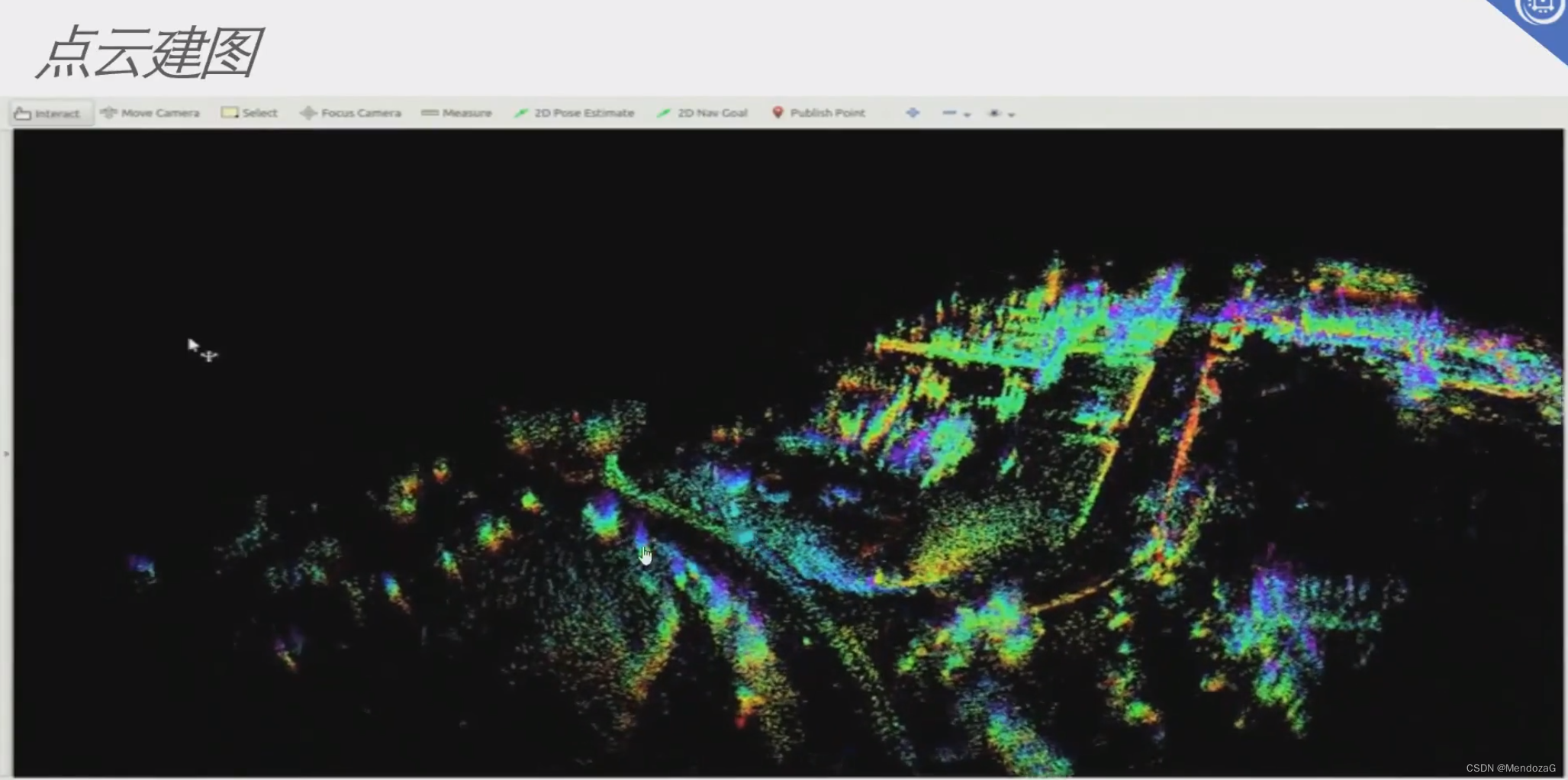
定位可以做到10cm的精度。雷达SLAM,非常新颖。
无人物流小车--SLAM制图、定位导航(给长城汽车做的项目),右边是处理后的图,左右摇摆15cm。

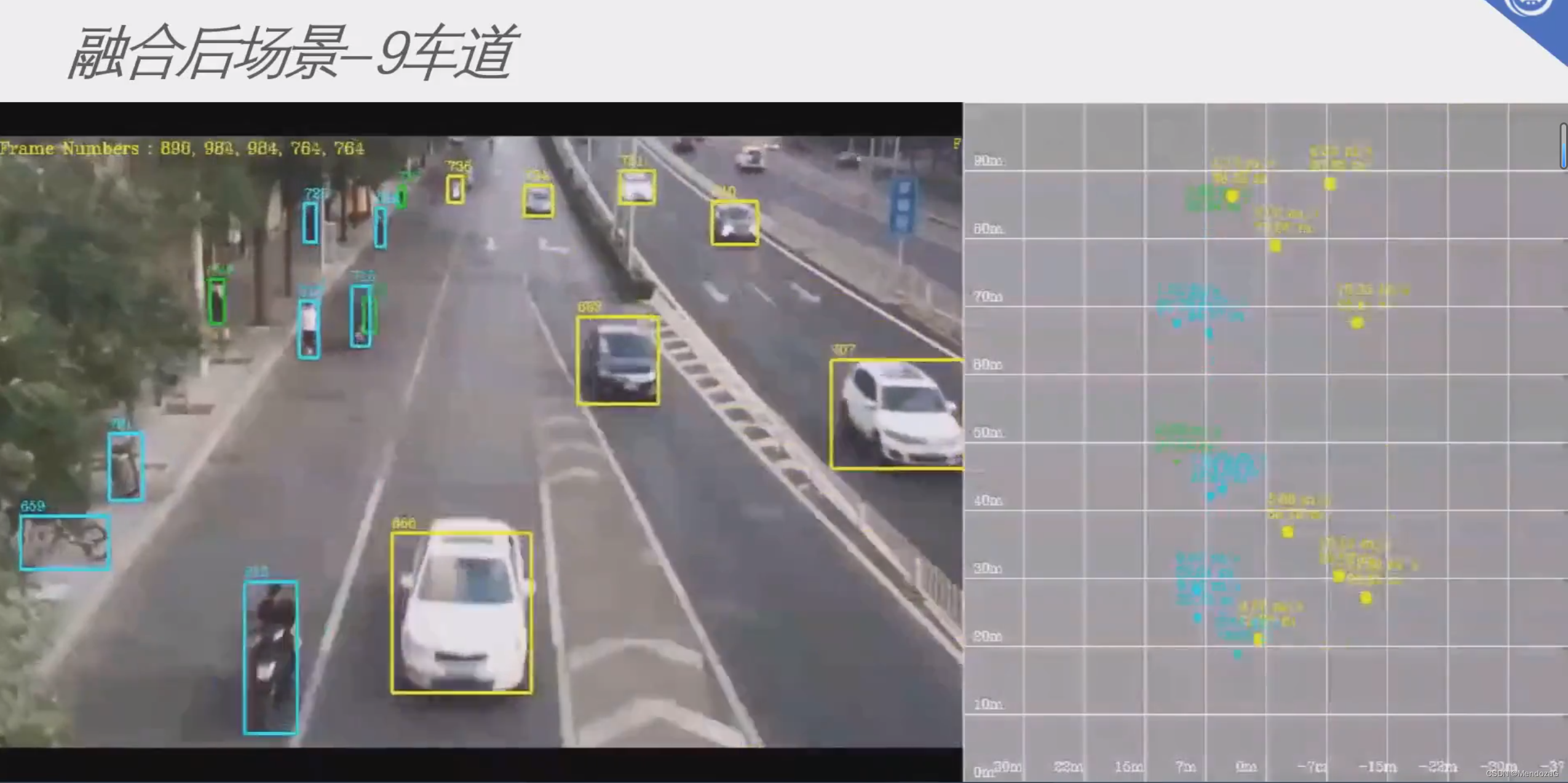
复杂路口:郄总强调和视觉的配合

和视觉的融合:

团队介绍:(甚至有前大陆的CEO)

合作的公司:

分享后的Q&A环节,郄总是通过语音的形式对个别问题进行了回复,这里我选取部分稍加整理一下:
1. 用的什么芯片?
TI 的1843、2243等都在用,英飞凌、NXP也在用,并不依赖某芯片。
2. 抗干扰性能如何,应对震动是如何保证的?
主要是三种调制,每个chirp是不一样的,雷达之间是不一样的,干扰的机会较少、还做了相关算法;震动和撞击都进行过测试都可以保障。
3. 是否使用了SAR成像?
没有使用。车载上具备一定的局限性,比如实时性(需要积累),也不作运动补偿。
4. 多径干扰如何解决的?目标分类如何做?
调相会产生比较的多径问题,但是他们有相关专利和算法来解决;他们的雷达点数目较多,但也需要做(深度)学习可能会获得更好的结果。
5. 跟IMU、相机如何去融合?
业界做了很多努力,后融合是业界的主流做法,但是该雷达点云数目很多,可以尝试去做前融合。一般使用前融合。
6. 自动泊车是否做过?
正在探索,是一个很好的方向,角雷达大有可为,纵目科技已经做了相关的项目。
7. 4D哪几个维度?
xyz+速度或者几个角度+速度
8. 傲酷的虚拟孔径阵列技术,很大程度提升了角度分辨能力。但是一般的孔径扩展技术,一般是增加物理孔径。请教一下,傲酷是通过牺牲时间或者多普勒去构造虚拟阵元呢,还是利用了一些先验信息呢?
都没有牺牲,动态智能的。
9. waymo 合作,环境感知与自适应变换,根据波形和反射强度等分析,点云36000点。
10. 可靠性验证,是否有增加?
在传统的毫米波上增加了一些指标。
11. 4D了点和激光的关系?
不是要取代激光,4个角雷达+前向+激光。布置起来容易不会更改结构,遮挡问题也不严重。低线束有一定关系(可以替代),但是高线数的还是需要互补。对于超声波来说虽然价格便宜,从技术上来说也有替代的可行性。
12. 价格?
成本普通毫米波芯片,BOM价格低。软件的另算
13. 刷新率?
10~20Hz可调,可以根据需要调整。 (接了跑车的项目)
14. 时延如何?
和标准普通雷达一样,不会牺牲额外的时延。
15. 带宽是多少?
76~77,500M; 77~79 1G也有;在一个G以内可以解决问题、
16. 是否有公开数据集?
目前没有。
17. 跟Arbe、森斯泰克的优势?
上面有提到,完全的虚拟孔径,算法赋能,效果很好,成本更优。
18. 迎面车,多部雷达有何干扰么?
专门测试过,雷达对雷达互相没有干扰,每个chirp的信号都不一样,两个雷达没有互相一样的。对于别人的雷达,如大陆或者博世的,基本没有影响,只有当斜率差不多时会有较强影响;车路协同中,也测试过,也不干扰。
19. 不靠时间积累如何做到20~100倍虚拟孔径?
独特之处在调相,同样是每个chirp中不同的相位,在解调的时候能提取相关信息。可以参考其专利,主要是水平和纵向都在做,分别发的东西是不一样的,水平,纵向10倍,4级联可以达到100倍。
20. falcon为例单帧点数为多少?
每帧2000点,实际上原始点云10万,使用单TI的1843就可以做到,无需DSP及FPGA等处理。
------------------------------------------------------------------------------------------------
报告二:苏州毫米波大会
题目:4D 成像雷达跨入 AI 时代 4D Imaging Radar enters AI Era——安霸半导体技术(上海)有限公司 Ambarella

首先郄总对安霸公司进行了简介:

安霸是一家做视频芯片的公司起家的半导体芯片公司,15年收购了VSLAM等等。
CV3芯片:域控芯片,算力较高
(补充阅读:单颗芯片即可搭建自动驾驶系统?安霸CV3系列芯片,2022年上半年首批样品上线)


接下来讲的是4D雷达:(能否将sensor技术“压榨”到极致)
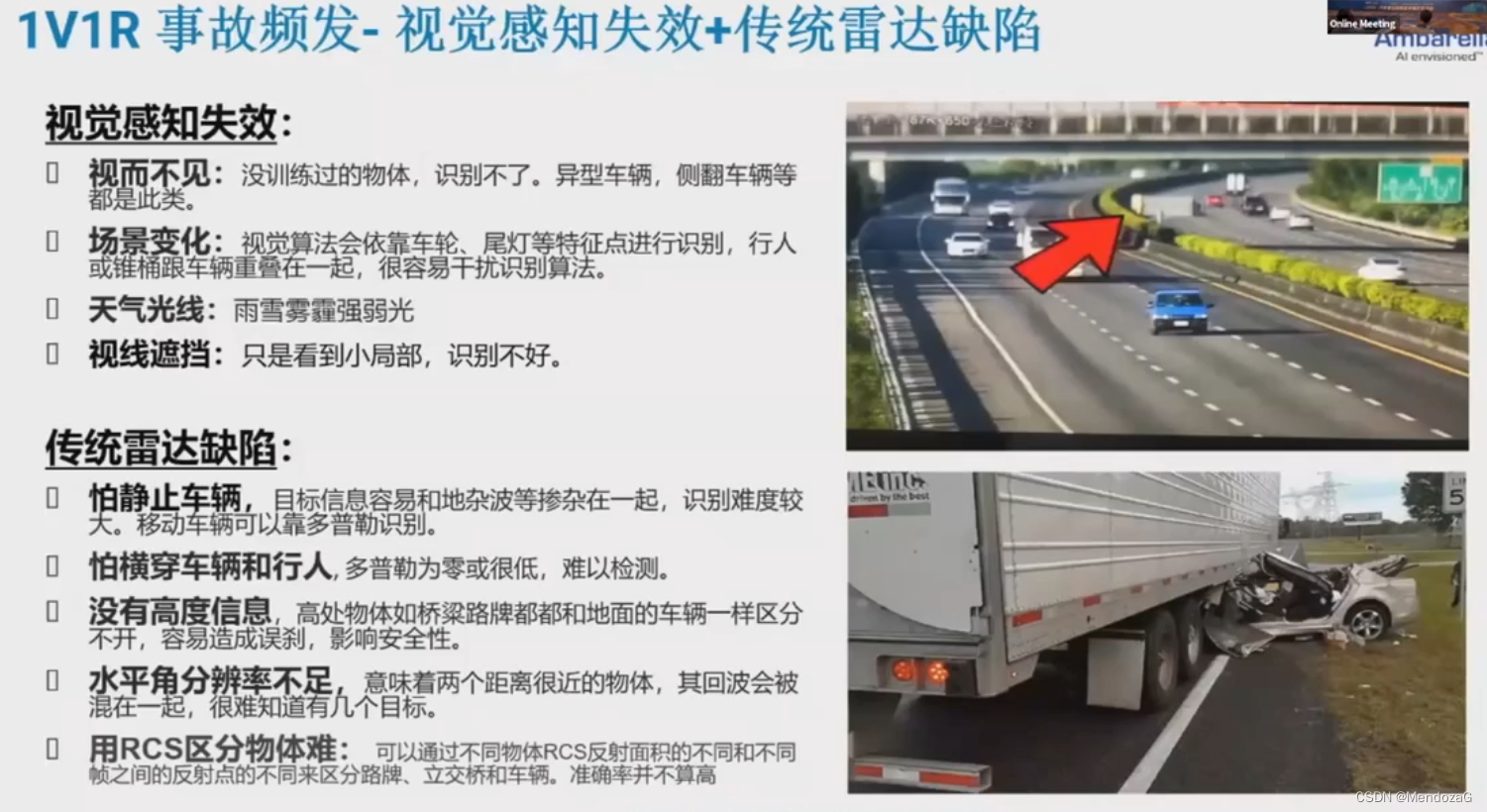
起初讲了经典的雨雪雾霾强弱光问题,以及测距测速问题。以及视觉+雷达的事故(x鹏汽车、x斯拉等)
原因分析:主要是两种视觉的经典缺陷问题以及传统雷达的问题。
主要还是讲了其虚拟孔径技术PPT同上次报告:
自适应波形(同上次报告)后面只展示一些新增的内容:
地库高度显示:
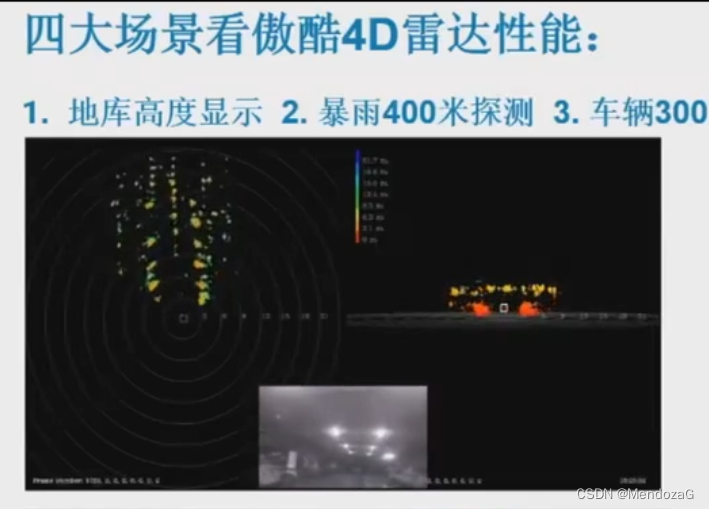
暴雨天气: 可以看到300~400m
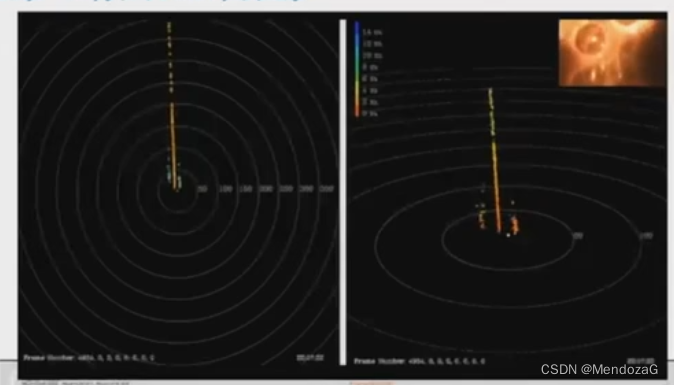
分开两个角反测试:可以达到0.6度
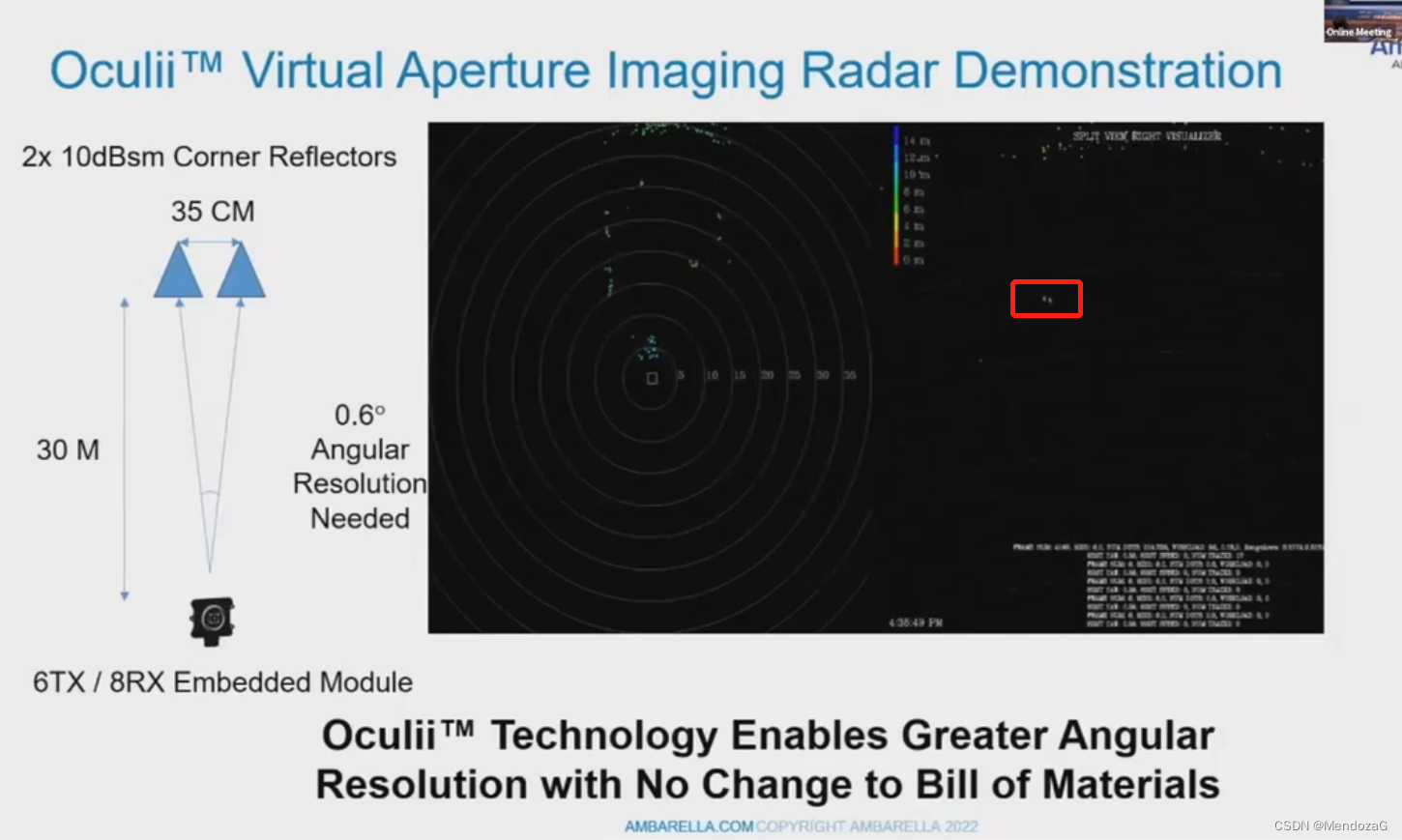
可以做原始点云级别的前融合,安霸和傲酷优势互补:
总结:报告主要阐述了4D雷达的优势和技术栈,以及实现的主流方式,不同厂商目前的方案如何以及其产品在目前的业界地位如何。可以看到目前4D雷达已进入了包括量产车、建图定位等领域,可以说有着非常promising的前景!