4D雷达是一种利用回声定位和一种叫做飞行时间测量的概念来绘制三维环境中的物体的技术。它目前正在自动驾驶汽车行业研发,用于绘制车辆路径上的目标物位置、大小等。它与激光雷达、标准雷达和照相机等技术不同,因为4D雷达可以在所有类型的天气和环境条件下告诉车辆何时移动以及速度如何。
摄像机会受到明亮的阳光或黑暗的影响,在深度和对比度方面会有问题。标准雷达在恶劣的天气下工作良好,但不能探测到物体的细节。激光雷达对探测物体很有帮助,但会受到恶劣天气条件的影响。
4D雷达解决了这些技术中的许多问题。这是一项相对较新的技术,它使用大型射频(RF)通道阵列来探测道路上物品的相对速度、距离和方位角,以及道路上方物体的高度。第四维确实指的是时间,但4D雷达并不真正映射时间。相反,它在计算中使用时间来确定物体的高度和它们的相对速度。
为了高分辨率地绘制车辆周围的环境,4D成像雷达使用多输入多输出(MIMO)天线阵列。这可能包括几十根天线,它们向设备周围环境中的目标发射信号,然后接收从目标上反弹下来的信号。天线收到的数据然后被用来生成代表阵列周围区域的点云。大型阵列能够同时对静态和动态物体进行高细节的精确探测。它还可以捕获环境中的多普勒位移,并利用它们来指示物体的移动方向。
由于4D雷达向各个方向发出密集的信号,它可以在车内工作,对儿童和成人进行分类,监测生命体征,并探测乘员的位置。这一功能可用于优化安全气囊的部署,优化安全带的张紧器,提供提前的安全带警告,并探测汽车内或周围的入侵者。
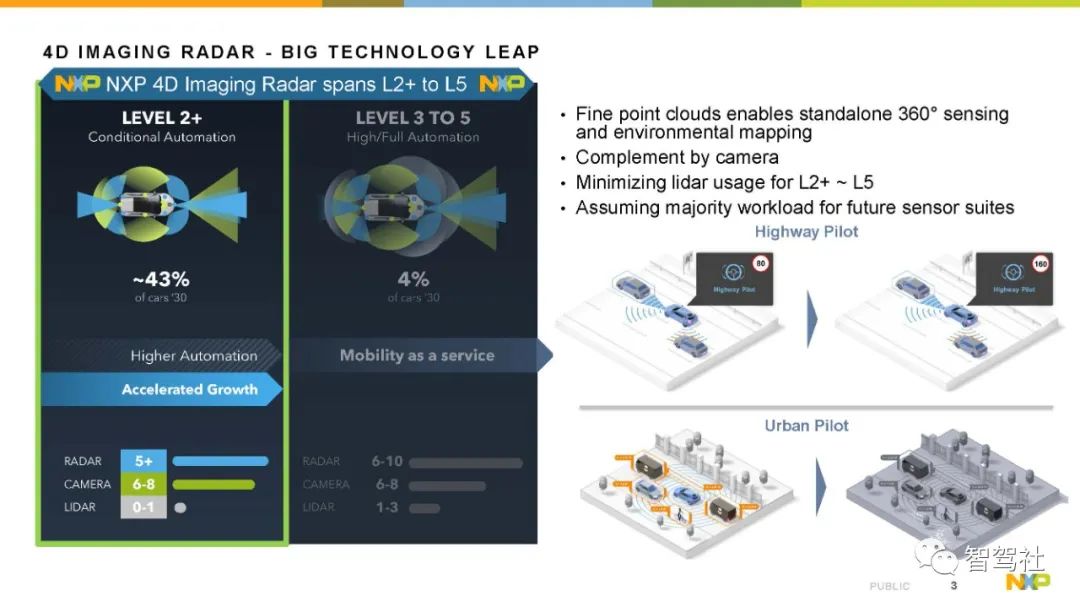
4D雷达也适用于短、中、长距离的应用,因为它比目前的计算机视觉技术有更大的范围。4D雷达的另一个特点是能够看穿物体,因为它不依赖摄像头或光学器件。
总结一下,以下是4D雷达的基本原理:
4D雷达使用一个大型的多输入多输出(MIMO)天线阵列进行回声定位。它发出的信号在环境中的物体上反弹,并捕捉结果以计算环境中物体的大小、位置、方向、速度和高度。
4D雷达可以取代诸如照相机、雷达和激光雷达等用于计算机视觉和车辆自动驾驶的技术。
4D雷达的优点是能够在任何天气和任何照明水平下工作,准确地检测海拔、速度和方向,并检测环境中其他物体后面的目标。