1 基本信息
品牌:海外Tier1采埃孚
• 应用:上汽飞凡中高端纯电平台
• 数量:单车2个,安装在前后保内部
• 最远探测距离:350米
拆解来看,4D雷达主要可以分为4个部分,分别为数字接口板及结构件、发射单元及PCB、屏蔽罩、雷达天线罩。

2 发射单元及PCB(正面)
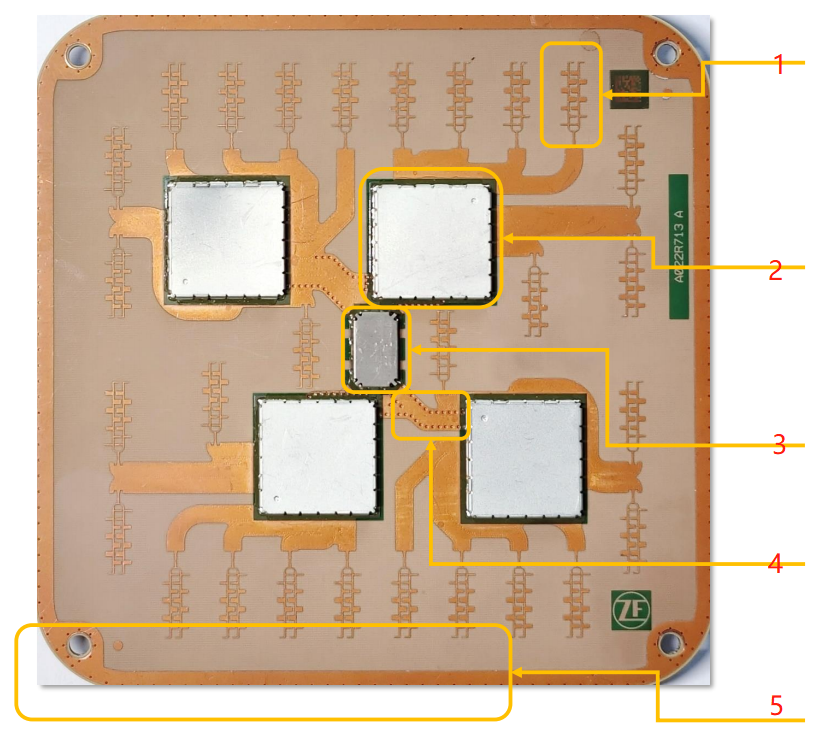
正面可以分为5个部分,如下图标识,每个部分描述如下。
1.微带天线阵列:这一面上一共有天线28根,分为发射天线和接收天线两类,其中
12个发射天线
(TX)
,
16
个接收天线
(RX),通过MIMO
技术增加虚拟孔径,形成
192个虚拟通道。
2.单片微波集成电路MMIC:本雷达一共有
4个MMIC,采用多片级联的方式连接。外部银色的为屏蔽罩,内部为
MMIC。MMIC是雷达关键零部件,负责毫米波信号的调制、发射、接收以及回波信号的解调。
3.分功电阻:4
个
MMIC存在主从关系,功率需要均匀的分配到三个
slave MMIC,分功电阻将本振功分信号功率进行均匀分配。
4.本振功分线:覆铜打孔处,用于4
个MMIC的同步。
5.高频PCB板材:用于蚀刻毫米波雷达天线。性能要求高于普通
PCB
。
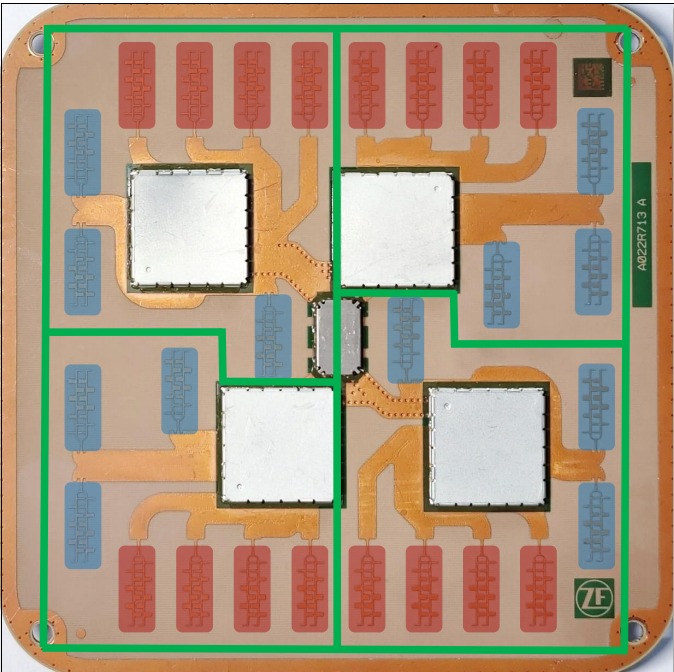
可以看到4D雷达一共28
根收发天线,一共
4
个
MMIC
,单个
MMIC具有
3
发射天线及
4接收天线。左图中,我们用绿色线框分割帮助梳理天线所属的
MMIC
。
蓝色
标注为发射天线,
红色
标注为接收天线。
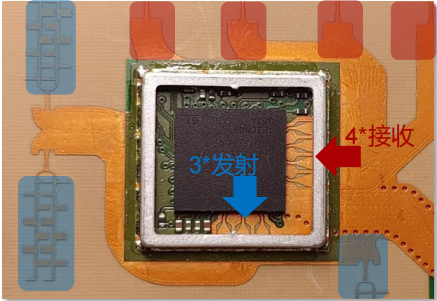
移除屏蔽罩后,我们可以清晰的看见内部黑色的MMIC
,以及
3
发
4
收的电路特征。
MMIC具体型号为
AWR2243P
,由德州仪器提供。
AWR2243是TI
第二代毫米波传感器,使用了TI第二代毫米波射频前端,射频性能比第一代产品有了大幅提升,本雷达使用的
AWR2243P
是支持多片级联的型号
。
3 4D雷达如何做到4D
传统毫米波雷达也叫3D
毫米波雷达,具有
3个维度的信息,分别是
距离
、
速度
、
方位角,不含有高度信息
。
• 距离探测:通过计算经过调制的连续调频
FMCW信号与回波之间的频率差来计算距离,雷达发射
FMCW电磁波,速度为光速。
• 速度探测:通过多普勒效应探测目标与自车的相对运动速度,如需要目标绝对运动速度,则需要整车提供自车运动速度信息输入进行补偿得到。
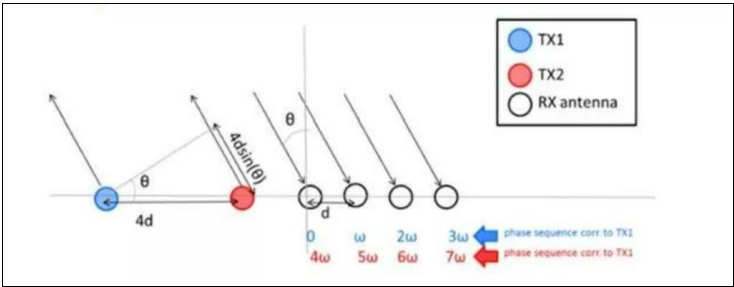
• 方位角探测:通过相位法测角原理,利用不同接收天线阵元间接收回波的相位差计算方位角。
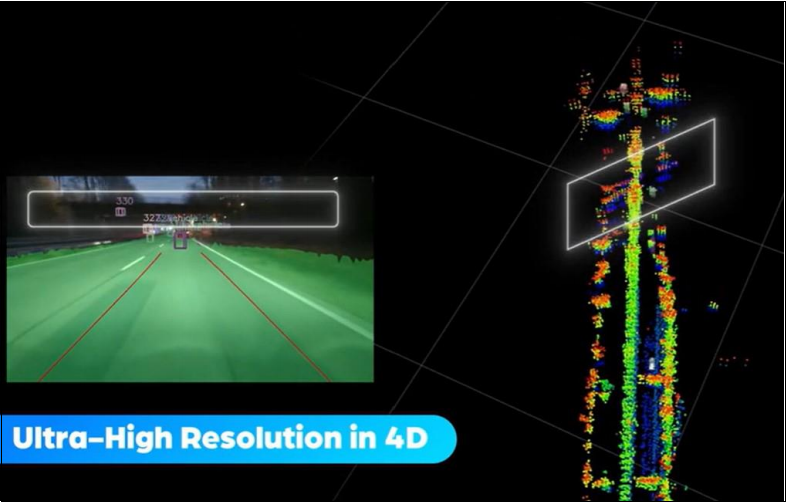
4D
毫米波雷达在此基础上增加高度信息,形成
4维信息输入。避免了以往对于路牌、地面井盖、跨线桥等目标的误识别。

下图可见,4D毫米波雷达识别出了跨线桥,并且在点云上实现了具有高度信息的标注。
从雷达天线排列位置的角度,我们也能辨别4D毫米波雷达与传统毫米波雷达的区别。左下为本次拆解的采埃孚
4D毫米波雷达,右下为来自日本电装的传统
3D
毫米波雷达。
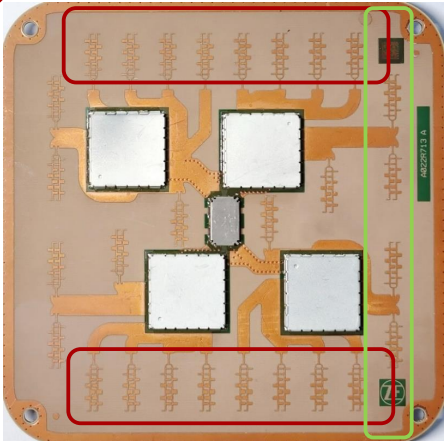

如上文所述,方位角的探测是通过接收天线所接受信号的相位差来进行计算的。水平直线排列的接收天线能够探测水平方向的相位方位角信息(左上图红框),绿色框内的发射天线与红色框的接收阵列通过MIMO技术,在垂直方向上形成虚拟孔径阵列,来实现高度方向上的测量,则可以得到目标的高度信息(左上图绿框)。作为对比,传统毫米波雷达发射天线和接收天线只在水平向上进行天线排列,在高度向上没有布局发射或接收天线,因此无法探测高度信息。
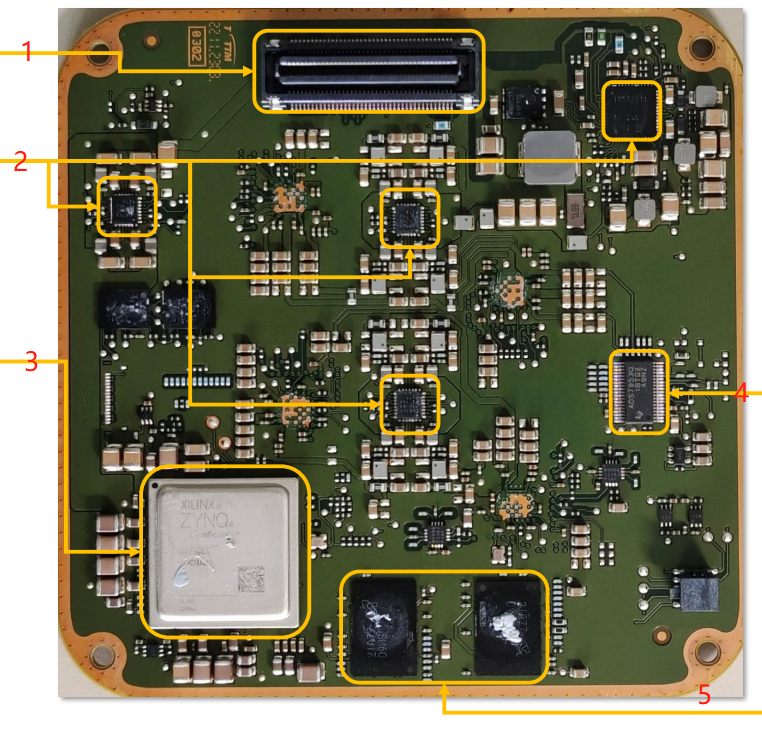
4 发射单元及PCB(反面)
反面也可以分为5个部分 ,如下图数字标识,每个部分分别为:
1.连接器:通过与数字接口板连接,将雷达感知信号输出到接口板,负责数据通讯和供电。
2.电源管理电路PMIC:PMIC是一种广泛应用于各种电子设备内的元器件。主要功能有电压降压或升压,确保为发射单元等用电设备提供稳压电流。
3.处理器:采用赛灵思ZYNQ UltraScale+MPSoC FPGA,具体型号为XAZU3EG,优异的处理性能主要用于4D雷达复杂信号处理。传统毫米波雷达则使用低成本的DSP进行信号处理的方案。NXP也在做类似产品,包括S32R45/41系列。
4.模数转换器ADC:用来控制PMIC模拟信号转换为数字信号,产品来自德州仪器,型号为ADS7953Q。
5.DDR3存储单元:主要用于缓存雷达采集到的数据和中间处理结果。 该雷达采用两块存储单 元,产品来自美光,型号为MT53E128M32D2DS053 AUT:A。
5 数字接口板及结构件
数字接口板及结构件主要有4个部分,分别为CAN FD接口、散热翅片、以太网接口和数字接口板。
1.CAN FD接口:传统毫米波雷达数据量较小,以
20Hz频率估计,数据量约为数十
kbps
,
CAN FD最高支持
5Mbps,足以支持其数据传输需求。
2.散热翅片:4D毫米波雷达较大的功率使得其拥有较大的发热量,结构件背面的散热翅片帮助散热,降低其工作温度。
3.以太网接口:4D毫米波雷达点云数量大幅提升,达到数百甚至上千点云量,以太网的高数据传输速率得以支持其传输需求。
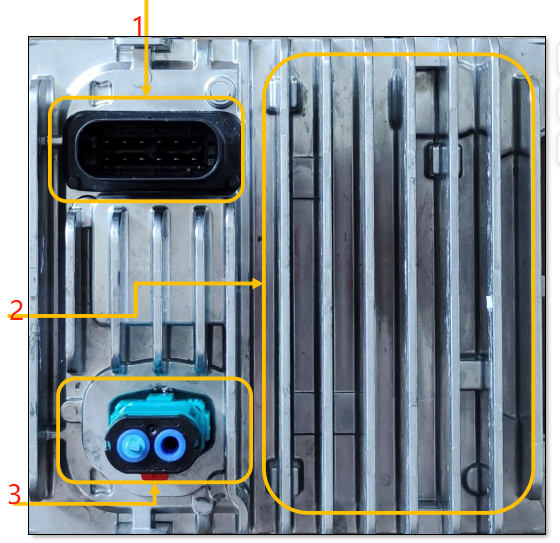
4.数字接口板:此电路板负责与雷达与整车域控信号及电源进行适配及转接。

6 4D毫米波雷达产品现状和进展
4D毫米波雷达虽然还没有大规模使用,但是目前已有厂商推出各自的产品逐鹿中原,占领市场,包括华域汽车、福瑞泰克、经纬恒润、森思泰克、纳瓦电子、赛恩领动、行易道、楚航科技等,但都前期产品导入,未来随着技术成熟度进一步提高,有望能逐渐挤占传统3D雷达市场份额。
|
厂商
|
部分型号
|
型号产品信息
|
|
华域汽车
|
LRR30
、
LRR40
|
公司
LRR30
采用
2
片
MMIC
级联,具备
6
路发射和
8
路接收通道,最多可以输出
1024
点
4D
点云,能够追踪
64
个目标,最远探测距离达
300m
。
公司
LRR40
采用
4
片级联,具备
12
路发射和
16
路接收通道,最多可以输出
3072
点
4D
点云,能够追踪
128
个目标,最远探测距离达
350m
。
公司
4D
毫米波雷达产品已实现对友道智途相关项目的小批量供货。
|
|
福瑞泰克
|
FVR40
|
公司自主研发的成像毫米波雷达产品
FVR40
已获得国内多个车企定点,相关产品已进入量产交付阶段,预计
2023
第一季度完成上车搭载。
FVR40角分辨率和俯仰角分辨率都小于
1
°,探测距离超过
300
米,速度分辨率小于
0.1m/s
能够区分出多个目标特征。
|
|
经纬恒润
|
/ |
公司
4D
毫米波雷达在研发过程中,公司正在积极拓展客户。
2021
年公司和
Arbe
在
4D
毫米波雷达技术方面达成战略合作,如有订单需求公司会向
Arbe采购芯片,目前双方合作顺利。公司通过扩展
MIMO
体制的发射和接收通道数,构建了
48
路发射和
48路接收通道,大大提升雷达信息获取能力,雷达探测距离达到350m
,可实现方位向
1
°和俯仰向
1.5
°的真实孔径分辨率。
|
|
森斯泰克
|
STA77-6
、
STA77-8
|
公司
2
片级联
4D
成像雷达
STA77-6
量产车型
——
理想
L7
量产上市。采用
6
发
8
收,
48
虚拟通道,作用距离
300
米,方位角分别率
2
°。
公司
4
片级联
4D
成像雷达
STA77-8
已搭载国内一线主机厂主打车型量产上市。采用
12
发
16
收,
192
虚拟通道,作用距离
350
米,方位角分别率
0.7
°。
|
|
威孚高科
|
/ |
公司
4D
毫米波雷达产品目前处于市场应用快速发展阶段,已获取干线物流定点项目。
|
|
纳瓦电子
|
NOVA77G-4D-S
、
NOVA77G-4D-IR
|
公司共规划了两款成像雷达产品,一款是
6
发
8
收,既可作为角雷达也可以作为前向雷达,一款是
12
发
16
收,主要瞄准前向雷达
.
纳瓦电子
6
发
8收成像雷达最远探测距离可达
320m
,距离分辨率为
0.35m
,
3dB
水平波束宽度小于
1.6
°,方位角精度±
0.1
°,
3dB
俯仰面波束宽度小于
2.4
°,俯仰角精度±
0.2
°
|
|
弗迪科技
|
公司今年
4D
成像雷达、智能车门雷达、舱内活体检测雷达也会陆续量产。
|
|
|
赛恩领动
|
SIR-4K
|
公司发布了旗下首款产品
SIR-4K
,该产品最远探测距离
400
米,角分辨率
0.5
度(水平)
x 1
度(垂直),较传统毫米波雷达提升了
10
倍。产品具备
192个虚拟通道,可输出
4096
个点云。
|
|
保隆科技
|
/ |
公司自
2021
年底开始布局
4D
毫米波雷达研发,目前已进入优化调试阶段,预计今年
8
月份会对外开展客户推广,
2024
年一季度进入初步量产。
|
|
几何伙伴
|
/ |
公司自主研发的
4D
成像雷达,已经具有目标跟踪定位、可行驶区域检测以及自动泊车等能力。
|
|
楚航科技
|
/ |
公司宣布获得苇渡科技量产定点项目,将为苇渡科技首款纯正向研发的纯电智能重卡高配车型提供
4D
成像毫米波雷达,将在
024
年量产交付及落地应用。
|
|
行易道
|
ALRR300
|
公司
ALRR300
基于双片级联硬件
,
采用领先的稀疏信号成像技术
,
突破硬件的限制
,
实现了水平和俯仰角分辨率小于
1
°。
|