1959年由Widrow和Hoff提出了最小均方(Least Mean Square,LMS)算法,LMS基于维纳滤波理论,采用瞬时值估计梯度矢量的算法,通过最小化误差信号的能量来更新自适应滤波器权值系数。
设计一个N 阶滤波器,它的参数为w(n),则滤波器输出为

期望输出为d(n),则误差信号可以定义为:
![]()
我们的目标就是将误差e(n)最小化,采用最小均方误差(MMSE )准则,最小化目标函数:J(w)

计算目标函数J(w)对w的导数,令导数为0:

则滤波器系数的更新公式可以写为:
![]()
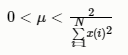
上式中的μ为步长因子。μ值越大,算法收敛越快,但稳态误差也越大;μ值越小,算法收敛越慢,但稳态误差也越小。为保证算法稳态收敛,应使μ在以下范围取值:
- 优点:算法简单,易于实现,算法复杂度低(LMS<RLS),能够抑制旁瓣效应
- 缺点:
- 收敛速率较慢(LMS<RLS),因为LMS滤波器系数更新是逐点的(每来一个新的x(n)和d(n),滤波器系数就更新一次),每一次采样点梯度的估计对于真实梯度会存在误差,导致滤波器系数的每次更新不会严格按照真实梯度方向更新,而是有一定的偏差
- 跟踪性能较差,并且随着滤波器阶数(步长参数)升高,系统的稳定性下降
- LMS要求不同时刻的输入向量x(n)线性无关——LMS 的独立性假设。如果输入信号存在相关性,会导致前一次迭代产生的梯度噪声传播到下一次迭代,造成误差的反复传播,收敛速度变慢,跟踪性能变差。
所以,理论上,LMS 算法对白噪声的效果最好。为了降低输入信号的相关性,出现了一类“解相关LMS”算法。
在现实场景中,常常会遇到以下两种情况:
一、我们往往是无法事先得到期望信号(干净信号),假如我们已经得到了干净信号了,那么我们干嘛还要滤波呢。因此,在仅知道带噪信号:这种情况下,带噪信号作为参考信号,然后对带噪信号进行延迟处理,延迟的信号作为输入信号。这样做的目的是假定在延迟的时间段内,信号仍是相关的,但噪声却不相关。通过去相关来去除噪声分量,一次延迟的时间需要设置合理,如自适应线谱增强器(ALE)。
二、我们已知带噪信号和噪声,可以把带噪信号作为输入信号,噪声为参考信号。
MATLAB代码如下:
function [e, y, w] = myLMS(d, x, mu, M)
% Inputs:
% d - 麦克风语音
% x - 远端语音
% mu - 步长,0.05
% M - 滤波器阶数,也称为抽头数
%
% Outputs:
% e - 输出误差,近端语音估计
% y - 输出系数,远端回声估计
% w - 滤波器参数
d_length = length(d);
if (d_length <= M)
print('error: 信号长度小于滤波器阶数!');
return;
end
if (d_length ~= length(x))
print('error: 输入信号和参考信号长度不同!');
return;
end
xx = zeros(M,1);
w1 = zeros(M,1); % 滤波器权重
y = zeros(d_length,1); % 远端回声估计
e = zeros(d_length,1); % 近端语音估计
% for n = 1:Ns
% xx = [xx(2:M);x(n)]; % 纵向拼接
% xx(2~40)+x(1)-->xx(2~40)+x(2)-->xx(2~40)+x(3)...
% y(n) = w1' * xx; % 远端回声估计(40,1)'*(40,1)=1; (73113,1)
% e(n) = d(n) - y(n); % 近端语音估计
% w1 = w1 + mu * e(n) * xx; % (40,1)
% w(:,n) = w1; % (40, 73113)
% end
% 和上面类似
for n = M:d_length
xx = x(n:-1:n-M+1); % 纵向拼接 (40~1)-->(41~2)-->(42~3)....
y(n) = w1' * xx; % 远端回声估计 (40,1)'*(40,1)=1; (73113,1)
e(n) = d(n) - y(n); % 近端语音估计
w1 = w1 + mu * e(n) * xx; % (40,1)
w(:,n) = w1; % (40, 73113)
end
end
参考链接: