目录
一、理论基础
自适应线性滤波器是一种参数可自适应调整的有限冲激响应(FIR)数字滤波器,具有非递归结构形式。因为它的分析和实现比较简单,所以在大多数自适应信号处理系统中得到了广泛应用。自适应滤波器实际上是一种能够自动调整本身参数的特殊维纳滤波器,它能够在工作过程中逐步“了解”或估计出所需的统计特性,并以此为依据自动调整自身的参数,以达到最佳滤波效果。一旦输入信号的统计特性发生变化,它又能够跟踪这种变化,自动调整参数,使滤波器性能重新达到最佳。本文介绍了自适应滤波器的基本原理,用LMS自适应算法来仿真,得到LMS算法在自适应滤波中的收敛特性。
自适应滤波是数字信号处理领域的一种重要技术,其可以根据信号特征自动调整滤波器参数,从而提高滤波效果。其中,LMS算法是应用最为广泛的自适应滤波算法之一,其可以快速地收敛,并且具有较好的稳定性和适应性。本文将详细介绍基于LMS算法的自适应滤波,包括实现步骤、数学公式和应用案例等内容。
1.1、实现步骤
基于LMS算法的自适应滤波主要分为以下几个步骤:
确定滤波器模型:自适应滤波器的核心是滤波器模型,其可以根据待滤波信号的特征进行设计。常用的滤波器模型有FIR和IIR两种,其中,FIR滤波器具有线性相位和稳定性等优点,因此应用最为广泛。
初始化滤波器参数:在开始自适应滤波之前,需要对滤波器参数进行初始化。通常将滤波器的初始值设置为0或者随机值。
采集待滤波信号:自适应滤波器需要根据待滤波信号的特征进行调整,因此需要先采集待滤波信号,并将其作为输入信号送入滤波器。
计算估计信号:根据滤波器参数和输入信号计算估计信号,即滤波器输出信号的预测值。通常采用卷积运算或者滤波器系数加权和的方式进行计算。
计算误差信号:将估计信号与实际输出信号之间的差值作为误差信号,用于更新滤波器参数。
更新滤波器参数:根据误差信号和输入信号的相关性来更新滤波器参数,使其可以更好地适应信号特征。常用的更新算法有LMS算法和RLS算法等。
重复以上步骤:通过多次迭代,不断更新滤波器参数,直到滤波器输出信号的误差达到预设的要求为止。
1.2、数学公式
基于LMS算法的自适应滤波的数学公式如下:
FIR滤波器的输出信号y(n)和输入信号x(n)之间的关系可以表示为:
$$ y(n)=\sum_{i=0}^{N-1}h(i)x(n-i) $$
其中,h(i)表示滤波器的系数,N表示滤波器的阶数。
LMS算法
LMS算法的更新公式如下:
$$ h(n+1)=h(n)+\mu e(n)x(n) $$
其中,h(n)表示滤波器参数向量,mu表示步长因子,e(n)表示误差信号,x(n)表示输入信号。
误差信号e(n)可以表示为:
$$ e(n)=d(n)-y(n) $$
其中,d(n)表示实际输出信号。
1.3、应用案例
基于LMS算法的自适应滤波在信号处理、通信系统、控制系统等领域得到了广泛的应用。例如,可以将其应用于语音信号去噪、图像信号增强等方面,以提高信号的质量和可靠性。下面以语音信号去噪为例,介绍基于LMS算法的自适应滤波的应用。
语音信号通常受到环境噪声的干扰,这会影响语音信号的质量和可识别性。因此,需要对语音信号进行去噪处理。基于LMS算法的自适应滤波可以根据语音信号的特征进行自动调整,从而提高去噪效果。
具体步骤如下:
采集语音信号:首先需要采集待处理的语音信号,并将其作为输入信号送入自适应滤波器。
初始化滤波器参数:在开始自适应滤波之前,需要对滤波器参数进行初始化。通常将滤波器的初始值设置为0或者随机值。
添加噪声信号:为了模拟实际环境中的噪声干扰,需要向语音信号中添加一定的噪声信号。
计算估计信号:根据滤波器参数和输入信号计算估计信号,即滤波器输出信号的预测值。通常采用卷积运算或者滤波器系数加权和的方式进行计算。
计算误差信号:将估计信号与实际输出信号之间的差值作为误差信号,用于更新滤波器参数。
更新滤波器参数:根据误差信号和输入信号的相关性来更新滤波器参数,使其可以更好地适应语音信号的特征。通常采用LMS算法进行参数更新。
重复以上步骤:通过多次迭代,不断更新滤波器参数,直到语音信号的去噪效果达到预设的要求为止。
通过基于LMS算法的自适应滤波处理,可以有效地去除语音信号中的噪声干扰,提高语音信号的质量和可识别性。
1.4、总结
基于LMS算法的自适应滤波是一种重要的数字信号处理技术,其可以根据信号特征自动调整滤波器参数,从而提高滤波效果。本文介绍了基于LMS算法的自适应滤波的实现步骤、数学公式和应用案例等内容。在实际应用中,需要根据具体问题的特点选择适当的滤波器模型和参数,以达到最佳的滤波效果。
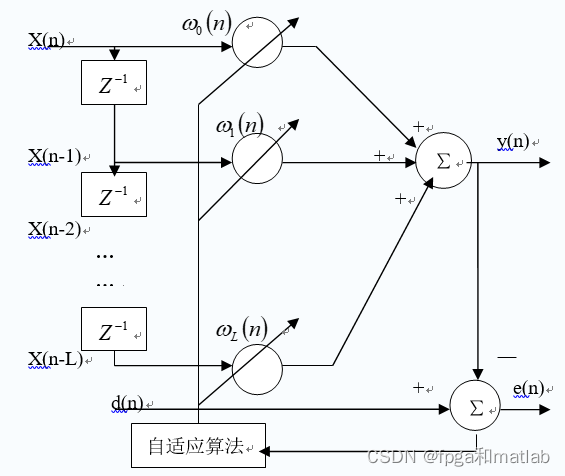
综上所述,LMS的基本结构如下图所示:
二、核心程序
.......................................................
u=0.001;
for q=1:g
t=1:N;
a=1;
s=a*sin(0.5*pi*t); % 输入单频信号s
figure(1);
plot(t,real(s)); % 信号s时域波形
title('信号s时域波形');
xlabel('n');
ylabel('s');
axis([0,N,-a-1,a+1]);
xn=awgn(s,3); % 加入均值为零的高斯白噪声,信噪比为3dB
% 设置初值
y=zeros(1,N); % 输出信号y
y(1:k)=xn(1:k); % 将输入信号xn的前k个值作为输出y的前k个值
w=zeros(1,k); % 设置抽头加权初值
e=zeros(1,N); % 误差信号
% 用LMS算法迭代滤波
for i=(k+1):N
XN=xn((i-k+1):(i));
y(i)=w*XN';
e(i)=s(i)-y(i);
w=w+u*e(i)*XN;
end
pp(q,:)=(e(k+1:N)).^2;
end
for b=1:N-k
bi(b)=sum(pp(:,b))/g; % 求误差的统计平均
end
figure(2); % 算法收敛曲线
t=1:N-k;
plot(t,bi);
hold off % 将每次循环的图形显示结果保存下来
up2151三、仿真结论



