现在,编写一个路径规划算法来搜索路径,并将对象从新的开始姿势移动到新的目标姿势。试着改进规划,让机器人动作尽可能地快。
4.项目提示!!
在KUKA项目中编写的路径规划算法与经典路径规划算法之间有两个主要区别
1)经典路径规划算法假设已知地图,其中障碍物和自由空间的位置已知。然而,在库卡的项目迷宫是未知的!所拥有的唯一信息是地图尺寸,开始姿势和目标姿势。
2)经典路径规划算法仅假设位置变化。机器人的朝向角度保持固定。然而,在KUKA项目中,需要改变夹持器的位置和方向,才能在迷宫中移动。
将关于经典路径规划算法的知识应用到KUKA项目
1)由于迷宫是未知的,必须执行“边走边搜索”技术。使用地图维度,可以用矩阵形式表示迷宫。从开始的姿势开始搜索,识别一个单元格是空闲的还是被占用的,在搜索的时候更新矩阵,直到达到目标姿势。
2)定义一组可以在迷宫中移动的角度。要更新矩阵中单元格的状态(已占用或空闲),可以更改夹持器的方向角度,并检查是否能够以每个预定义的角度向单元格移动。如果任何预定义的角度返回有效响应,单元格将被更新为空闲。相反,如果所有预定义的角度返回无效响应,则单元格将被更新为已占用。
可视化例子
这是一个如何用矩阵形式表示 Maze 1(迷宫1)练习阶段的例子。提醒一下,这是 Maze 1(迷宫1)的起点和目标配置:
<!-- Start 2D pose -->
<arg name="start_pos_x" default="0.38" />
<arg name="start_pos_y" default="0.0" />
<arg name="start_pos_theta" default="0.0" />
<!-- Goal 2D pose -->
<arg name="goal_pos_x" default="-0.37" />
<arg name="goal_pos_y" default="0.5" />
<arg name="goal_pos_theta" default="0.0" />
--将迷宫(1.2mx1.6m)转换成矩阵大小(12x16)。在这里使用非常小的分辨率进行演示。需要测试哪种分辨率最适合。
--将迷宫1的开始和目标姿势转换为矩阵坐标:
-起始姿态(0.38,0,0)到矩阵坐标(9,8,0)
-目标姿态(-0.37,0.5,0)到矩阵坐标(2,13,0)
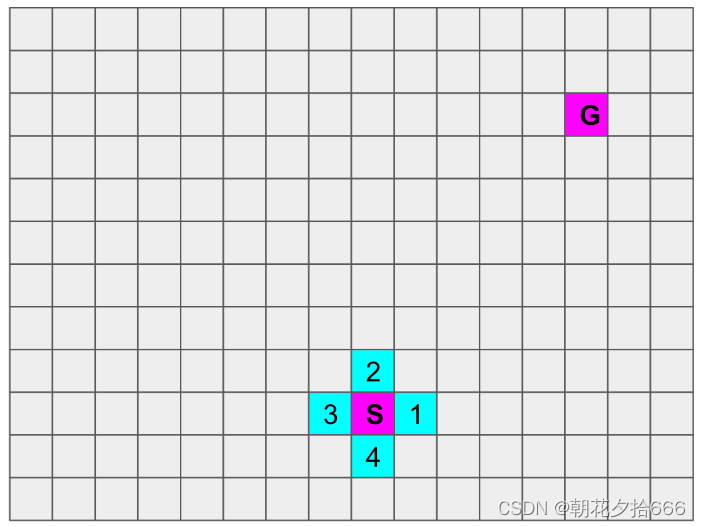
现在,已经将世界坐标转换为矩阵坐标,执行搜索技术,从S单元格开始,然后更新相邻单元格的状态。
更新相邻Cell 1的状态:
定义一组弧度角度来导航迷宫:[0,0.78,1.57]
--(9,8,0)到(9,9,0)有效还是无效?
--(9, 8,0) 到 (9,9,0.78) 有效还是无效?
--(9, 8,0) 到(9,9,1.57) 有效还是无效?
如果所有这些问题都返回无效答案,单元格1将被认为已占用!
现在,移动到第二个相邻单元格,检查不同角度的移动,并更新矩阵。然后,移动到另一个未被发现的单元格,以此类推,直到建立一个地图并达到目标G。
如何开始搜索和计划?
作为一个好的开始,解决一个简单的问题,开始姿势和目标姿势都在同一条线上。通过保持抓手的角度恒定来寻找通往目标的道路。一旦解决了这个问题,为每个运动方向分配一组角度,就像在前面的视觉例子中看到的那样。

通过保持夹持角度恒定来发现单元格1到4是否被占用或空闲:
--Cell 1 - (9,8,0)到(9,9,0)有效还是无效?
--Cell 2 - (9, 8,0)到 (8,8,0)有效还是无效?
--Cell 3 - (9, 8,0)到 (9, 7,0)有效还是无效?
--Cell 4 - (9, 8,0)到(10,8,0) 有效还是无效?
参考代码:path_planner.py
#! /usr/bin/env python
import rospy
import actionlib
from rll_planning_project.srv import *
from rll_planning_project.msg import *
from geometry_msgs.msg import Pose2D
from heapq import heappush, heappop # for priority queue
import math
import time
class Node:
def __init__(self, x_pos, y_pos, theta_pos, orientation, parent, explored_directions):
#arguments, x_pos, y_pos, theta_pos: 2D pose of node
self.x = x_pos
self.y = y_pos
self.theta = theta_pos
#orientation of node - 0 = horizontal, 1 = vertical
self.orientation = orientation
self.parent = parent
#directions that have been explored [up, right, down, left] - 0=unknown, 1=free, -1=blocked
self.explored = explored_directions[:]
#distance from start node
if parent == None:
self.start_dist = 0
else:
self.start_dist = parent.start_dist + self.distance(parent)+0.17
#score based on distance from start plus heuristic function to goal
self.score = self.start_dist
#direction to explore if node is chosen for exploration
self.best_direction = None
#calculates distance between self and another node
def distance(self, other):
return math.sqrt((other.x-self.x)**2 + (other.y-self.y)**2)
#determine if two instances of Node class are identical
def __eq__(self, other):
if other == None:
return False
else:
return self.__dict__ == other.__dict__
#allow for sorting of nodes based on cost function
def __lt__(self, other):
return self.score < other.score
#update cost score based on distances and explored directions
def update(self, goal, bonus, debug = False):
angle = math.atan2( (goal.y-self.y), (goal.x-self.x) )
if debug:
rospy.loginfo("angle: %f", angle)
#calculate distance to goal for base heuristic score
h = abs(goal.x - self.x) + abs(goal.y - self.y)
#define exploration direction codes by angle
angle_dict = {0:1.570796327, 1:0, 2:-1.570796327, 3:3.141592654}
#take difference between possible exploration directions and angle to goal
for key in angle_dict:
angle_dict[key] = abs(angle-angle_dict[key])
if angle_dict[key] > 3.141592654:
angle_dict[key] = abs(angle_dict[key] - 6.283185307)
#sort direction codes by difference between goal angle and direction angle
order = sorted(angle_dict, key=angle_dict.get)
if debug:
rospy.loginfo("order: " + repr(order))
self.best_direction = None
bonus_applied = False
for n in range(4):
if self.explored[order[n]] == 0 and not bonus_applied:
#determine best direction for exploration
if self.best_direction == None:
self.best_direction = order[n]
bonus_applied = True
if debug:
rospy.loginfo("bonus: %f", n)
#apply bonus to heuristic score
if order[n]==0 or order[n]==2:
if abs(goal.y-self.y) < 0.028 or (self.distance(goal) < 0.11 and self.orientation == goal.orientation):
h = h*bonus[4]
else:
h = h*bonus[n]
if order[n]==1 or order[n]==3:
if abs(goal.x-self.x) < 0.028 or (self.distance(goal) < 0.11 and self.orientation == goal.orientation):
h = h*bonus[4]
else:
h = h*bonus[n]
self.score = self.start_dist + h
#if node has no remaining directions to explore, move to bottom of list
if self.best_direction == None:
self.score += 1000
def explore_linear(node_list, parent, direction, goal, resolution, bonus, h_angle, v_angle, size, check_srv):
if direction == 0:
x_move = 0.0
y_move = 1.0
explored_dir = 2
parallel_orientation = 1
perpendicular_orientation = 0
perpendicular_check_goal = goal.x
perpendicular_check_parent = parent.x
parallel_check_goal = goal.y
parallel_check_parent = parent.y
parallel_theta = v_angle
perpendicular_theta = h_angle
mid_explored_plus = [0, 0, 1, -1]
mid_explored_minus = [0, -1, 1, 0]
mid_explored_both = [0, 0, 1, 0]
mid_explored_stop = [0, -1, 1, -1]
end_explored = [-1, 0, 1, 0]
elif direction == 1:
x_move = 1.0
y_move = 0.0
explored_dir = 3
parallel_orientation = 0
perpendicular_orientation = 1
perpendicular_check_goal = goal.y
perpendicular_check_parent = parent.y
parallel_check_goal = goal.x
parallel_check_parent = parent.x
parallel_theta = h_angle
perpendicular_theta = v_angle
mid_explored_plus = [0, 0, -1, 1]
mid_explored_minus = [-1, 0, 0, 1]
mid_explored_both = [0, 0, 0, 1]
mid_explored_stop = [-1, 0, -1, 1]
end_explored = [0, -1, 0, 1]
elif direction == 2:
x_move = 0.0
y_move = -1.0
explored_dir = 0
parallel_orientation = 1
perpendicular_orientation = 0
perpendicular_check_goal = goal.x
perpendicular_check_parent = parent.x
parallel_check_goal = goal.y
parallel_check_parent = parent.y
parallel_theta = v_angle
perpendicular_theta = h_angle
mid_explored_plus = [1, 0, 0, -1]
mid_explored_minus = [1, -1, 0, 0]
mid_explored_both = [1, 0, 0, 0]
mid_explored_stop = [1, -1, 0, -1]
end_explored = [-1, 0, -1, 0]
elif direction == 3:
x_move = -1.0
y_move = 0.0
explored_dir = 1
parallel_orientation = 0
perpendicular_orientation = 1
perpendicular_check_goal = goal.y
perpendicular_check_parent = parent.y
parallel_check_goal = goal.x
parallel_check_parent = parent.x
parallel_theta = h_angle
perpendicular_theta = v_angle
mid_explored_plus = [0, 1, -1, 0]
mid_explored_minus = [-1, 1, 0, 0]
mid_explored_both = [0, 1, 0, 0]
mid_explored_stop = [-1, 1, -1, 0]
end_explored = [0, -1, 0, -1]
#Pose2D objects for test points
check_fwd_a = Pose2D()
check_fwd_b = Pose2D()
check_plus_a = Pose2D()
check_plus_b = Pose2D()
check_minus_a = Pose2D()
check_minus_b = Pose2D()
#if goal lies along direction of exploration, check if path to goal is clear
if abs(perpendicular_check_goal-perpendicular_check_parent) < size*0.06 and goal.orientation == parent.orientation:
check_fwd_a.x, check_fwd_a.y, check_fwd_a.theta= parent.x, parent.y, parent.theta
check_fwd_b.x, check_fwd_b.y, check_fwd_b.theta= goal.x, goal.y, goal.theta
resp = check_srv(check_fwd_a, check_fwd_b)
#rospy.loginfo("Goal check:" + repr(resp.valid))
if resp.valid:
goal.parent = parent
return goal
#if exploration direction is towards the goal, check point orthogonal to goal
check_ortho = False
if direction == 1 or direction == 0:
if goal.orientation != parent.orientation and parallel_check_goal > parallel_check_parent:
check_ortho = True
elif direction == 3 or direction == 2:
if goal.orientation != parent.orientation and parallel_check_goal < parallel_check_parent:
check_ortho = True
offset = size*0.025
if direction == 0 or direction == 2:
check_plus_a.x = parent.x + offset
check_plus_b.x = check_plus_a.x + 0.006
check_minus_a.x = parent.x - offset
check_minus_b.x = check_minus_a.x - 0.006
check_plus_a.y = parent.y
check_plus_b.y = parent.y
check_minus_a.y = parent.y
check_minus_b.y = parent.y
elif direction == 1 or direction == 3:
check_plus_a.x = parent.x
check_plus_b.x = parent.x
check_minus_a.x = parent.x
check_minus_b.x = parent.x
check_plus_a.y = parent.y + offset
check_plus_b.y = check_plus_a.y + 0.006
check_minus_a.y = parent.y - offset
check_minus_b.y = check_minus_a.y - 0.006
check_plus_a.theta = perpendicular_theta
check_plus_b.theta = perpendicular_theta
check_minus_a.theta = perpendicular_theta
check_minus_b.theta = perpendicular_theta
last_node = parent
check_fwd_a.theta = parent.theta
check_fwd_b.theta = parent.theta
check_fwd_b.x = parent.x + x_move * resolution
check_fwd_b.y = parent.y + y_move * resolution
check_fwd_a.x = check_fwd_b.x - x_move * 0.006
check_fwd_a.y = check_fwd_b.y - y_move * 0.006
check_plus_a.x += x_move * resolution
check_plus_b.x += x_move * resolution
check_minus_a.x += x_move * resolution
check_minus_b.x += x_move * resolution
check_plus_a.y += y_move * resolution
check_plus_b.y += y_move * resolution
check_minus_a.y += y_move * resolution
check_minus_b.y += y_move * resolution
last_check = False
ortho_intersect = False
while(True):
#check forward area in direction of exploration
resp = check_srv(check_fwd_a, check_fwd_b)
if resp.valid:
check_fwd_a.x += x_move * resolution
check_fwd_a.y += y_move * resolution
check_fwd_b.x += x_move * resolution
check_fwd_b.y += y_move * resolution
check_plus_a.x += x_move * resolution
check_plus_b.x += x_move * resolution
check_minus_a.x += x_move * resolution
check_minus_b.x += x_move * resolution
check_plus_a.y += y_move * resolution
check_plus_b.y += y_move * resolution
check_minus_a.y += y_move * resolution
check_minus_b.y += y_move * resolution
else:
#if corridor has ended, determine if intersection at end
found_intersection = False
end_x = check_fwd_a.x
end_y = check_fwd_a.y
for i in range(15, -15, -5):
if not found_intersection:
check_fwd_a.x = end_x + x_move*i*0.001
check_fwd_a.y = end_y + y_move*i*0.001
check_fwd_b.x = check_fwd_a.x + x_move*0.01
check_fwd_b.y = check_fwd_a.y + y_move*0.01
check_fwd_a.theta = parallel_theta
check_fwd_b.theta = perpendicular_theta
resp = check_srv(check_fwd_a, check_fwd_b)
if resp.valid:
new = Node(check_fwd_a.x, check_fwd_a.y, check_fwd_a.theta, parallel_orientation, parent, [1, 1, 1, 1])
new.update(goal, bonus)
node_list.append(new)
new2 = Node(check_fwd_b.x, check_fwd_b.y, check_fwd_b.theta, perpendicular_orientation, new, end_explored)
new2.update(goal, bonus)
node_list.append(new2)
found_intersection = True
last_node.explored[direction] = -1
last_node.update(goal, bonus)
break
if check_ortho:
if direction == 0 or direction == 2:
if abs(check_plus_b.y-parallel_check_goal) < 1.5*resolution:
check_fwd_b.y = goal.y
check_fwd_a.y = check_fwd_b.y - y_move * 0.006
check_plus_a.y = goal.y
check_plus_b.y = goal.y
check_minus_a.y = goal.y
check_minus_b.y = goal.y
elif direction == 1 or direction == 3:
if abs(check_plus_b.x-parallel_check_goal) < 1.5*resolution:
check_fwd_b.x = goal.x
check_fwd_a.x = check_fwd_b.x - x_move * 0.006
check_plus_a.x = goal.x
check_plus_b.x = goal.x
check_minus_a.x = goal.x
check_minus_b.x = goal.x
check_ortho = False
ortho_intersect = True
resp_plus = check_srv(check_plus_a, check_plus_b)
resp_minus = check_srv(check_minus_a, check_minus_b)
if resp_plus.valid and resp_minus.valid:
new = Node(check_fwd_b.x, check_fwd_b.y, check_fwd_b.theta, parallel_orientation, parent, mid_explored_both)
new.update(goal, bonus)
node_list.append(new)
last_node.explored[direction] = 1
last_node.update(goal, bonus)
last_node = new
last_check = True
elif resp_plus.valid:
new = Node(check_fwd_b.x, check_fwd_b.y, check_fwd_b.theta, parallel_orientation, parent, mid_explored_plus)
new.update(goal, bonus)
node_list.append(new)
last_node.explored[direction] = 1
last_node.update(goal, bonus)
last_node = new
last_check = True
elif resp_minus.valid:
new = Node(check_fwd_b.x, check_fwd_b.y, check_fwd_b.theta, parallel_orientation, parent, mid_explored_minus)
new.update(goal, bonus)
node_list.append(new)
last_node.explored[direction] = 1
last_node.update(goal, bonus)
last_node = new
last_check = True
elif last_check == True:
if check_ortho:
if direction == 0 and check_plus_a.y-goal.y > 3.0*resolution:
break
if direction == 1 and check_plus_a.x-goal.x > 3.0*resolution:
break
if direction == 2 and goal.y-check_plus_a.y > 3.0*resolution:
break
if direction == 3 and goal.x-check_plus_a.x > 3.0*resolution:
break
advance = 2.0*resolution
check_fwd_a.x += x_move * advance
check_fwd_a.y += y_move * advance
check_fwd_b.x += x_move * advance
check_fwd_b.y += y_move * advance
check_plus_a.x += x_move * advance
check_plus_b.x += x_move * advance
check_minus_a.x += x_move * advance
check_minus_b.x += x_move * advance
check_plus_a.y += y_move * advance
check_plus_b.y += y_move * advance
check_minus_a.y += y_move * advance
check_minus_b.y += y_move * advance
last_check = False
else:
if check_ortho:
if direction == 0 and check_plus_a.y-goal.y > size*.25:
new = Node(check_fwd_b.x, check_fwd_b.y, check_fwd_b.theta, parallel_orientation, parent, mid_explored_stop)
new.update(goal, bonus)
last_node.explored[direction] = 1
last_node.update(goal, bonus)
node_list.append(new)
break
if direction == 1 and check_plus_a.x-goal.x > size*.25:
new = Node(check_fwd_b.x, check_fwd_b.y, check_fwd_b.theta, parallel_orientation, parent, mid_explored_stop)
new.update(goal, bonus)
last_node.explored[direction] = 1
last_node.update(goal, bonus)
node_list.append(new)
break
if direction == 2 and goal.y-check_plus_a.y > size*.25:
new = Node(check_fwd_b.x, check_fwd_b.y, check_fwd_b.theta, parallel_orientation, parent, mid_explored_stop)
new.update(goal, bonus)
last_node.explored[direction] = 1
last_node.update(goal, bonus)
node_list.append(new)
break
if direction == 3 and goal.x-check_plus_a.x > size*.25:
new = Node(check_fwd_b.x, check_fwd_b.y, check_fwd_b.theta, parallel_orientation, parent, mid_explored_stop)
new.update(goal, bonus)
last_node.explored[direction] = 1
last_node.update(goal, bonus)
node_list.append(new)
break
last_check = False
#rospy.loginfo("stopped at: %f, %f", check_fwd_b.x, check_fwd_b.y)
return None
def explore_perpendicular(node_list, parent, direction, goal, resolution, bonus, h_angle, v_angle, size, check_srv):
if direction == 0:
x_move = 0.0
y_move = 1.0
explored_dir = 2
new_orientation = 1
new_theta = v_angle
new_explored = [0, -1, 1, -1]
elif direction == 1:
x_move = 1.0
y_move = 0.0
explored_dir = 3
new_orientation = 0
new_theta = h_angle
new_explored = [-1, 0, -1, 1]
elif direction == 2:
x_move = 0.0
y_move = -1.0
explored_dir = 0
new_orientation = 1
new_theta = v_angle
new_explored = [1, -1, 0,-1]
elif direction == 3:
x_move = -1.0
y_move = 0.0
explored_dir = 1
new_orientation = 0
new_theta = h_angle
new_explored = [-1, 1, -1, 0]
check_a = Pose2D()
check_b = Pose2D()
check_a.x = parent.x
check_a.y = parent.y
check_a.theta = parent.theta
check_b.x = parent.x + 0.01*x_move
check_b.y = parent.y + 0.01*y_move
check_b.theta = new_theta
resp = check_srv(check_a, check_b)
if not resp.valid:
check_b.x = parent.x + 0.04*x_move
check_b.y = parent.y + 0.04*y_move
check_b.theta = new_theta
resp = check_srv(check_a, check_b)
if not resp.valid:
parent.explored[direction] = -1
parent.update(goal, bonus)
return None
parent.explored[direction] = 1
new = Node(check_b.x, check_b.y, new_theta, new_orientation, parent, new_explored)
new.update(goal, bonus)
parent.update(goal, bonus)
for point in list(node_list):
if parent.distance(point) < 2.1*resolution:
if (parent.explored == point.explored and point.start_dist > 0.001) and (parent.parent == point.parent and parent.orientation == point.orientation):
node_list.remove(point)
node_list.append(new)
if new.orientation == goal.orientation and new.distance(goal) < size*0.1:
check_a.x = new.x
check_a.y = new.y
check_a.theta = new.theta
check_b.x = goal.x
check_b.y = goal.y
check_b.theta = goal.theta
resp = check_srv(check_a, check_b)
#rospy.loginfo("Goal check:" + repr(resp.valid))
if resp.valid:
goal.parent = new
return goal
return None
def generate_path(xStart, yStart, tStart, xGoal, yGoal, tGoal, map_width, map_length, check_srv):
search_resolution = 0.018
#bonus to heuristic score based on unexplored directions relative to angle to goal
bonus = [0.75, 1.0, 3.0, 4.0, 0.4]
size = min(map_width, map_length)
h_angle = 1.570796327
v_angle = 0.0
node_list = []
if abs(math.sin(tStart)) < .7071:
start_direction = 1
if math.cos(tStart) < 0.0:
v_angle = 3.141592654
else:
v_angle = 0.0
else:
start_direction = 0
if math.sin(tStart) < 0.0:
h_angle = 4.71
else:
h_angle = 1.570796327
if abs(math.sin(tGoal)) < .7071:
goal_direction = 1
if math.cos(tGoal) < 0.0:
v_angle = 3.141592654
else:
v_angle = 0.0
else:
goal_direction = 0
if math.sin(tGoal) < 0.0:
h_angle = 4.71
else:
h_angle = 1.570796327
# rospy.loginfo("h_angle %f,", h_angle)
# rospy.loginfo("v_angle %f,", v_angle)
start_node = Node(xStart, yStart, tStart, start_direction, None, [0, 0, 0, 0])
node_list.append(start_node)
goal_node = Node(xGoal, yGoal, tGoal, goal_direction, None, [1, 1, 1, 1])
goal_node.score = 10000
node_list.append(goal_node)
start_node.update(goal_node, bonus)
goal = None
#for i in range(2):
while(True):
node_list.sort()
best_node = node_list[0]
explore_dir = best_node.best_direction
if explore_dir == None:
rospy.loginfo("Fail.")
break
#rospy.loginfo("point: %f, %f, %f, %f, " + repr(best_node.explored) + ", " + repr(best_node.best_direction), best_node.orientation, best_node.x, best_node.y, best_node.theta)
if explore_dir == 0 or explore_dir == 2:
if best_node.orientation == 1:
#rospy.loginfo("Vertical")
goal = explore_linear(node_list, best_node, explore_dir, goal_node, search_resolution, bonus, h_angle, v_angle, size, check_srv)
else:
#rospy.loginfo("Perpendicular")
goal = explore_perpendicular(node_list, best_node, explore_dir, goal_node, search_resolution, bonus, h_angle, v_angle, size, check_srv)
if explore_dir == 1 or explore_dir == 3:
if best_node.orientation == 0:
#rospy.loginfo("Horizontal")
goal = explore_linear(node_list, best_node, explore_dir, goal_node, search_resolution, bonus, h_angle, v_angle, size, check_srv)
else:
#rospy.loginfo("Perpendicular")
goal = explore_perpendicular(node_list, best_node, explore_dir, goal_node, search_resolution, bonus, h_angle, v_angle, size, check_srv)
if goal != None:
rospy.loginfo("Goal!")
break
if goal == None:
for point in node_list:
rospy.loginfo("point: %f, %f, %f, %f, " + repr(point.explored) + ", " + repr(point.best_direction), point.orientation, point.x, point.y, point.theta)
return None
else:
path = [goal]
next_node = goal.parent
while next_node != start_node:
path.append(next_node)
#rospy.loginfo("results: %f, %f, %f,", next_node.x, next_node.y, next_node.theta)
next_node = next_node.parent
path.reverse()
return path
def plan_to_goal(req):
""" Plan a path from Start to Goal """
pose_start = Pose2D()
pose_goal = Pose2D()
pose_check_start = Pose2D()
pose_check_goal = Pose2D()
pose_move = Pose2D()
rospy.loginfo("Got a planning request")
pose_start = req.start
pose_goal = req.goal
move_srv = rospy.ServiceProxy('move', Move)
check_srv = rospy.ServiceProxy('check_path', CheckPath, persistent=True)
###############################################
# Implement your path planning algorithm here #
###############################################
# Input: map dimensions, start pose, and goal pose
# retrieving input values
map_width = rospy.get_param('~map_width')
map_length = rospy.get_param('~map_length')
xStart, yStart, tStart = pose_start.x, pose_start.y, pose_start.theta
xGoal, yGoal, tGoal = pose_goal.x, pose_goal.y, pose_goal.theta
# printing input values
rospy.loginfo("map dimensions: width=%1.2fm, length=%1.2fm", map_width, map_length)
rospy.loginfo("start pose: x %f, y %f, theta %f", xStart, yStart, tStart)
rospy.loginfo("goal pose: x %f, y %f, theta %f", xGoal, yGoal, tGoal)
#start = time.time()
path = generate_path(xStart, yStart, tStart, xGoal, yGoal, tGoal, map_width, map_length, check_srv)
#end = time.time()
#t = end-start
#rospy.loginfo("time: %f", t)
# Output: movement commands
if path != None:
rospy.loginfo("Valid path")
for point in path:
#rospy.loginfo("point: %f, %f, %f,", point.x, point.y, point.theta)
pose_move.x, pose_move.y, pose_move.theta = point.x, point.y, point.theta
# executing a move command towards the goal pose
resp = move_srv(pose_move)
else:
rospy.loginfo("No path found")
###############################################
# End of Algorithm #
###############################################
class PathPlanner:
def __init__(self):
self.server = actionlib.SimpleActionServer("plan_to_goal", PlanToGoalAction, self.execute, False)
self.server.start()
def execute(self, req):
plan_to_goal(req)
self.server.set_succeeded()
if __name__ == '__main__':
rospy.init_node('path_planner')
server = PathPlanner()
rospy.spin()