基于深度学习的表情识别服务搭建(一)
背景
之前我完成了终端和服务端之间交流的全部内容,接下来我需要完成的是服务端识别线程的功能。完成之后,我们的系统应该就剩下前端和优化工作了
识别服务设计
我们称之为服务,是因为它并不能很好的和我们现有的系统无缝拼接,因为这个模块主要由Python实现,但是我们服务端最多只能是PHP+Java,我们的设计是这个样子的:
- 后台的Java+PHP负责从终端和web端接受音频图片或上传的视频,而识别服务仅仅完成对已有图片的处理
- 后台和识别服务通过网络方式通信,后台将从用户处接受到的文件名发送给识别服务,识别服务打开这些文件,完成识别,并将识别结果以json的格式发送给后台
有了具体框架,我们还需要定义识别服务的功能:
- 找出图片中每一张脸的位置
- 对图片中人脸的朝向进行分析
- 对人脸的表情进行分析
那么我们就清楚了我们如何去实现这一系列功能
实现方式的选择
经过前期组内的研究,人脸识别应该使用caffe,darknet中虽然有相关的网络,但是darknet的输入只能是彩色图片,而人脸表情特征实际上使用黑白图片就能表述清楚,由于对框架了解不够深入,不知如何做出调整,所以我们先使用功能完善,组内熟悉的Caffe完成表情分类
在寻找脸部方位检测方法的时候我们找到了dlib,这个东西其实是挺不错的,有许多功能,包括人脸检测,头部位置检测,鉴于我们不得不使用它,并考虑到组内其他同学调试方便(如果直接使用darknet的话问题会比较有趣,因为组内所有同学中只有我的电脑有独立显卡,而darknet由于不成熟的原因并不支持传统的CPU加速方法,完成一张图片的检测,GPU只需几十毫秒,而CPU需要80秒),我们决定先完全使用dlib+caffe完成一套系统,darknet过一段时间再考虑
总结一下我们的选择:
- 人脸检测:darknet(dlib)
- 头部位置识别:dlib
- 表情分类:caffe
dlib性能验证
经过我们的研究,dlib中人脸检测使用的是图形学方法,这在光线不均匀的情况下效果极差,表现为一下状态:
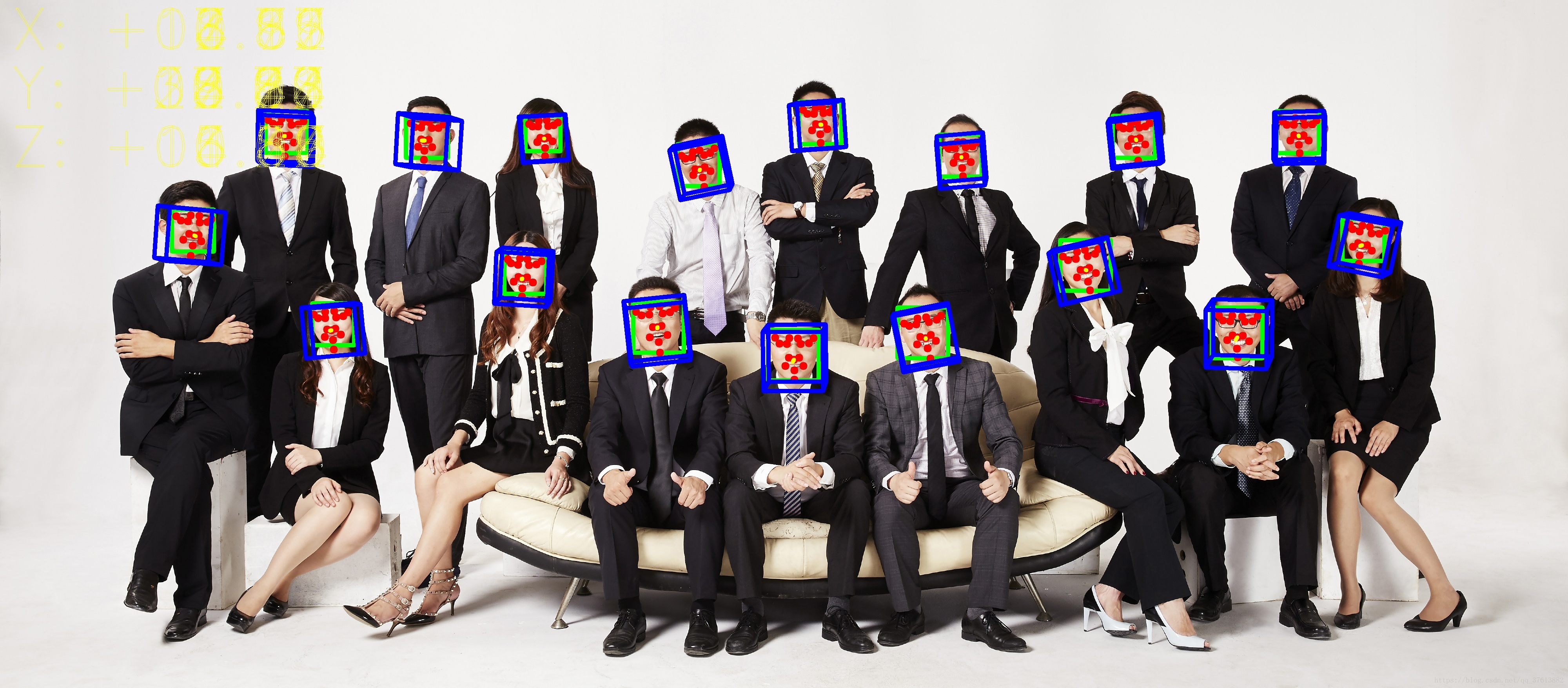

这样可以很明显的看出问题,但是基于深度学习方法的darknet似乎没有这样的烦恼

原本darknet的人脸检测框的没有这么方正,我对框选算法进行了一下修改,具体改动将在后续接入darknet的文章中详细介绍
功能实现
类定义:
class HPD():
# 3D facial model coordinates
landmarks_3d_list = [
np.array([
[0.000, 0.000, 0.000], # Nose tip
[0.000, -8.250, -1.625], # Chin
[-5.625, 4.250, -3.375], # Left eye left corner
[5.625, 4.250, -3.375], # Right eye right corner
[-3.750, -3.750, -3.125], # Left Mouth corner
[3.750, -3.750, -3.125] # Right mouth corner
], dtype=np.double),
np.array([
[0.000000, 0.000000, 6.763430], # 52 nose bottom edge
[6.825897, 6.760612, 4.402142], # 33 left brow left corner
[1.330353, 7.122144, 6.903745], # 29 left brow right corner
[-1.330353, 7.122144, 6.903745], # 34 right brow left corner
[-6.825897, 6.760612, 4.402142], # 38 right brow right corner
[5.311432, 5.485328, 3.987654], # 13 left eye left corner
[1.789930, 5.393625, 4.413414], # 17 left eye right corner
[-1.789930, 5.393625, 4.413414], # 25 right eye left corner
[-5.311432, 5.485328, 3.987654], # 21 right eye right corner
[2.005628, 1.409845, 6.165652], # 55 nose left corner
[-2.005628, 1.409845, 6.165652], # 49 nose right corner
[2.774015, -2.080775, 5.048531], # 43 mouth left corner
[-2.774015, -2.080775, 5.048531], # 39 mouth right corner
[0.000000, -3.116408, 6.097667], # 45 mouth central bottom corner
[0.000000, -7.415691, 4.070434] # 6 chin corner
], dtype=np.double),
np.array([
[0.000000, 0.000000, 6.763430], # 52 nose bottom edge
[5.311432, 5.485328, 3.987654], # 13 left eye left corner
[1.789930, 5.393625, 4.413414], # 17 left eye right corner
[-1.789930, 5.393625, 4.413414], # 25 right eye left corner
[-5.311432, 5.485328, 3.987654] # 21 right eye right corner
], dtype=np.double)
]
# 2d facial landmark list
lm_2d_index_list = [
[30, 8, 36, 45, 48, 54],
[33, 17, 21, 22, 26, 36, 39, 42, 45, 31, 35, 48, 54, 57, 8], # 14 points
[33, 36, 39, 42, 45] # 5 points
]
# caffe 模型的各种路径
caffe_model = 'face/myfacialnet_iter_59000.caffemodel'
caffe_lable = 'face/labels.txt'
caffe_deploy = 'face/deploy.prototxt'
caffe_mean = 'face/mean.binaryproto'
def __init__(self, lm_type=1, predictor="model/shape_predictor_68_face_landmarks.dat", verbose=True):
self.bbox_detector = dlib.get_frontal_face_detector()
self.landmark_predictor = dlib.shape_predictor(predictor)
self.lm_2d_index = self.lm_2d_index_list[lm_type]
self.landmarks_3d = self.landmarks_3d_list[lm_type]
self.v = verbose
# caffe 模型初始化一下
self.net = caffe.Net(self.caffe_deploy, self.caffe_model, caffe.TEST)
# 图片预处理设置
self.transformer = caffe.io.Transformer({'data': self.net.blobs['data'].data.shape}) # 设定图片的shape格式(1,1,42,42)
self.transformer.set_transpose('data', (2, 0, 1)) # 改变维度的顺序,由原始图片(42,42,1)变为(1,42,42)
self.transformer.set_raw_scale('data', 255) # 缩放到【0,255】之间
#加载均值文件
proto_data = open(self.caffe_mean, "rb").read()
a = caffe.io.caffe_pb2.BlobProto.FromString(proto_data)
m = caffe.io.blobproto_to_array(a)[0]
self.transformer.set_mean('data', m.mean(1).mean(1)) #减去均值,前面训练模型时没有减均值,这儿就不用
self.net.blobs['data'].reshape(1, 1, 42, 42)
caffe.set_mode_cpu()
def class2np(self, landmarks):
coords = []
for i in self.lm_2d_index:
coords += [[landmarks.part(i).x, landmarks.part(i).y]]
return np.array(coords).astype(np.int)
def getLandmark(self, im):
# Detect bounding boxes of faces
if im is not None:
rects = self.bbox_detector(im, 1)
else:
rects = []
# make this an larger array
landmarks_2ds = []
if len(rects) <= 0:
return None, None
for rect in rects:
# Detect landmark of first face
landmarks_2d = self.landmark_predictor(im, rect) # 这里获得特征点的集合,我们需要这个结果来切脸
# Choose specific landmarks corresponding to 3D facial model
## and i decided to move it to another place!! --Tecelecta
landmarks_2ds.append(landmarks_2d)
return landmarks_2ds, rects
def getHeadpose(self, im, landmarks_2d, verbose=False):
h, w, c = im.shape
f = w # column size = x axis length (focal length)
u0, v0 = w / 2, h / 2 # center of image plane
camera_matrix = np.array(
[[f, 0, u0],
[0, f, v0],
[0, 0, 1]], dtype=np.double
)
# Assuming no lens distortion
dist_coeffs = np.zeros((4, 1))
# Find rotation, translation
(success, rotation_vector, translation_vector) = cv2.solvePnP(self.landmarks_3d, landmarks_2d, camera_matrix,
dist_coeffs)
if verbose:
print("Camera Matrix:\n {0}".format(camera_matrix))
print("Distortion Coefficients:\n {0}".format(dist_coeffs))
print("Rotation Vector:\n {0}".format(rotation_vector))
print("Translation Vector:\n {0}".format(translation_vector))
return rotation_vector, translation_vector, camera_matrix, dist_coeffs
# rotation vector to euler angles
def getAngles(self, rvec, tvec):
rmat = cv2.Rodrigues(rvec)[0]
P = np.hstack((rmat, tvec)) # projection matrix [R | t]
degrees = -cv2.decomposeProjectionMatrix(P)[6]
rx, ry, rz = degrees[:, 0]
return [rx, ry, rz]
# return image and angles
def processImage(self, im, draw=True):
faces_dets = dlib.full_object_detections()
prob_list = []
draws = []
all_angles = []
# landmark Detection
im_gray = cv2.cvtColor(im, cv2.COLOR_BGR2GRAY)
landmarks_2ds, bboxs = self.getLandmark(im_gray) # 这里直接使用这个数组
# if no face deteced, return original image
if bboxs is None:
return im, None
for i in range(len(bboxs)):
# Headpose Detection
landmarks_2d = landmarks_2ds[i]
bbox = bboxs[i]
faces_dets.append(landmarks_2d)
landmarks_2d = self.class2np(landmarks_2d)
landmarks_2d = landmarks_2d.astype(np.double)
rvec, tvec, cm, dc = self.getHeadpose(im, landmarks_2d)
angles = self.getAngles(rvec, tvec)
all_angles.append(angles)
if draw:
draws.append(Draw(im, angles, bbox, landmarks_2d, rvec, tvec, cm, dc, b=10.0))
images = dlib.get_face_chips(im, faces_dets, size=320)
# 接入caffe完成分类
for face in images:
net_input = cv2ski(face)
net_input = self.transformer.preprocess("data",net_input)
self.net.blobs['data'].data[...] = net_input
self.net.forward()
prob_list.append(self.net.blobs['prob'].data[0].flatten())
for d in draws:
im = d.drawAll()
return im, bboxs, all_angles, prob_list
def processBatch(self, fileNames, in_dir, out_dir):
if in_dir[-1] != '/': in_dir += '/'
if out_dir[-1] != '/': out_dir += '/'
batch_json = []
for fn in fileNames:
im = cv2.imread(in_dir + fn)
im, bboxes, angles, probs = self.processImage(im)
cv2.imwrite(out_dir + fn, im)
pic_json = []
for i in range(len(bboxes)):
pic_json.append({
"x" : (bboxes[i].left() + bboxes[i].right()) / 2,
"y" : (bboxes[i].top() + bboxes[i].bottom()) / 2,
"rx" : angles[i][0].astype("float"),
"ry" : angles[i][1].astype("float"),
"rz" : angles[i][2].astype("float"),
"angry" : probs[i][0].astype("float"),
"digust" : probs[i][1].astype("float"),
"fear" : probs[i][2].astype("float"),
"happy" : probs[i][3].astype("float"),
"sad" : probs[i][4].astype("float")
})
batch_json.append(pic_json)
return batch_json这个类的实现过程中我们参考了已经有的项目,对它进行了解读和完善,最终得到这个类,其中核心的方法是processImage,它首先完成了人脸的检测,然后使用自己支持的深度学习算法完成了landmark的标定,之后将画出的人脸交给caffe模型完成表情分类
辅助函数定义:
def cv2ski(cv_mat):
'''
将脸从cv2转换成ski的格式
:param cv_mat:
:return:
'''
# rgbgr & normalize
ski_mat = np.zeros((48,48,1), dtype="float32")
cv_mat = cv2.cvtColor(cv_mat, cv2.COLOR_BGR2GRAY, dstCn=1)
cv_mat = cv2.resize(cv_mat, (48, 48), interpolation=cv2.INTER_LINEAR) / 255.
ski_mat = cv_mat[:,:,np.newaxis]
#cv2.imwrite("middle.jpg", cv_mat)
# cv2.imshow("middle", ski_mat)
#cv2.waitKey(0)
return ski_mat.astype("float32")正如注释描述的一样,这个函数完成的是格式转换功能,因为caffe输入需要的格式是skimage.io获得的,而我们整体的处理过程使用opencv完成的,这就要求我们完成格式转换另外,从原图上截下的脸是彩色的,我们还需要完成色域转换
执行文件:
# -- encoding:utf-8 --
#import landmarkPredict as headpose
import socket
import hpd
import json
LOCALHOST = "127.0.0.1"
sock = None
def sockInit(port):
'''
接收文件名,一次一个batch
:param port: 接收使用的port,字符串格式!
:return:
'''
global sock
sock = socket.socket(socket.AF_INET, socket.SOCK_STREAM)
sock.bind((LOCALHOST, port))
sock.listen(1)
return
def recvFileName(conn):
'''
利用已经建立的连接完成一批文件的接收
:param conn:
:return: 一堆文件名
'''
data = conn.recv(4096)
file_name = data.split('\n')
return file_name[:len(file_name) - 1]
def sendJson(conn, jList):
'''
将识别返回的结果发回请求端
:param conn: 之前与请求端建立的连接
:param jList: 返回的一批图片的识别结果
:return: shi
'''
for pic_json in jList:
conn.send(json.dumps(pic_json))
print("---finish sending res of 1 pic---")
print(pic_json)
if __name__ == "__main__":
sockInit(10101)
headpose = hpd.HPD()
while 1:
conn, addr = sock.accept()
print("Accpeting conn from {}".format(addr))
batch_name = recvFileName(conn)
res = headpose.processBatch(batch_name, "/srv/ftp/pic", "/srv/ftp/res")#这里指定正确的路径就可以完成任务
sendJson(conn,res)
依旧是首先定义基本的网络传输函数,接受文件名,并完成从服务端接收所有json对象,并转换成字符串发送的功能
小结
这一部分还会被进一步完善,上面我们提到,dlib的性能存在问题,接下来我们会将darknet接入,着手解决这些问题