资源:
Hybrid-Astar(混合A星算法)路径规划MATLAB代码-电子商务文档类资源-CSDN文库
主要内容:
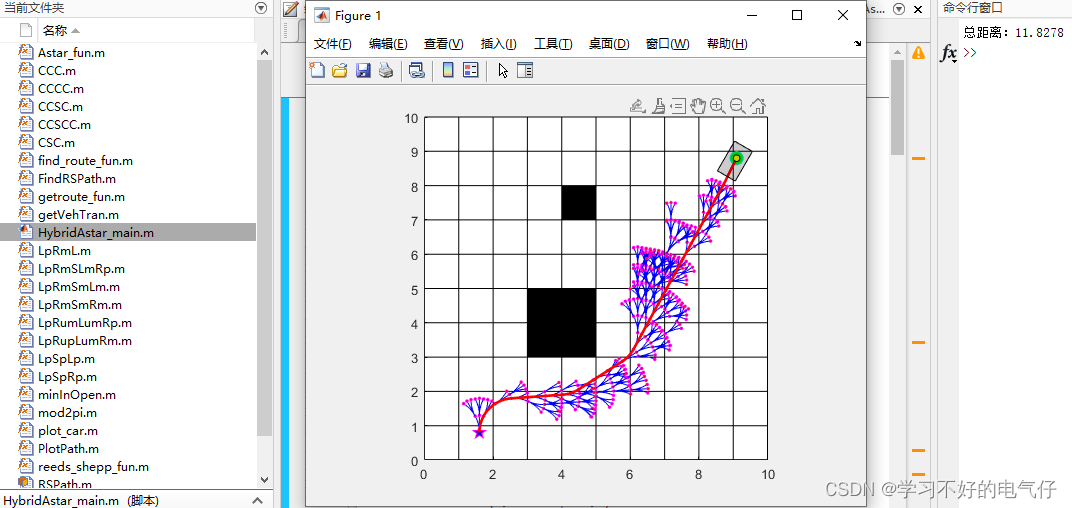
以车辆的运动学模型为节点,以当前点到终点的Astar距离和RS距离两者最大的距离作为H(n)函数的估计代价,使用matlab实现(2016a以上版本) 。
部分代码:
sign(4:5,4:5)=1;%设置障碍
sign(8,5)=1;
startPose = [1.6 0.8 pi/2]; % [meters, meters, radians]
goalPose = [9.1 8.8 pi/3];%终点
min_r=1;%最小转弯半径
safe_dis=0.5;%与障碍物的安全距离
扫描二维码关注公众号,回复:
14683426 查看本文章

step=0.5;%步长
P3=0.01;%角度惩罚系数
ob_coo=[];
figure(1)%画障碍图
hold on
axis equal
for i=1:row
for j=1:col
if sign(i,j)==1
y=[i-1,i-1,i,i];
x=[j-1,j,j,j-1];
h=fill(x,y,'k');
set(h,'facealpha',1)
ob_coo=[ob_coo;[j-0.5,i-0.5]];
end
% %s=(num2str((i-1)*col+j));
% s=(['(',num2str(i),',',num2str(j),')']);
% text(j-0.95,i-0.5,s,'fontsize',8)
end
end
axis([0 col 0 row])%限制图的边界
for i=1:row
plot([0 col],[i i],'k-');
end
for i=1:col
plot([i i],[0 row],'k-');%画网格线
end
路径规划结果: