论文标题:Driving Environment Perception Based on the Fusion of Vehicular Wireless Communications and Automotive Remote Sensors
发表期刊/会议:Sensors 2021
问题:最近关于CAVs的研究大多集中在合作自适应巡航控制、合作交叉口控制和合作感知方面。尽管这些研究提出了很有前景的应用,但没有多少研究研究了在安全应用方面融合车载远程传感器和合作方法的好处。
1 系统概述
为了实现可靠的车辆驾驶环境识别,并提供适当的道路安全应用,提出了基于车载传感器和车辆无线通信的协同感知方法。
协同感知系统
假设每辆车都配备了一个专用短程通信(DSRC)收发器和一个全球导航卫星系统(GNSS)接收器,用于交换车辆状态信息。Ego车辆还配备了车载雷达和摄像头系统,用于遥感周围的目标物体。
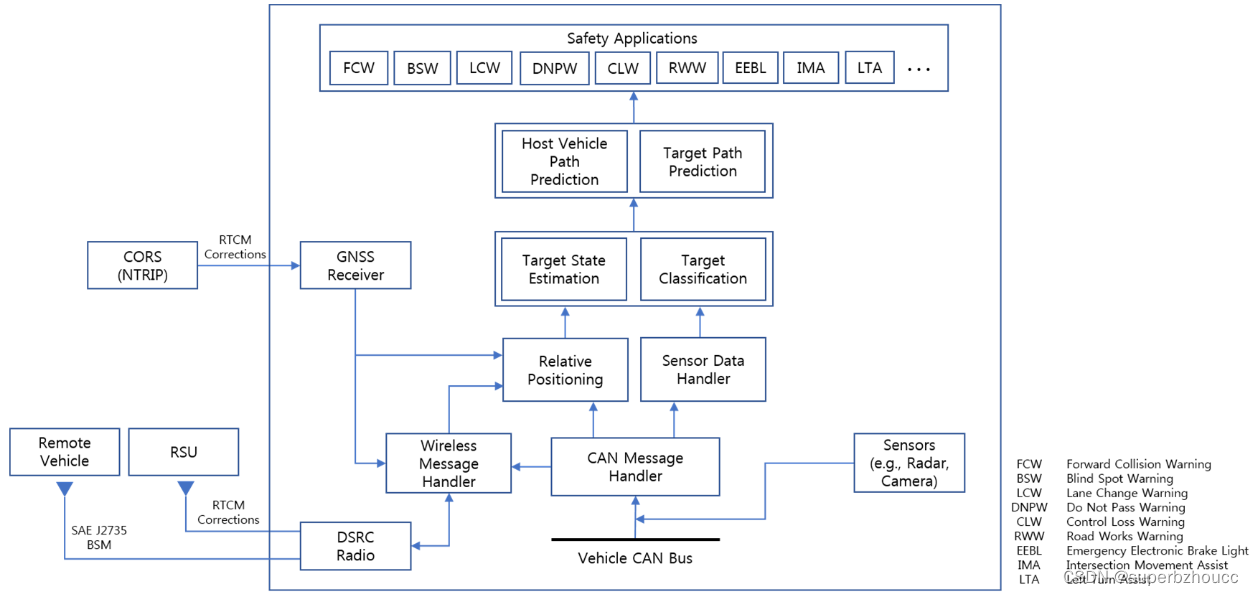
1. 车载传感器(如雷达和摄像头)与其控制器区域网络(CAN)总线相连,通过CAN总线收集车载传感器数据和由车载电子控制单元(ECU)产生的其他数据,表示为CAN Message。
2. 利用车载单元(OBU)通过以太网接口收集接收到的DSRC通信广播的信息(Wireless Message)。 为了提高GNSS的定位精度,采用RTCM校正(包含由海事服务无线电技术委员会(RTCM)特别委员会104定义的GNSS的差分校正):
1)在有互联网连接时,通过互联网协议的RTCM网络传输(NTRIP)获得,
2)对于路边设施单元(RSU),通过SAE J2735定义的DSRC RTCM信息获得。
3. 对于协同相对定位,需要将自车和远程目标的GNSS定位信息(即经纬度)从全局坐标系转换到自车坐标系下。自车的GNSS航向被用于最终rotate远程目标位置,并找到它们在自车坐标系中的相对位置。
4. 结合通过V2X无线通信获得的远程目标的相对位置和其他动态信息 ,以及自车的车载传感器的感知结果,实现更准确可靠的目标状态估计、分类和轨迹预测。进一步提供一些协助安全驾驶应用。
2 V2X通信
车辆状态信息通过DSRC通信交换基本安全信息(BSM)在车辆之间广播和共享。BSM包含从车辆CAN总线和GNSS接收器获得的数据,其中包括安全关键状态信息(如车辆位置、航向、速度和偏航率)。BSM包含两部分数据:
1. 广播BSM时应包括核心数据帧
| 内容 | 描述 |
|---|---|
| 信息计数 | 来自同一发送车辆的相同类型信息的序列号 |
| 临时ID | 对于车载单元(OBU),设备标识符会定期修改。对于路边设备(RSU),这个值可能是固定的。 |
| DSRC秒 | 一分钟内的毫秒,通常代表确定位置的时刻。 |
| 位置 | 纬度、经度和高度。 |
| 定位精度 | 椭圆体的半主轴(长度和方向)和半次轴(长度)代表定位精度。 |
| 传动状态 | 车辆传动状态(即空档、停车、前进和倒车)。 |
| 速度 | 车辆速度。航向 车辆航向。如果发送器停止,可使用过去的值。 |
| 方向盘角度 | 车辆方向盘的角度。 |
| 加速 | 车辆在纵向、横向和垂直轴的加速度。 |
| 偏航率 | 车辆偏航率。 |
| 制动系统状态 | 制动系统和其他控制系统的状态(即牵引力控制、ABS、稳定性控制、制动助力和辅助制动)。 |
| 车辆尺寸 | 车辆宽度和长度 |
2. 可选的附加信息(例如,事件标志、路径历史、路径预测和外部灯光)。
3 状态估计和预测
采用了基于卡尔曼滤波的融合方法对车辆周围的远程目标进行状态估计和轨迹预测。
在每个时间步,将从车载远程传感器以及从远程目标收到的BSM的测量数据收集起来,并用卡尔曼滤波算法进行处理,以减少测量噪声并输出每个轨道的状态和误差协方差。
用来估计远程目标的状态和未来轨迹的信息类型包括:
1)来自V2X通信的位置、速度、航向、偏航率和尺寸信息;
2)来自雷达系统的范围和方位角信息;
3)来自摄像系统的纵向和横向距离信息。
然后,不同轨迹的状态估计被关联并融合在一起,其中每个轨迹的权重是根据误差协方差来确定的。
采用恒定转弯率和速度(CTRV)运动模型来 估计 在感知阶段检测到的远程目标的未来轨迹。
当远程目标的未来轨迹与Ego车辆估计的未来轨迹进行比较,当检测到可能的碰撞时,将产生警告。
3.1 Kalman滤波
卡尔曼滤波根据先验状态和噪声测量值来估计系统的状态以及估计的不确定性。
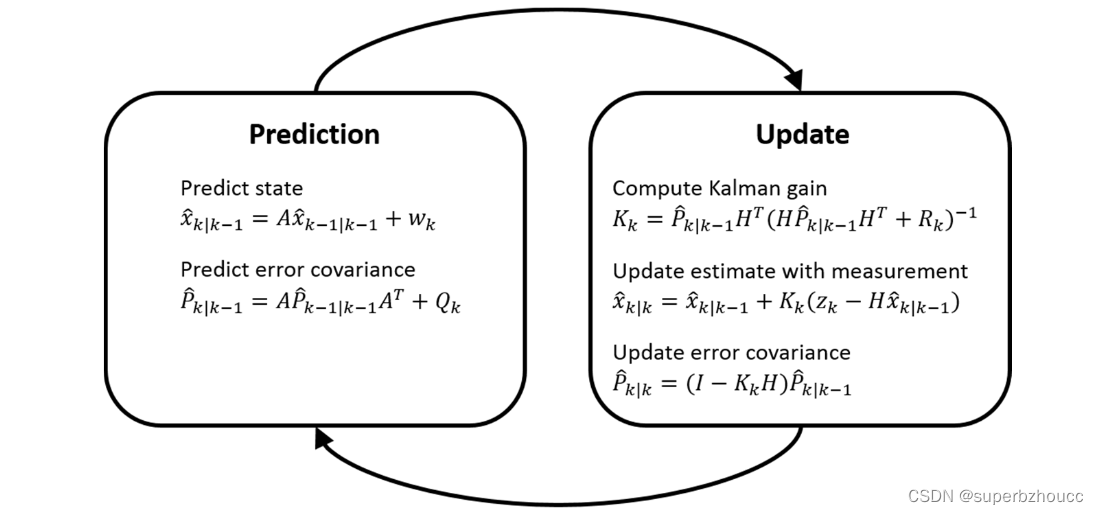
- 在预测步骤中,状态和误差协方差由前一个状态和相应的误差协方差的状态转换矩阵A映射而获得。其中,随机变量wk是过程噪声,假定其为正态分布,过程噪声协方差为Qk,这样wk∼N(0, Qk )。这里假设过程噪声协方差Qk为常数,但在滤波器运行过程中可能会发生变化,以适应不同的动态。
- 在更新步骤中,
1)基于预测阶段获得的误差协方差ˆPk|k-1,measurement矩阵H和measurement误差协方差Rk,计算卡尔曼增益Kk。
2)通过一个线性映射,measurement矩阵H将状态向量xk映射为measurement向量zk:

随机变量vk是measurement噪声,假定其为正态分布,measurement误差协方差为Rk,这样vk∼N(0, Rk )。
3)基于卡尔曼增益、预测阶段获得的状态估计和误差协方差,对measurement向量zk进行更新,得到系统当前的状态估计和误差协方差。
3.2 无偏的转换测量Kalman滤波
由于,车辆周围的远程目标的相对位置和motion通常以笛卡尔坐标给出,而车载传感器(如雷达传感器)得到的测距测量值为极坐标,因此,需要进行极坐标到笛卡尔坐标的转换。本文采用了无偏的转换测量Kalman滤波算法来进行无偏的坐标转换,并获得正确的协方差。
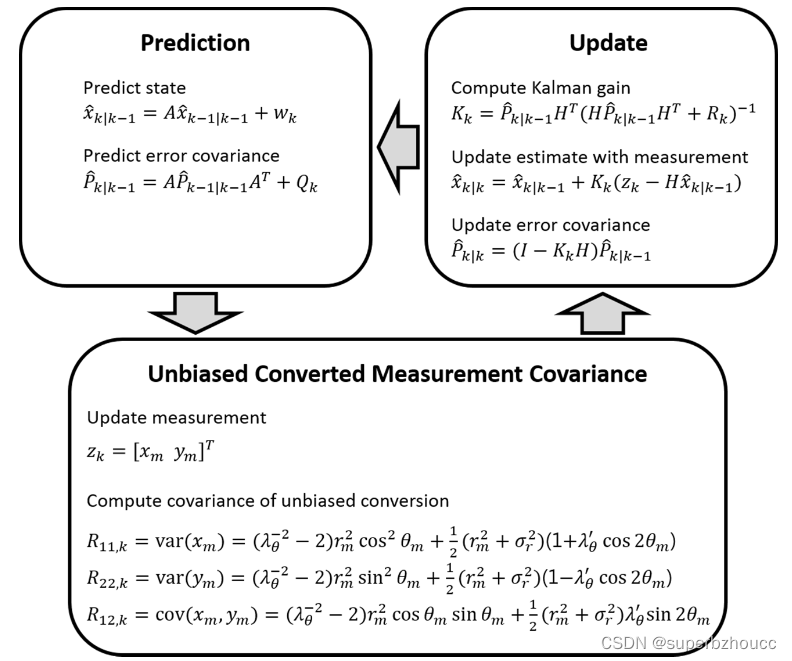
与线性Kalman滤波相比,该滤波过程包括额外的步骤来计算无偏转换的协方差。射程测量值rm和方位角测量值θm定义为

其中r和θ分别是远程目标的真实射程和方位角,vr和vθ是相关的测量噪声,误差标准偏差分别为σr和σθ。
无偏差的转换测量值xm和ym以及相关的协方差需要通过偏差补偿系数λθ和λ′θ来计算:


状态和误差协方差和线性Kalman滤波一样,根据Kalman增益和测量值更新。
3.3 数据融合
高级融合方法(后期融合)的重要优势在于空间和时间上的一致性、具有模块化和通信开销低。采用了一种track-to-track的融合方法来融合来自多个附近车辆/路边设施的高级数据(目标跟踪结果)。
高级融合系统结构:
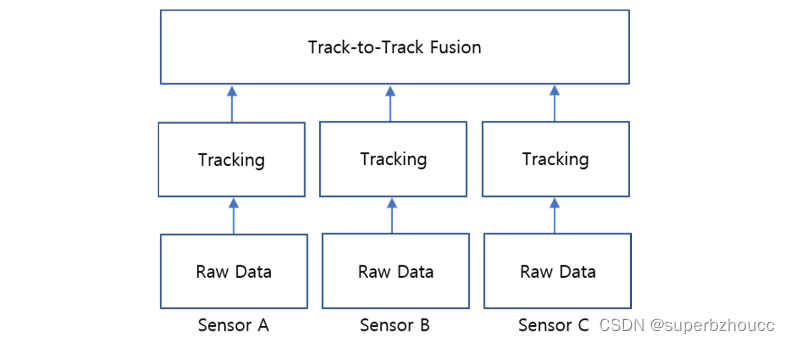
由于凸组合算法实现简单,采用该方法来进行轨迹融合。假设两个状态估计值xi和xj分别具有相应的协方差Pi和Pj,通过以下方式融合以获得状态估计值ˇx:

其中ˇP是与融合后的估计相关的协方差,它由以下公式给出

3.4 轨迹预测和风险评估
采用恒定转弯率和速度(CTRV)运动模型来估计远程目标的未来轨迹。定义第k个时间步的状态向量为

其中,Xk是纵向的相对距离,Yk是横向的相对距离,vk是目标速度,ψk是相对航向,ωk是偏航率。基于前一个time-step目标的状态,预测第k+1个time-step的状态:

为了进行风险评估,采用了圆圈模型,根据远程车辆和Ego车辆的未来轨迹预测可能的碰撞事件:
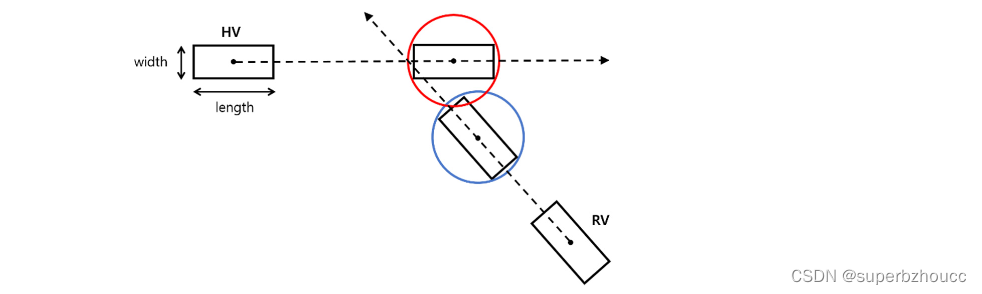
WHV和LHV分别表示Ego车辆的宽度和长度,Ego车辆半径RHV和远程车辆半径RRV由以下公式给出

如果下面的不等式为真(两个车辆中心之间的距离小于等于两半径之和),则确定可能发生碰撞

如果检测到可能的碰撞,就会向Ego车发出碰撞警告。
4 实验
实验是采用两辆测试车进行,每辆车都配备了一个5.9GHz专用短程通信(DSRC)收发器和一个全球导航卫星系统(GNSS)接收器,用于交换车辆状态信息。Ego车辆还配备了车载雷达和摄像头系统,用于遥感周围的物体。
在两辆车之间不同的相对距离下,对所提出的环境感知方法的性能进行评估。
1. 目标位置的定位精度
2. 轨迹预测和风险评估的性能
5 总结
提出了基于车辆无线通信数据与车载传感器数据融合的协同感知方法,其中,采用了基于Kalman滤波的方法来融合车载传感器感知和通过V2X通信接收到的目标轨迹数据,以准确可靠地定位车辆周围的远程目标并预测其未来的轨迹。
局限:
1)所提出的方法应用范围被限制在Ego车辆周围存在单一远程目标的驾驶场景中。
2)轨迹预测是基于基于物理学的运动模型,这种模型可以在短期预测中表现良好,但当预测范围扩大时,其性能就会下降;而且不能预测由变化的道路曲率、交通信号或未来驾驶动作执行所引起的状态变化。
3)没有考虑到,车辆间的交互,车间共享信息的相关性