多传感器融合感知
多传感器融合感知
第1章 如何构建自动驾驶的多传感器系统?


#####################################################
多传感器融合感知
第1章 如何构建自动驾驶的多传感器系统?
Contents
多传感器融合需求概述
多传感器硬件系统的构建
多传感器硬件系统的时序闭环
本章内容
- 多传感器融合需求概述
- 多传感器硬件系统的构建
- 多传感器系统的时序闭环
自动驾驶用来解决出行问题,那出行有哪些问题呢?
环境感知
然而,自动驾驶涉及的传感器…
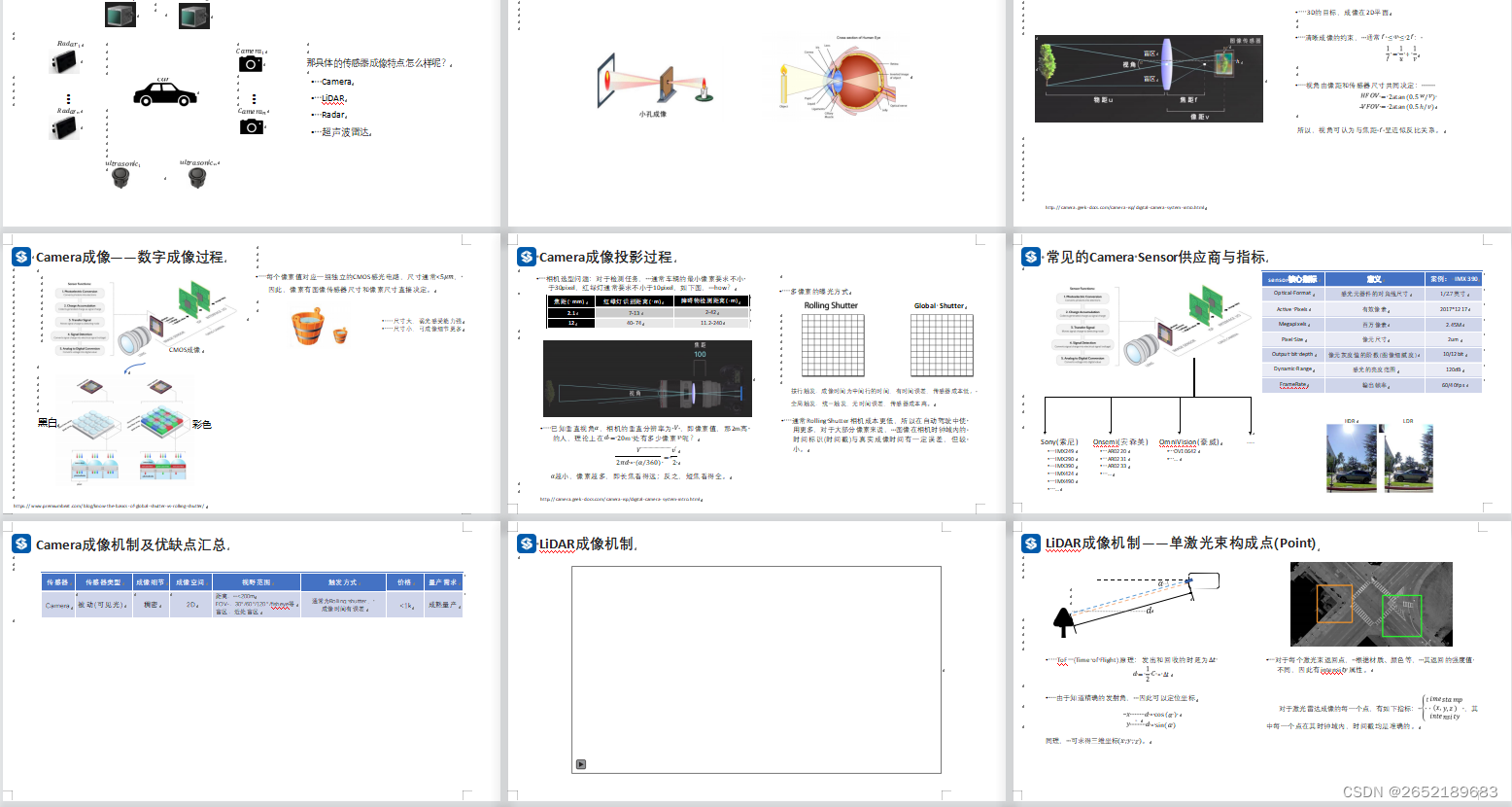
这些传感器( sensors)都是什么呢?
• 激光雷达(LiDAR, Light Detection And Ranging)
• 相机(Camera)
• 毫米波雷达(常称为Radar, Radio Detection And Ranging, 实际是millimeter wave Radar)
• 超声波雷达(ultrasonic Radar)
• 全球卫星定位系统(GNSS, Global Navigation Satellite System)和RTK(Real-Time Kinematic)
• 惯性传感器(IMU, Inertial Measurement Unit)
• 轮速计(Wheel Speedometer)
• …
自动驾驶系统中的这些传感器都是干什么用的?
运动感知类传感器: 协助分析我们在哪,一般用于解决建图定位问题。
• 全球卫星定位系统(GNSS, Global Navigation Satellite System)和RTK(Real -Time Kinematic)
• 惯性传感器(IMU, Inertial Measurement Unit)
• 轮速计(Wheel Speedometer)
• 激光雷达 (LiDAR, Light Detection And Ranging)
• 相机 ( Camera)
环境感知类传感器: 协助分析我们在路上会遇到什么,一般用于解决感知问题。
• 激光雷达(LiDAR, Light Detection And Ranging)
• 相机(Camera)
• 毫米波雷达(常称为Radar,Radio Detection And Ranging,实际是millimeter wave Radar)
• 超声波雷达(ultrasonic Radar)
从传感器的功能角度看 ,建图定位和感知两个方向都需要涉及到多传感器融合问题。
为什么解决一个问题要这么多传感器?
从需求侧分析 , 自动驾驶系统面对要求几近严苛:
一种传感器无法适配所有场景,需要出色的融合技术才能解决。
本章内容
- 多传感器融合需求概述
- 多传感器硬件系统的构建
2.1 感知多传感器分析
2.2 建图定位多传感器简介
2.3 整车传感器系统设计 - 多传感器系统的时序闭环
我们可能知道自动驾驶选择了这些感知传感器
为什么这些传感器可以解决环境感知问题?