论文标题:Car2X-Based Perception in a High-Level Fusion Architecture for Cooperative Perception Systems
发表期刊/会议:2012 Intelligent Vehicles Symposium
问题:早期融合需要很高的数据带宽以传输来自不同传感器的原始数据;由于各传感器的原始数据格式不同,需要对融合模块进行重大改变,因此早期融合方式不具有模块化。而对于后期融合,每个传感器都对其原始数据进行预处理,然后向中央融合单元传输tracks list(track的状态和协方差),可减少通信带宽;另外,传感器和中央融合模块之间的接口是标准化的,因此后期融合架构是高模块化的。但是,各个传感器分享数据的空间和时间对齐是协同感知系统的一个主要挑战。
1 基于Car2X的协同感知系统
在一个后期融合架构中提出一种虚拟传感器方法,对来自车辆或路边设施的目标跟踪结果进行处理,使它们在时间和空间上与ego车辆基于自身感知信息获得的预测结果对齐,以进行更好的融合。
Ego车辆内的协同感知系统的融合架构:
1. 通信范围内的所有车辆和路边设施利用其自身的Local Perception模块对局部传感器感知信息进行融合,生成一个object列表(object的状态估计和协方差、分类结果、车辆检测到的object存在的概率),作为协同感知信息(CPM),同时每辆车还利用Ego Data模块提供车辆的位置和状态的信息(cooperative awareness 信息(CAM))。
2. 车辆之间通过无线通信互相分享CPM和CAM,同时路边设施也向所有车辆发送其CPM。
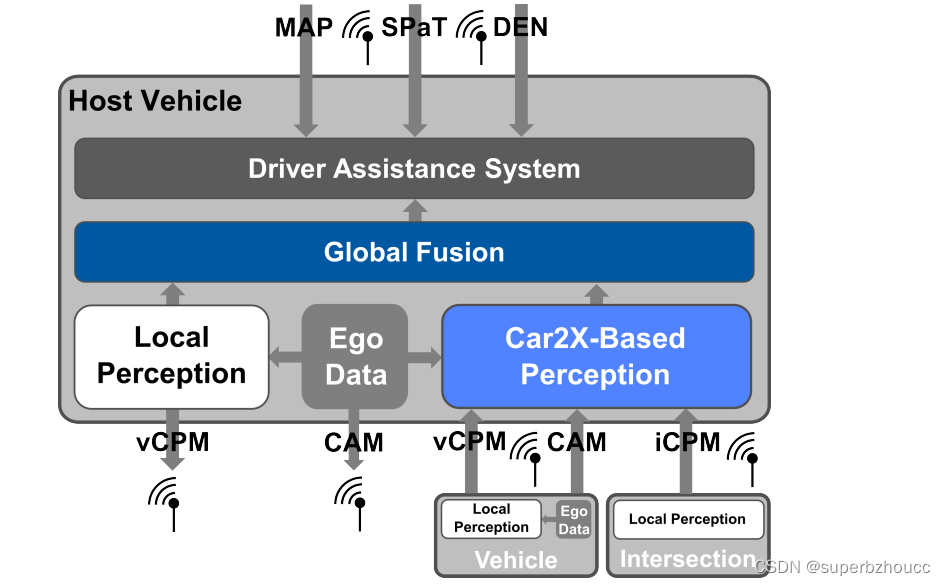
3. 假设其中有一辆车为ego车辆,ego车辆的Car2X-Based Perception模块一旦接收到来自附近车辆的CAM/CPM和路边设施的CPM,就会对这些信息进行时间和空间上的对齐处理,最终输出一个object列表。
4. Global Fusion模块将自车的预测结果(Local Perception模块的输出)和经过时间和空间对齐后的附近车辆或路边设施分享的预测结果(Car2X-Based Perception模块的输出)融合为一个全局object列表。
5. 融合后的全局object列表 和 其他的信息 {MAP(交叉口几何和拓扑结构)、SPaT(信号相位和时间)或DEN(分散的环境通知)信息} 一起协助驾驶辅助系统做出适当的决策。
1.1 Car2X-Based Perception模块
为使后期融合架构高度模块化,提出了一个Car2X-Based Perception模块对接收到的CPM进行预处理。
1.1.1 时间对齐
由于恒定转率和加速度(CTRA)运动模型包含了车辆的纵向加速度和偏航率,可以用于车辆运动预测。采用CTRA车辆运动模型结合无迹卡尔曼滤波器(UKF)来预测接收到的CPM中的object在当前时刻的状态,使其与自车Local Perception模块的状态估计时间对齐。
UKF的核心思想是:采用UT变换(unscented transformation),根据一定的采样策略,获得一组Sigma采样点来描述随机变量的高斯分布,然后通过非线性函数的传递,再利用加权统计线性回归来近似非线性函数的后验均值和方差。
通过在发送车辆坐标系下的X-Y平面内进行预测,将CTRA平面运动模型应用于车辆的3D预测中: 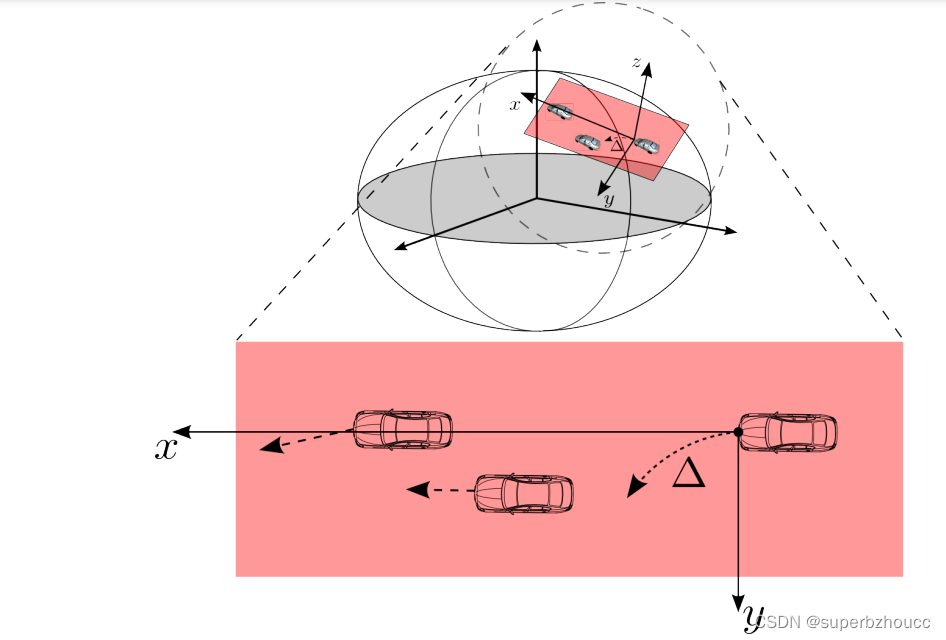 这样的方式考虑到了车辆的空间方向,使得在倾斜道路或下坡路段的预测比基于简单的平面模型更准确。另外,由发送车辆的Local Perception模块检测到的object在这个平面上被表示为额外的车辆,这些车辆当前时刻的状态也将被预测,使其时间对齐以便进行融合。
这样的方式考虑到了车辆的空间方向,使得在倾斜道路或下坡路段的预测比基于简单的平面模型更准确。另外,由发送车辆的Local Perception模块检测到的object在这个平面上被表示为额外的车辆,这些车辆当前时刻的状态也将被预测,使其时间对齐以便进行融合。
考虑到外界不确定性,通过过程噪声变量对状态的增广,有助于有效地将过程噪声的影响纳入其他状态变量。因此,为了处理预测过程噪声影响,本文采用了增广无迹卡尔曼滤波器(aUKF)来预测接收到的CPM中的object当前的状态。
1. 无迹卡尔曼滤波器(aUKF)滤波的初始状态估计表示为:

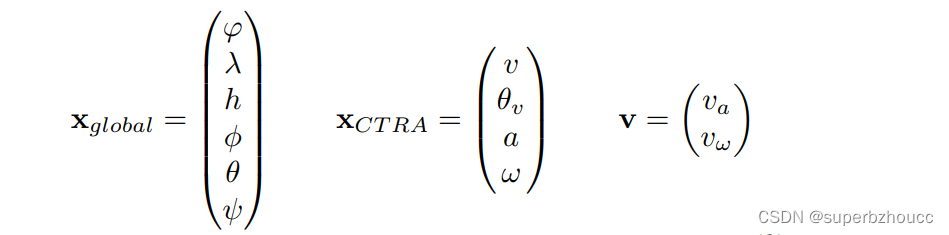
X g l o b a l X_{global} Xglobal:全局坐标系下的全局坐标位置信息(纬度 φ \varphi φ,经度λ,高度h)和车辆自身坐标系下的orientation信息(滚动角 ϕ \phi ϕ,俯仰角θ,偏航角ψ);
CTRA运动模型使用的运动变量 X C T R A X_{CTRA} XCTRA:纵向速度 v v v、速度矢量在车辆坐标系下的方向 θ v θ_v θv(滑移角)、纵向加速度 a a a 和偏航率 ω ω ω。
过程噪声 V V V:预测时间内加速度的过程噪声 v a v_a va 和偏航率的过程噪声 v ω v_ω vω。
2. 选择sigma-point:根据初始状态估计 X a X_a Xa和估计协方差矩阵,利用比例修正对称采样法,可得到 2 N x + 1 2N_x+1 2Nx+1个Sigma采样点 x ( i ) x^{(i)} x(i)和相应的权值(选择sigma-point的个数取决于状态向量的维度)。
3. 时间更新:将选择的sigma-采样点通过非线性映射函数 f p r e d {f}_{pred} fpred 来计算得到每个sigma-point的预测状态 z ( i ) z^{(i)} z(i):
这一过程就是预测当前时刻车辆在其坐标系x-y平面内的状态(位置和motion),并将由此产生的位置和orientation的偏移量∆加到其原始的全局状态 X g l o b a l X_global Xglobal上,实现时间对齐。
1.1.2 空间对齐
- 将接收到的CMP中的object的全局状态 X g l o b a l X_global Xglobal 和ego(host)车辆的全局状态进行拼接(这两个状态都已经时间对齐),得到最终的全局状态 X g l o b a l X_{global} Xglobal:

- 采用unscented transformation (UT)变换计算属于该相对状态的协方差:
1) 基于全局状态 X g l o b a l X_{global} Xglobal和协方差 P g l o b a l P_{global} Pglobal,采用比例修正对称采样策略,获得 2 N x + 1 2N_x+1 2Nx+1个sigma采样点和相应的权值(sigma采样点的个数取决于全局状态向量 X g l o b a l X_{global} Xglobal的维度 N x N_x Nx):
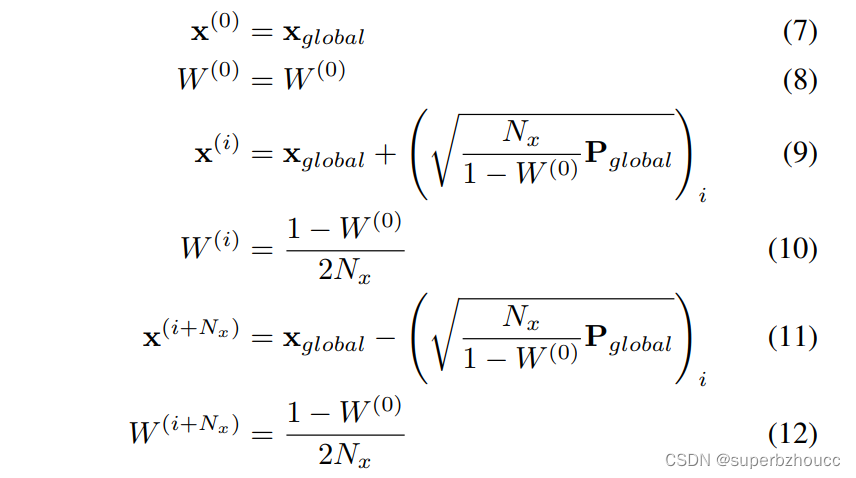
其中, W ( 0 ) W^{(0)} W(0)是一个可通过训练获得的权重参数,索引 i i i 表示这些方程中所得矩阵的第 i i i 列。
2) 选取的sigma点通过非线性坐标转换,计算得到CMP中的object在ego车辆坐标系下的相对状态:

3) 基于转换后的sigma点和相应的权值,计算出相对状态预测的均值和协方差:
2 实验
为了证明Car2X-Based Perception模块的准确性和一致性,两辆配备了基于GPS的位置过滤器和通信单元的宝马5系作为测试车辆。这两辆车都配备了高精度GNSS/INS组合定位及测姿技术,可生成车辆状态(位置:纬度,经度,高度;orientation:滚动角,俯仰角,偏航角)的真实值用于训练。
3 总结
所提出的Car2X-Based Perception模块作为一个虚拟传感器被整合到后期融合架构中,主要用于将发送车辆/路边设施的Local Perception模块的输出进行时间和空间上的对齐:
1)对于时间对齐,通过采用CTRA车辆运动模型结合UKF来预测协作车辆和接收到的物体的3D位置和 motion。其中,UKF的状态被一个过程噪声向量所增广,以这样简单的方式包含了运动模型的不准确性;
2)对于空间对齐,UT变换计算相对状态。
局限:
1)实验验证时并不涉及协同感知,没有实现融合模块,也没有针对车辆非平面运动,无法验证Car2X-Based Perception模块的有效性。需对融合算法在协同感知系统中的适用性进行评估。
2)采用的UKF方法假设了车辆的运动符合高斯分布,这有可能与实际不符。