1、什么是IK?
在骨骼动画中,构建骨骼的方法被称为正向动力学,它的表现形式是,子骨骼(关节)的位置根据父骨骼(关节)的旋转而改变,用我们人体举例子:当我们抬起手臂时,是肩部关节带动的整个手臂的运动,用父子骨骼理解的话就是父带动了子。
IK全称是Inverse Kinematics,翻译过来的意思就是反向动力学的意思,它和正向动力学恰恰相反
它的表现形式是,子骨骼(关节)末端的位置改变会带动自己以及自己的父骨骼(关节)旋转
用我们人体举例子:当我们拿起一个杯子的时候是用手掌去拿,以杯子为参照物,我们移动杯子的位置,手臂会随着杯子一起移动,用父子骨骼理解的话就是子带动了父
2、2D IK包引入
在Package Manager窗口中引入2D IK工具包,需要在Advanced高级选项中选中Show preview packages(显示预览包),这样才能看到2D IK相关内容
注意:如果在引入包时报错,需要在Windows防火墙中添加入站规则
3、2D IK的使用
- 新建一个空物体作为根节点,作为已建立骨骼的2D物体的父节点;
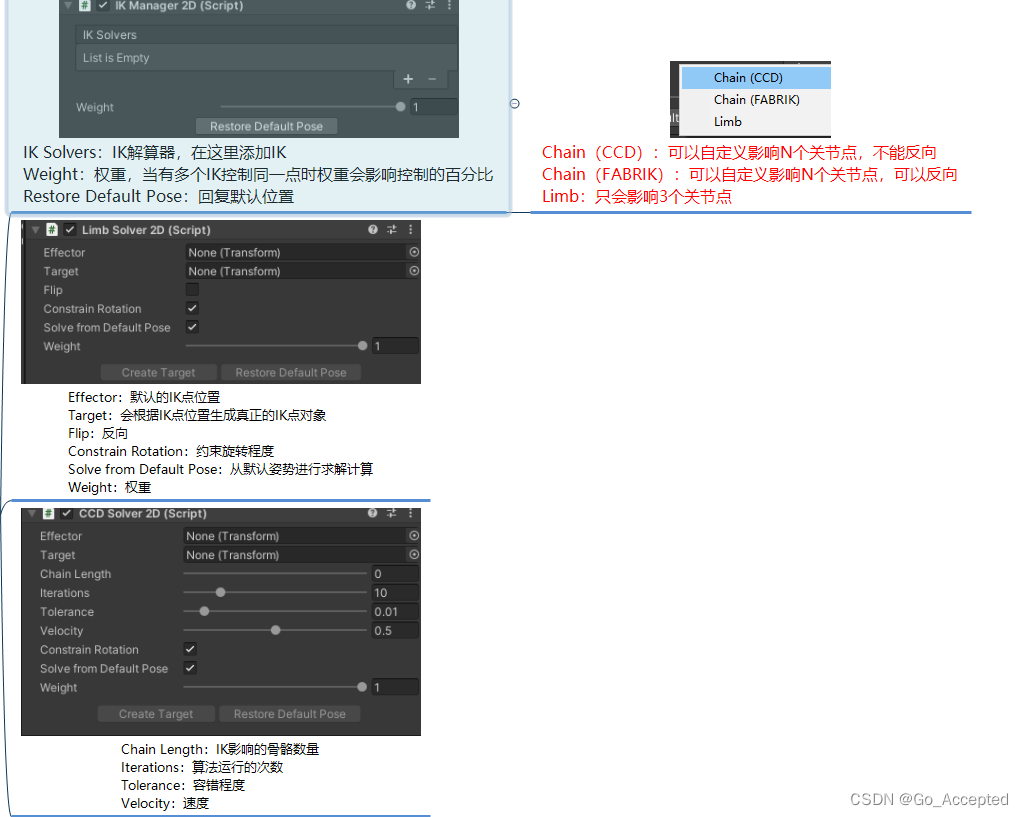
- 在根节点加载 IK Manager 2D 脚本;
- 在要控制的骨骼末端创建一个空物体;
- 在IK Manager 2D 脚本添加IK 控制节点。添加之后会在 HIerarchy 中新建一个根节点的子对象(假设为A),并有对应的 Solver 脚本。将上一步中建立的骨骼末端的空物体作为 IK 节点的默认位置(拖拽到 Solver 脚本中的 Effector),并设置好相关参数之后,点击 Create Target, 会在 A 下新建一个物体,即 IK 节点,通过控制 IK 节点,并已经将其加载到了 Solver 脚本中的 Target 变量,即可反向控制父节点的移动。
如果将 IK 节点作为某个骨骼的子对象,那么 IK 节点会随着该骨骼一起移动,否则可能出现的情况就是:对手脚建立的 IK 节点,当身体移动的时候,手脚会被锁定,无法跟着身体移动,这个时候将手脚的 IK 节点作为身体骨骼的子对象即可。
4、IK的意义
- 瞄准功能
- 头部朝向功能
- 拾取物品功能
等等有指向性的功能时 我们都可以通过IK来达到目的,最大的作用,可以方便我们进行动画制作
5、练习
假设手臂已经建立了骨骼,通过点击鼠标移动手臂。主要思路就是通过改变 IK 节点的位置
public class MpveArm: MonoBehaviour
{
public Transform ikPoint; // 通过 Create Target 建立的节点
private float z;
private Vector3 mousePos;
// Start is called before the first frame update
void Start()
{
//这里是为了得到当前2D游戏所在平面的 横截面z轴坐标 用于之后的 屏幕坐标转世界坐标
z = Camera.main.WorldToScreenPoint(ikPoint.position).z;
}
// Update is called once per frame
void Update()
{
if ( Input.GetMouseButton(0) )
{
//得到当前鼠标所在位置
mousePos = Input.mousePosition;
//改变z轴 为了之后转换世界坐标后 横截面位置的正确
mousePos.z = z;
ikPoint.position = Camera.main.ScreenToWorldPoint(mousePos);
}
}
}