1、内容简介
选择一款平衡车(如:小米九号平衡车等),并估计平衡车的关键参数。完成以下工作:
1. 建立平衡车模型;
2. 设计反馈控制器,实现平衡车静止状态下的平衡控制;
3. 讨论以上设计反馈控制器的性能。
344-可以交流、咨询、答疑
2、内容说明
- 一种典型的平衡车动态平衡原理图
两轮自平衡车控制系统具有明显欠驱动的特点,平衡车的直接动力来源就是左右两个电机,假设以左右电机转矩为系统输入量,整个控制系统就是通过调整左右电机转矩达到稳定平衡状态,而系统的输出变量明显较多,如车身倾斜角度、倾斜角速度、车轮转角、车轮转角速度等,对于这种本身高度不稳定的系统,合适的控制算法是必须的。

- 一种典型的平衡车系统构成
参照国内外两轮自平衡车研究,可得到两轮自平衡车系统整体结构如图所示,此系统框图从左至右体现出了两轮自平衡车的主要功能模块以及整个控制流程,传感器信号采集模块、中央处理器模块、电机驱动模块完成各自任务以至于最终维持车体动态平衡。
3、仿真假设:
1).倒立摆只在二位平面内做水平直线移动,忽略路面的输入干扰视为水平。
原因:模型使用条件缩小,模型建立难度降低。
2).假设倒立摆平衡杆θ值在0附近。
原因:符合控制目标,由于模型为非线性的,此步骤是把模型线性化处理的重要假设。
3)忽略路面摩擦力,和空气阻力。
原因:非线性方程的线性化、倒立摆移动速度小,移动距离短。
4)倒立摆平衡杆部分按照直接质心位置在顶端计算。
原因:可省略转动惯量的计算,降低模型复杂度,简化控制模型。
5) 倒立摆plant输入为单输入,为加速度
原因:输入可以是加速度、力或者速度,如果使用速度值需要根据速度推到力矩值,模型太过复杂。
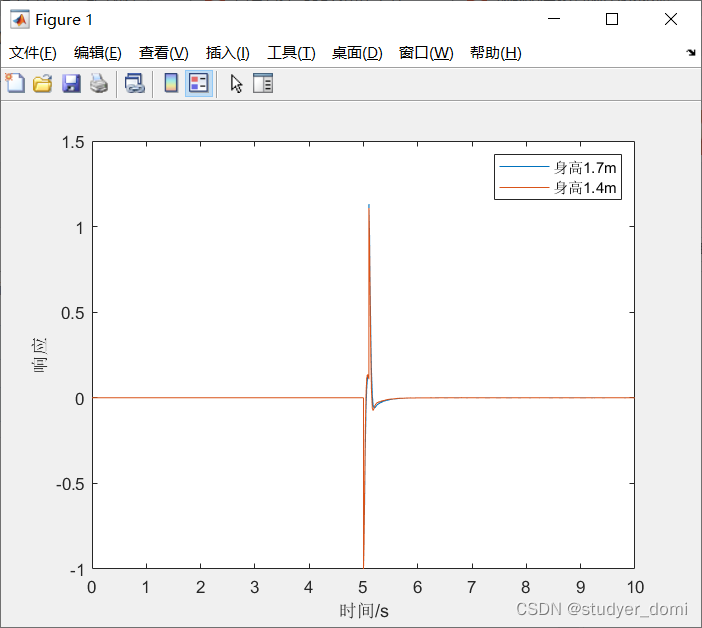
3、仿真分析

4、参考论文
略