stm32+HAL库制作蓝牙平衡车
前言
有很多单片机初学者都会选择把平衡小车作为第一件作品,但是制作过程中会碰到许多疑问,笔者也在学习过程中完成了一台摇摇晃晃的平衡小车,希望以自己的方式,向读者展示一台平衡小车诞生的全流程。
下载工程
关注公众号小电动车,回复"平衡车"获取工程文件及其他资料,建议结合工程阅读本文。

效果


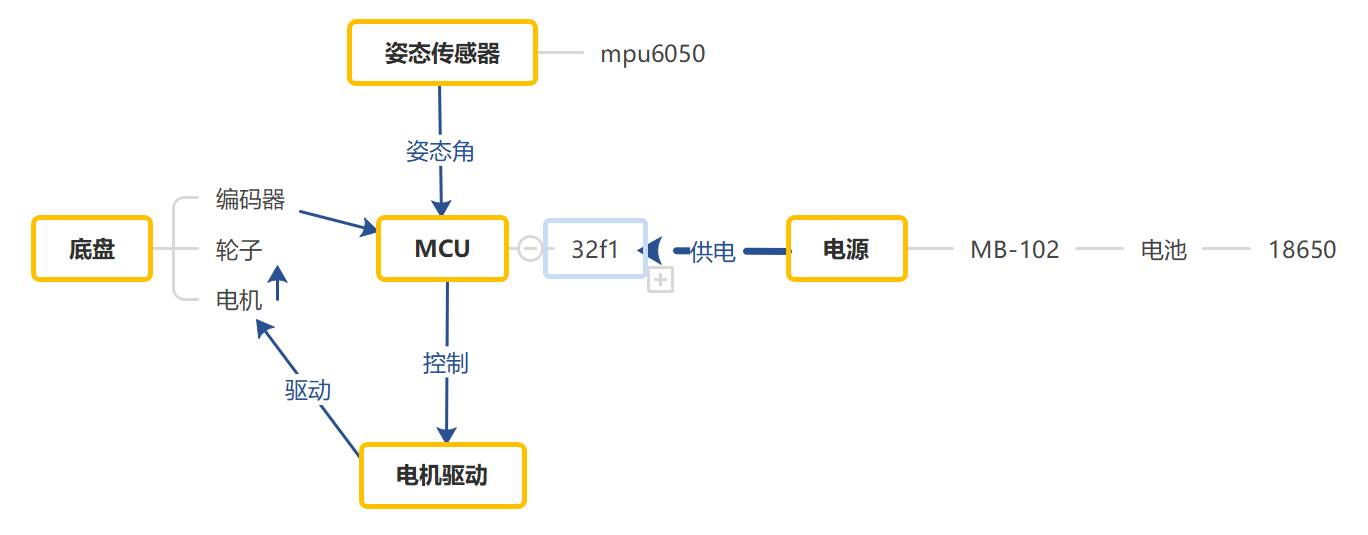
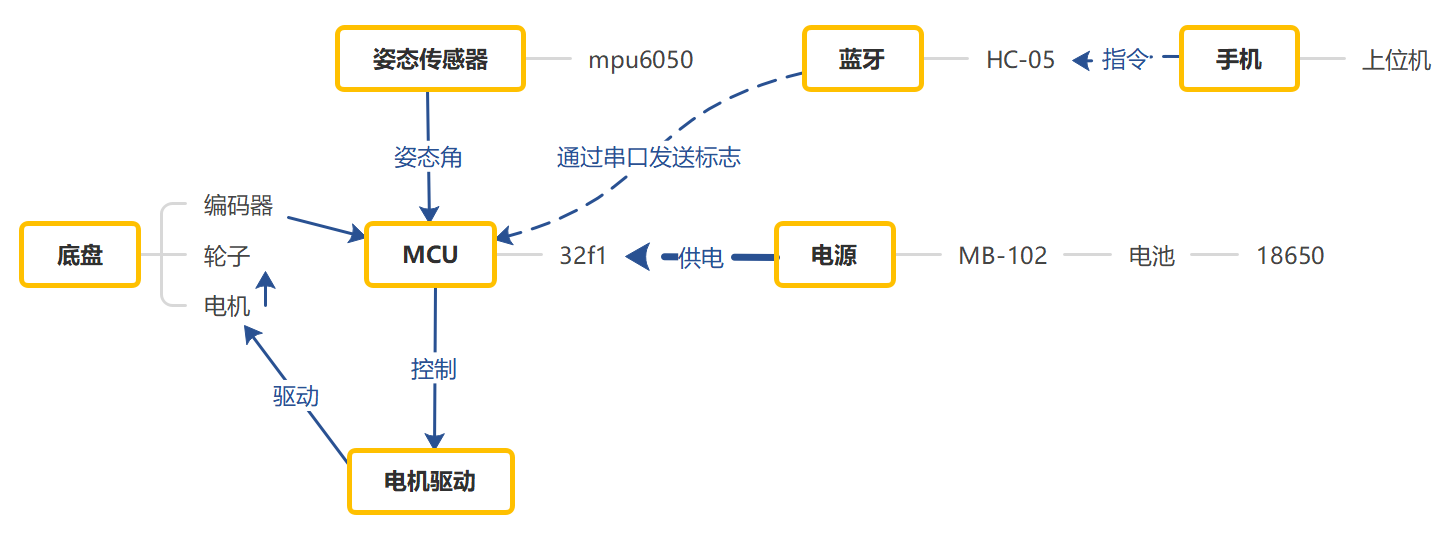
组成
 {#fig:组成框图}
{#fig:组成框图}
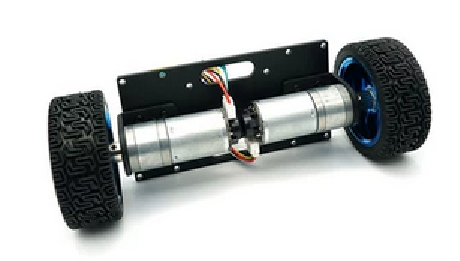
底盘
 {#fig:小车底盘}
{#fig:小车底盘}
如图,有两个带编码器的电机,轮子和支架。
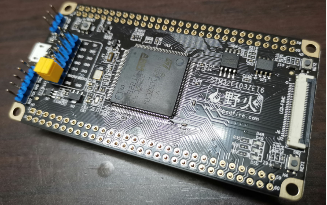
主控
 {#fig:stm32f103ZET6}
{#fig:stm32f103ZET6}
附件提供的程序对应的是stm32f103ZET6,在野火买的核心板,这里有些大材小用,其实stm32c8t6最小系统板是完全足够的。\
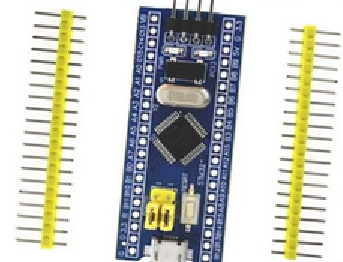 {#fig:stm32f103C8T6}
{#fig:stm32f103C8T6}
电机驱动
 {#fig:TB6612FNG}
{#fig:TB6612FNG}
电机模块用的是TB6612FNG。\

姿态传感器
 {#fig:MPU6050}
{#fig:MPU6050}
电源

一个电池盒,装上两节18650电池可以输出7.4V的电压,接上电源模块MB-102,可以得到5V和3.3V,为整个系统供电。
结构等等
M3螺丝螺母铜柱、杜邦线若干。

直立
首先把车扶稳,开电源,mpu6050初始化并确定平衡位置,车往哪边倒,mpu6050就给芯片发对应数据,芯片控制电机就往哪边追,这就颤颤巍巍地立起来了。
通过mpu6050,可以获取小车当前的姿态角,通过iic来读取模块内寄存器的数据,可以测到三轴加速度和三周角速度,我们需要的是Pitch角或Roll角(由mpu摆放位置决定),直接读取出来的是六个数据,还需要复杂的数学计算才能得到三个角度,一种便捷的方法是移植官方的DMP库,让mpu自己处理成角度让我们读取。具体怎样移植,在这个教程里有详细介绍。

那获取到了角度,就需要PID算法,平衡小车的PID分成三部,直立PD环、速度PI环、转向PD环。
直立环
要立5秒,需要第一个环,直立环需要mpu的角度数据,需要一个脚接收中断、两个脚iic通信、还要开两个定时器输出PWM控制电机(电机的逻辑控制还需要四个脚,还要电机驱动的总开关STBY)。
stm32的高级定时器有PWM输出模式,我们在cubeMX里打开这个功能。
 {#fig:配置定时器PWM模式}
{#fig:配置定时器PWM模式}
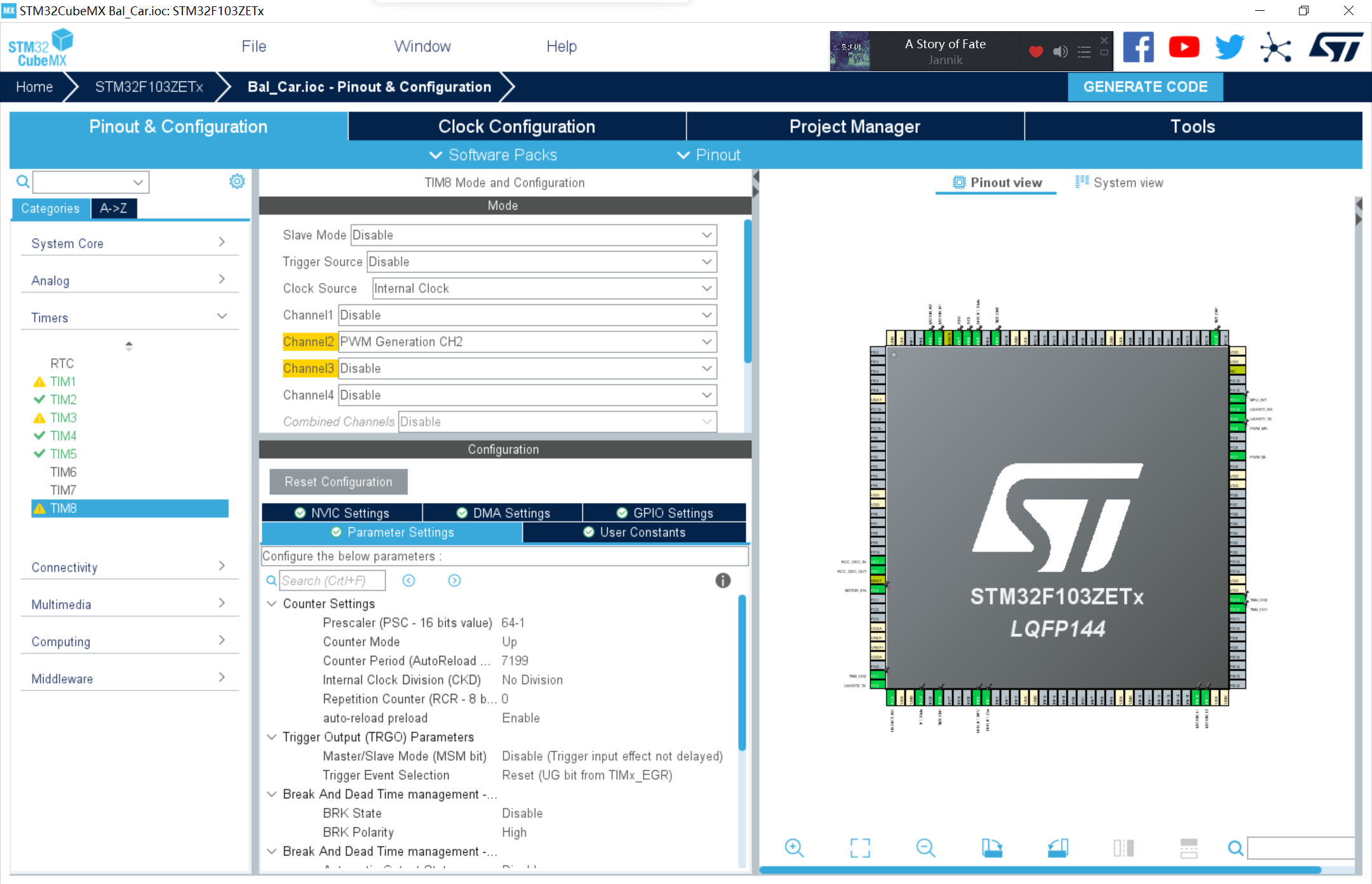 {#fig:配置定时器PWM模式}
{#fig:配置定时器PWM模式}
//直立环
int balance_UP(float Angle,float Mechanical_balance,float Gyro)
{
float Bias;
int balance;
Bias = Angle-Mechanical_balance;
balance = balance_UP_KP*Bias+balance_UP_KD*Gyro;
return balance;
}
速度环
要立得稳怎么推都不倒,就需要前两个环,而速度环还需要电机的速度数据,那就需要用32两个定时器进行解码。
这里再启用两个定时器的解码模式。
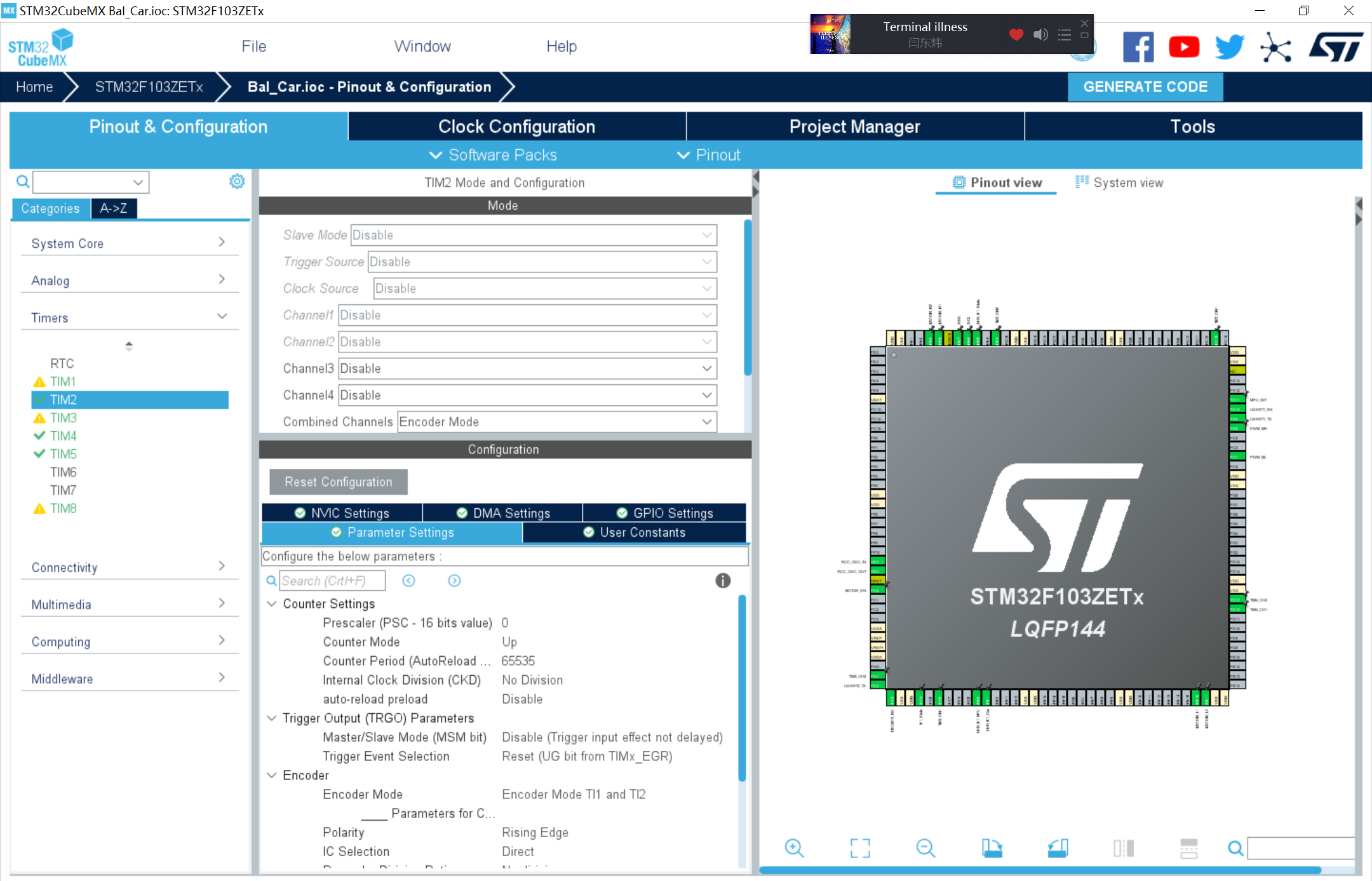 {#fig:配置定时器解码器模式}
{#fig:配置定时器解码器模式}
 {#fig:配置定时器解码器模式}
{#fig:配置定时器解码器模式}
//速度环
int velocity(int encoder_left,int encoder_right)
{ //定义一些变量
static float Velocity,Encoder_Least,Encoder,Movement = 0;
static float Encoder_Integral;
//然后就是PID的一些操作
Encoder_Least =(Encoder_Left+Encoder_Right)-0;
Encoder *= 0.8;
Encoder += Encoder_Least*0.2;
Encoder_Integral +=Encoder;
Encoder_Integral = Encoder_Integral;
//接下来限制一下速度,这里是因为我的车用了很多螺丝、
//长尾夹之类的比较重,冲太快容易倒,限到7000几乎就不会倒了
if(Encoder_Integral>7000)
Encoder_Integral=7000; //积分限幅
if(Encoder_Integral<-7000)
Encoder_Integral=-7000; //积分限幅
//得到速度环的值
Velocity=Encoder*velocity_KP+Encoder_Integral*velocity_KI;
//为了安全,万一车倒了车轮就不要再转了,
//所以要清空积分,配合下面检测有没有倒的函数
if(roll<-45 || roll>45)
Encoder_Integral=0; //清空积分
return Velocity;
}
这样,在前面HAL、Tim、GPIO、IIC、MPU各种初始化后,mpu开始工作,100Hz的频率采集一次角度(这里采集的是Roll角),并发出中断,stm32就进入了中断回调函数。
//中断回调函数
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
{ //获取成功的信号,然后获取Roll角度,和一个角速度
//(这里全拿了,显然代码不是自己写的。。)
gyro_data_ready_cb();
dmp_getdata();
MPU_Get_Gyroscope(&gyrox, &gyroy, &gyroz);
//接着Encoder读取了两个计时器的计数值,原本是累加值,
//但是每读取一次就归零变成求了一次导,这得到的就是跟速度线性相关的值了
Encoder_Left = (short)TIM2 -> CNT;TIM2 -> CNT = 0;
Encoder_Right = -((short)TIM4 -> CNT);TIM4 -> CNT = 0;
//再把获取的速度放进直立环和速度环函数
Balance_Pwm = balance_UP(roll, Mechanical_angle, gyrox);
Velocity_Pwm = velocity(Encoder_Left,Encoder_Right);
//再再运算得出两个电机的PWM占空比
moto1 = Balance_Pwm - Velocity_Pwm;
moto2 = Balance_Pwm - Velocity_Pwm;
//然后限幅、检测车有没有倒,就可以更新PWM值了
Xianfu_Pwm();
Turn_Off(roll);
Set_Pwm(moto1, moto2);
}
//限幅
void Xianfu_Pwm(void)
{
if(moto1<-7000 ) moto1=-7000 ;
if(moto1>7000 ) moto1=7000 ;
if(moto2<-7000 ) moto2=-7000 ;
if(moto2>7000 ) moto2=7000 ;
}
//摔倒保护
void Turn_Off(float angle)
{
if(angle<-45||angle>45){
moto1=0;
moto2=0;
}
}
到此,小车就可以自己站起来啦
蓝牙
既然能自己站,下一步就要跑一跑了,需要加一个蓝牙模块,这里用了HC-05。
 {#fig:整体框图}
{#fig:整体框图}
蓝牙控制逻辑
这里启用了串口2+中断,这样,手机这边按下方向键发送一个记号1234,单片机接收到进入串口中断,判断前后左右走,手机这边松开键,就发一个0,单片机接收到再进入串口中断,恢复到直立状态。
//串口中断回调函数
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
switch(usart2_Re)
{
case 0:
Flag_forward = 0, Flag_retreat = 0, Flag_left = 0, Flag_right = 0;
HAL_GPIO_WritePin(LED_BT_Car_GPIO_Port, LED_BT_Car_Pin, 1);
break;
case 1:
Flag_forward = 1, Flag_retreat = 0, Flag_left = 0, Flag_right = 0;
HAL_GPIO_WritePin(LED_BT_Car_GPIO_Port, LED_BT_Car_Pin, 0);
break;
case 2:
Flag_forward = 0, Flag_retreat = 1, Flag_left = 0, Flag_right = 0;
HAL_GPIO_WritePin(LED_BT_Car_GPIO_Port, LED_BT_Car_Pin, 0);
break;
case 3:
Flag_forward = 0, Flag_retreat = 0, Flag_left = 1, Flag_right = 0;
HAL_GPIO_WritePin(LED_BT_Car_GPIO_Port, LED_BT_Car_Pin, 0);
break;
case 4:
Flag_forward = 0, Flag_retreat = 0, Flag_left = 0, Flag_right = 1;
HAL_GPIO_WritePin(LED_BT_Car_GPIO_Port, LED_BT_Car_Pin, 0);
break;
default:
Flag_forward = 0, Flag_retreat = 0, Flag_left = 0, Flag_right = 0;
Yaw_FPV_L = 0, Yaw_FPV_R = 0, Pitch_FPV_U = 0, Pitch_FPV_D = 0;
break;
}
HAL_UART_Receive_IT(&huart2, &usart2_Re, 1);
}
制作蓝牙app
至于手机的上位机软件,用appinventor可以快速制作,参见教程 app
inventor教程\
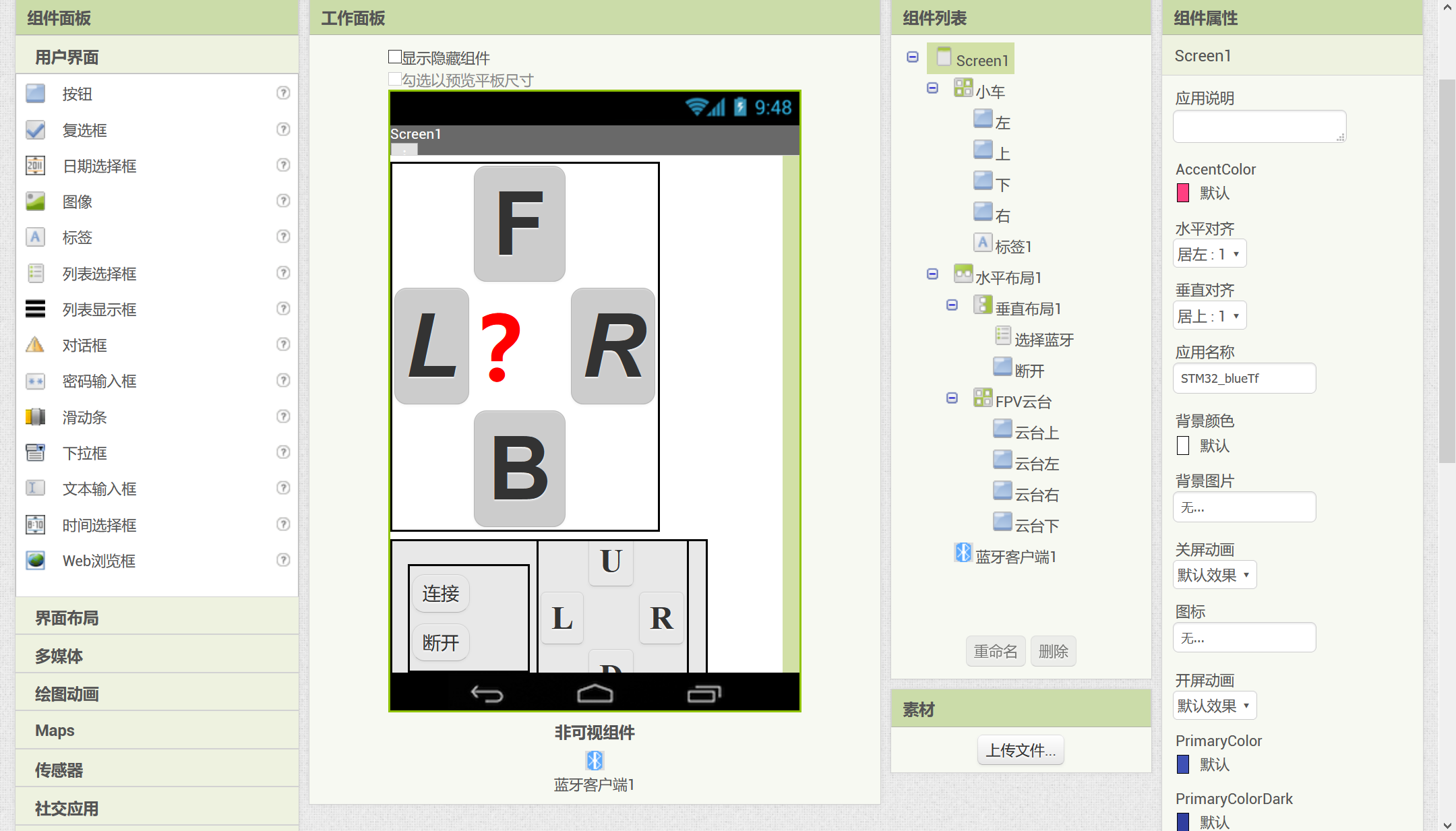 {#fig:app布局}
{#fig:app布局}
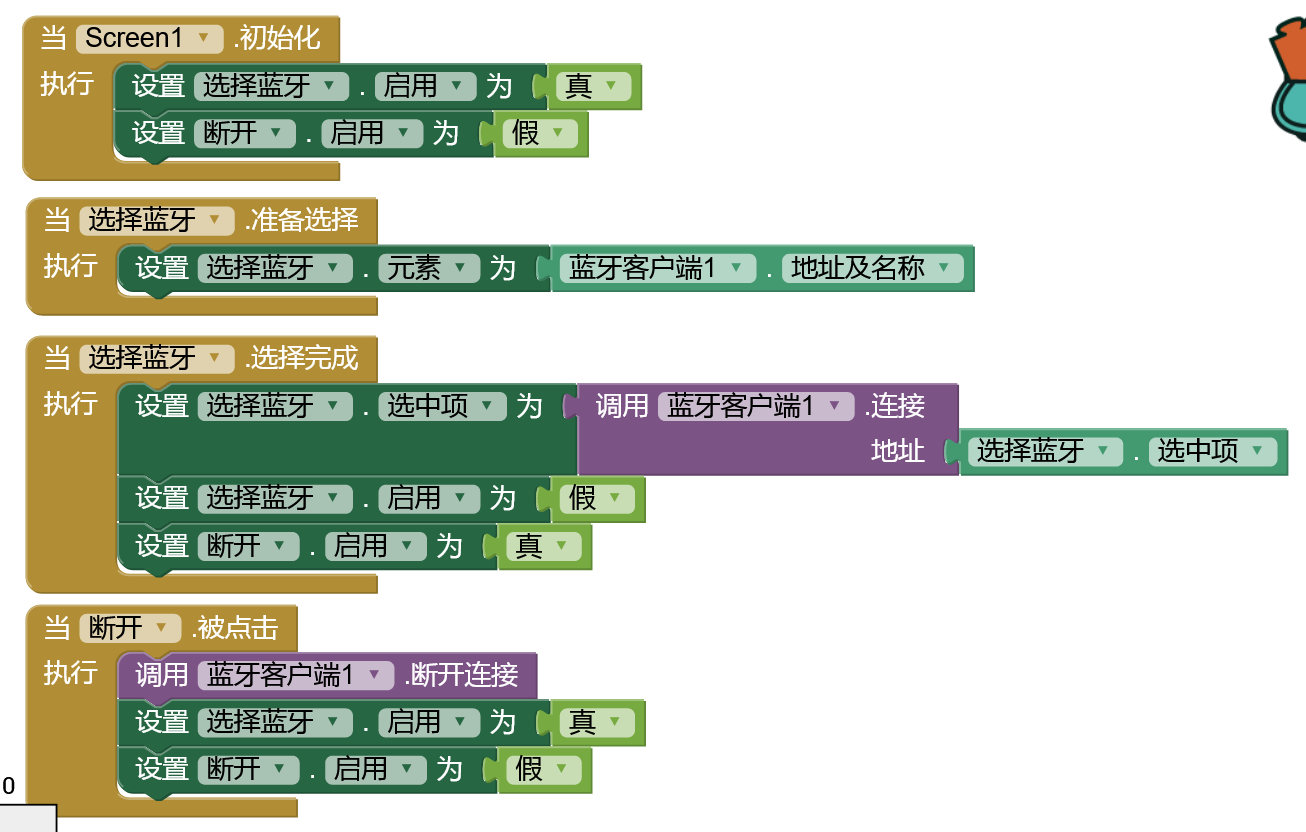 {#fig:app启动逻辑}
{#fig:app启动逻辑}
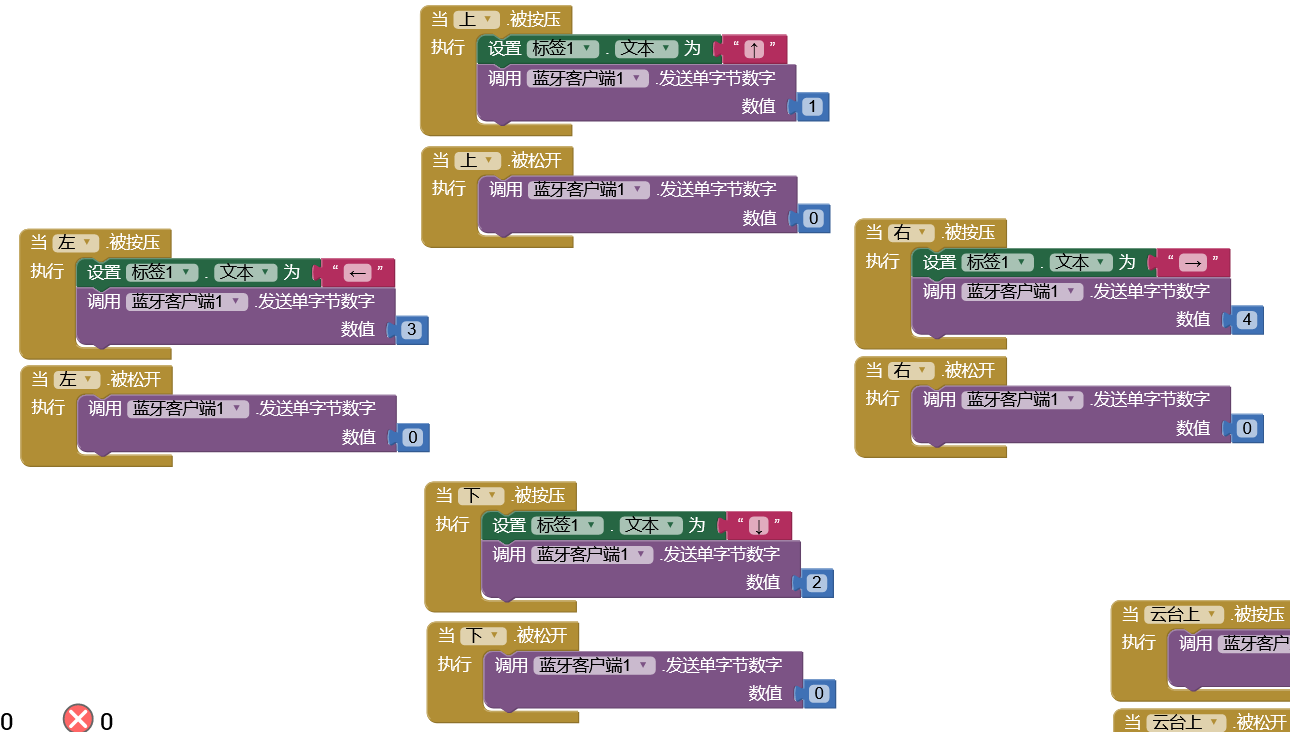 {#fig:app控制逻辑}
{#fig:app控制逻辑}
这里提供制作好的app(见工程apk文件夹),可以先用蓝牙模块和串口助手尝试。
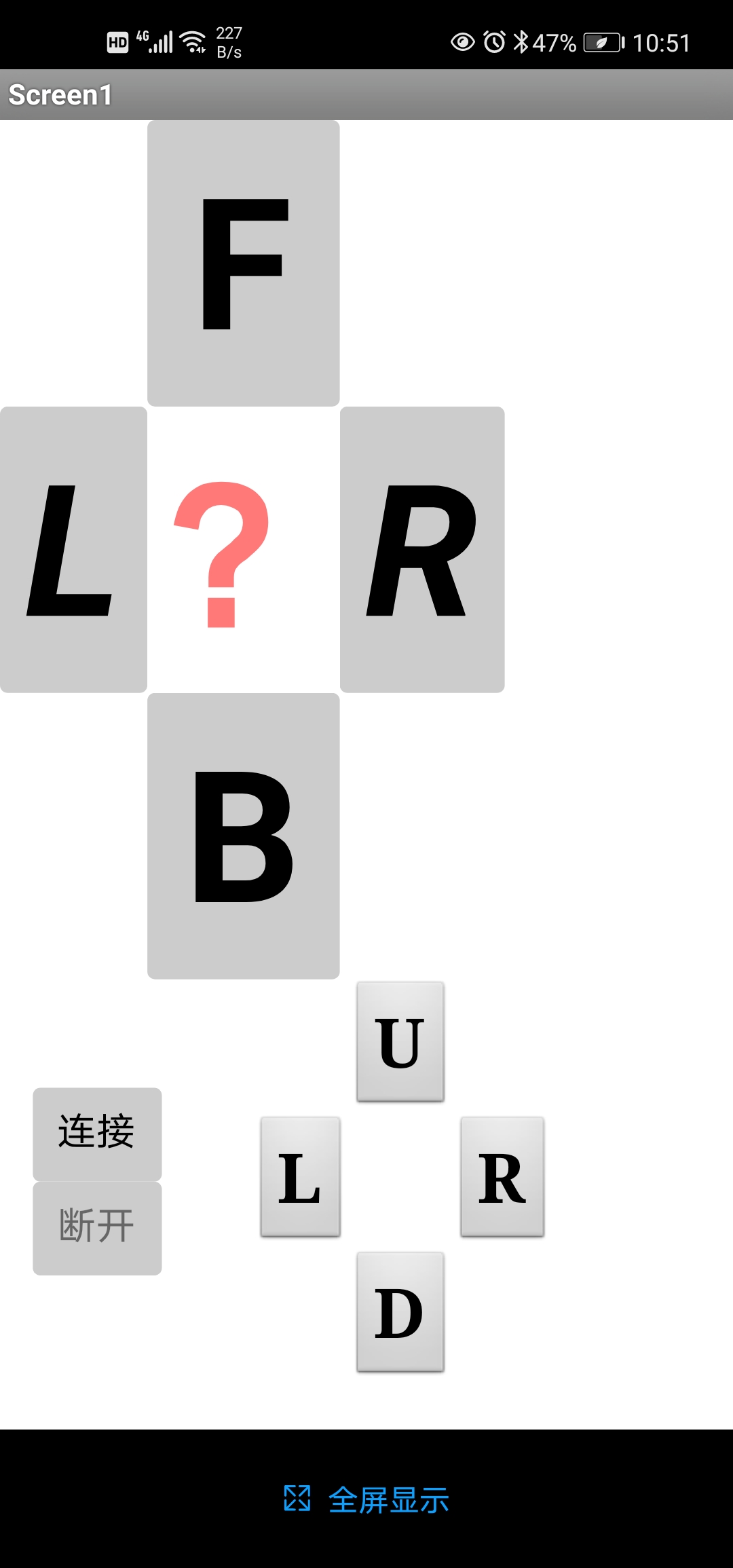 {#fig:手机app}
{#fig:手机app}
可以在app inventor导入附件中的aia文件,获取这个工程。
控制前后,我们再给两个标志位,还要再前面的速度环加一些东西。
//修改速度环
int velocity(int encoder_left,int encoder_right)
{
static float Velocity,Encoder_Least,Encoder,Movement = 0;
static float Encoder_Integral;
if(1==Flag_forward){
Movement=-180;
}
else if(1==Flag_retreat){
Movement=90;
}//这里前后的Movement不一样是因为我的车后面更重,后退的猛就容易倒
else{
Movement=0;
}
//=============speed PI controller==================//
Encoder_Least =(Encoder_Left+Encoder_Right)-0;
Encoder *= 0.8;
Encoder += Encoder_Least*0.2;
Encoder_Integral +=Encoder;
Encoder_Integral=Encoder_Integral-Movement;
转向环
前进后退就有了,我们再加一个转向PD环,这种算法控制下的平衡车并不能原地转,而是需要一个速度,在已有速度基础上让两个车轮产生速度差,才能实现转向。
//转向环
int turn(int encoder_left,int encoder_right,float gyro)//תÏò¿ØÖÆ
{
static float Turn_Target,Turn,Encoder_temp,Turn_Convert=10,Turn_Count;
float Turn_Amplitude=100,Kp=16,Kd=0;
if(1==Flag_left)
Turn_Target+=Turn_Convert;
else if(1==Flag_right)
Turn_Target-=Turn_Convert;
else
Turn_Target=0;
if(Turn_Target>Turn_Amplitude)
Turn_Target=Turn_Amplitude;
if(Turn_Target<-Turn_Amplitude)
Turn_Target=-Turn_Amplitude;
if(Flag_forward==1||Flag_retreat==1)
Kd=4;
else
Kd=0;
//=============turing PD controller==================//
Turn=-Turn_Target*Kp+gyro*Kd;
return Turn;
}
同时原来的中断函数也要修改。
//中断回调的部分
Balance_Pwm = balance_UP(roll, Mechanical_angle, gyrox);
Velocity_Pwm = velocity(Encoder_Left,Encoder_Right);
if(1==Flag_left||1==Flag_right)
Turn_Pwm =turn(Encoder_Left,Encoder_Right,gyroz);
else
Turn_Pwm=0.5*gyroz;
moto1 = Balance_Pwm - Velocity_Pwm - Turn_Pwm;
moto2 = Balance_Pwm - Velocity_Pwm + Turn_Pwm;
到此,能跑的蓝牙平衡车就做好啦。
但这样做出来的车还是非常臃肿不可靠,如果有能力的话,设计PCB板,把模块都集中在一个板上是最佳的方法,还可以加入旋转编码器、摇杆、小屏幕等方便调节参数。
下载
关注公众号小电动车,回复"平衡车"获取工程文件及其他资料,建议结合工程阅读本文。