大家好,我是小鱼。昨天刚说完天气,今天就狂风暴雨。
为了保证内容不水,争取每天都给大家讲一点新东西。
今天这篇文章是从《动手学ROS2》初稿中摘录的。主要来讲一讲ros2所使用的构建工具。
如果你用的是ros,而且每次还catkin_make ,请收下小鱼的鄙视眼神。
这里推荐你一个新的工具哈!ROS下就能用的。安装方法如下。
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu `lsb_release -sc` main" > /etc/apt/sources.list.d/ros-latest.list'
wget http://packages.ros.org/ros.key -O - | sudo apt-key add -
sudo apt-get update
sudo apt-get install python-catkin-tools
catkin 1.Colcon是个啥?
colcon其实是一个包构建工具,这个工具用来做什么的呢?
简单点说就是用来编译代码的,上几节跟大家讲了如何进行ROS2工作空间的创建,但没有说如何进行编译,其实就是用colcon。
ROS2默认是没有安装colcon的,所以小鱼就从如何安装colcon开始跟大家讲解colcon的使用方法。
colcon相当于ros1中的catkin工具,学过ros1的同学可以辅助理解。没学过也没关系,用多了自然也就懂了。
2.安装colcon
安装一句话,非常简单,快打开终端复制粘贴进去吧
sudo apt-get install python3-colcon-common-extensions
3. 编个东西测试一下
1.创建一个工作区文件夹colcon_test
mkdir colcon_tet && cd colcon_test1.下载个ROS2示例源码测试一下
git clone https://github.com/ros2/examples src/examples -b foxy1.编译工程
colcon build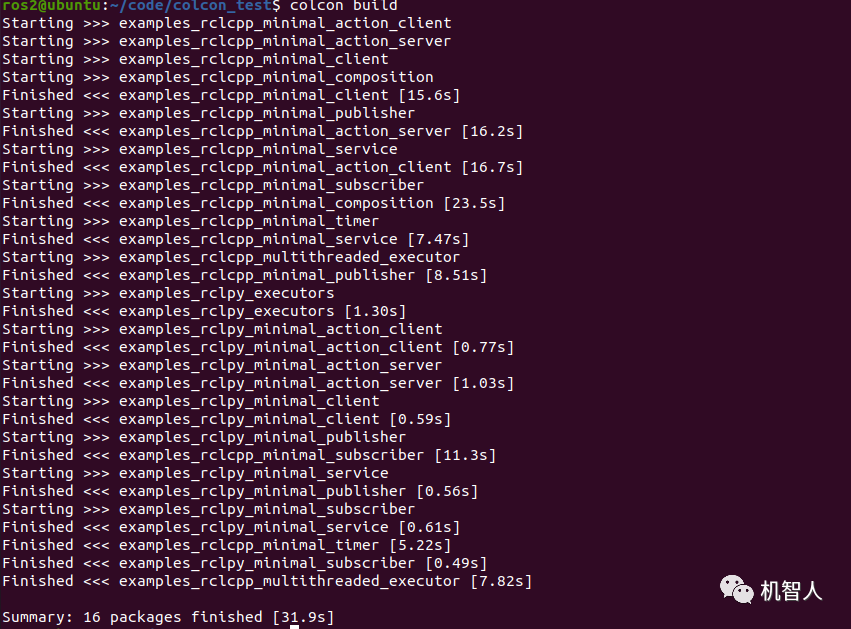
1.编完之后的目录结构

从一个src变成了四个,进来一个送你仨
4.运行一个自己编的节点
1.打开一个终端先source 一下资源
source install/setup.bash2.运行一个订杂志节点
ros2 run examples_rclcpp_minimal_subscriber subscriber_member_function3.打开一个新的终端,先source,再运行一个发行杂志节点
source install/setup.bashros2 run examples_rclcpp_minimal_publisher publisher_member_function

5.常用指令
只编译一个包
colcon test --packages-select YOUR_PKG_NAME不编译测试单元
colcon test --packages-select YOUR_PKG_NAME --cmake-args -DBUILD_TESTING=0运行编译的包的测试
colcon test允许通过更改src下的部分文件来改变install(重要)
colcon build --symlink-install这个小鱼要特别说一下,因为ros2的build没有ros中的devel概念了,如果想达到devel目录那样的效果,就需要加这个参数。没有学过ros的请主动忽略上面的话。
参考资料:
•colcon官方文档 https://colcon.readthedocs.io/en/released/user/installation.html•ROS2官网文档 https://docs.ros.org/en/foxy/Tutorials/Colcon-Tutorial.html
大家有问题可以第一时间告诉小鱼,如果遇到的人比较多,小鱼会写一篇文章来单独讲一讲的。
写在最后
我是小鱼,机器人领域资深玩家,现深圳某独脚兽机器人算法工程师一枚
目前在输出机器人学习指南、论文注解、工作经验,欢迎大家关注小鱼,一起交流技术,学习机器人
