机载LiDAR数据的获取具有可以不受地域地形限制、受天气影响较小、数据采集速度快、测量数据精度高、外业作业成本低、数据处理自动化程度高等特点。
一、丰富的数据类型
机载LiDAR系统以多种数据形式采集了大量被测对象信息,GPS数据、INS数据可以解算出的三维离散点云数据,同时还记录有反射强度数据以及高分辨数码相机获得测区的影像图。
(a) 点云数据

(b) 强度数据

© 真彩色影像
机载LiDAR系统获取的多种类型的数据
1、多回波特性
目前大多数商业LiDAR系统都能够提供多重回波数据,德国IGI公司和奥地利RIEGL公司联合制造的LiteMapper5600系统理论上可以同时获得无穷次回波数据。而实际作业中,超过5次以上回波的概率几乎为零。一般而言,只有地物点才会产生多次回波,而地面点只会产生一次回波,可见,激光脚点的回波次数和回波号本身可以揭示激光脚点的类型,这可以很好地为机载LiDAR数据的后处理提供辅助信息。具体而言,可以为数据后处理中激光脚点的分类、建筑物提取及三维重建、植被的冠层结构分析等提供依据。
同时,回波特性与机载LiDAR的植被穿透能力是密不可分的。机载LiDAR数据的这一特性使它成为目前唯一能快速获取大面积森林覆盖地区DEM的可行技术。
2、强度数据
机载LiDAR系统除了能获得多重回波数据之外,还能同时获得回波信号的强度。由于不同地物对于激光的反射程度是不一样的,理论上,利用强度信号可以把不同地物非常容易地区分开来,如表2-11所示。但是,目前研究所获得的具有反射强度的地物还是屈指可数,而且有些地物随着季节环境等的变化,反射强度值也会发生变化,如植被等,因此,仅利用强度数据进行地物分类暂时是不可行的。
表2-11 不同介质对激光的反射率值

同时,由于点云数据与影像的配准问题还没有得到彻底的解决,因此,多源数据的融合进行地物的分类和提取仍是亟待解决的问题。本文不考虑影像数据与强度信息。
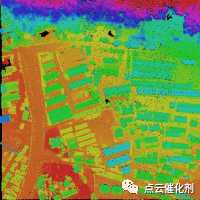
二、海量数据
现有激光雷达系统已能够提供每平方米十几个点的光斑密度,一块1km图片1km 测区将包含有10000000个激光脚点,其数据文件大小为420Mb。这还只是一个小面积的粗略概算,实际工程中测区的面积可达几千平方公里甚至数万平方公里。这么大范围内的激光脚点构成的海量数据对压缩存储、数据处理环境、软件计算效率等都提出了很高的要求。而且,这还是仅仅是考虑了激光点云的数据,如果考虑了同时获取的影像数据,则机载LiDAR的数据量更大。因此,如何进行数据压缩和化简,得到各种工程所需的满足一定分辨率要求的LiDAR数据也成为目前研究的热点之一。

机载LiDAR海量点云数据示意图
三、激光脚点密度不均匀
由于激光扫描仪所采用的扫描方式不同,激光脚点在扫描带中的分布也不均匀,不同位置的光斑密度不同。例如,由圆锥扫描方式所得到的数据中扫描带两侧数据密度大,中间部分稀;由线扫描方式所得到的数据特点与圆锥扫描方式类似;而由光纤扫描方式所得到的数据中扫描线方向上的光斑密度大于垂直扫描线方向上的光斑密度。此外,飞机的飞行速度及高度、扫描仪与地形/地物的相对位置/方向等的变化,激光的发射功率、视场角FOV、采样频率等都会使激光脚点分布不均匀。因此,给定的激光脚点的采样间隔只是个平均值,在实际计算密度或者进行栅格化时,必须考虑原始数据不均匀的特性。

激光脚点分布不均匀示意图
四、航带覆盖面积较小
受激光雷达技术数据获取方式和硬件条件所限,激光雷达的扫描带覆盖面积较小。在飞行高度、速度、时间、航摄航带重叠度相同的条件下,相机(75度视场)覆盖面积是激光扫描仪(30度扫描宽度)的2.9倍(Baltsavias,1999)。这意味着为获得相同的覆盖面积,需要对更多的扫描条带进行拼接等处理。同时,航带覆盖面积小也可以避免大量建筑物等的遮蔽,减少盲区,有利于地形、地物信息的提取。
五、 获取同名点困难
同名点在摄影测量、计算机视觉的诸多应用中扮演着重要的角色。尽管激光雷达技术可以直接获取地面点的三维坐标,从理论上讲不需要进行匹配、纠正等处理,但由于IMU/DGPS仪器误差或集成的问题,相邻扫描带间的点在高程和平面位置存在一些差异,必须经过必要的处理才能获得整个测区的数据。此外,对离散的点云数据形式还需要开发新的处理方法。因为,从激光雷达工作方式和数据特点分析,在相邻扫描带中获得同名点的可能性很小。如何获得同名点就成为一个摆在人们面前的新问题。
六、存在数据盲区或者数据空洞区域
机载LiDAR数据内部常常存在大面积的数据盲区。数据缺失主要由四方面原因引起:一是缺少条带间的覆盖。通常激光扫描条带间是需要一定宽度的重叠以保证连续的数据覆盖,但是由于飞机飞行时偏航、摇晃、倾斜等原因会产生数据缺值域。二是系统故障。三是具有高吸收性的物质把激光的入射波吸收了,没有反射波进入激光接收器,没有数据记录。如纯净的水体会产生镜面反射,出现的数据盲区。四是位于扫描带边缘的建筑物遮挡,产生了数据缺失,类似于SAR系统中的雷达盲区。大面积数据空洞区域的存在,要求我们在具体的应用时,需要对这些区域进行特殊的处理。

机载LiDAR的数据缺失示意图
七、缺少光谱信息
激光雷达系统能够直接获得被测点位三维坐标和强度信息,却忽略了反映对象特征的光谱信息。光谱信息对不同对象的识别有重要的作用。尽管配备的数码相机能够获取同一区域的影像,但在两种数据的配准问题没有得到彻底解决以前,从影像上获取的光谱信息具有较大的误差。而随着LiDAR系统硬件的不断完善,LiDAR设备也能获取多波段的光谱信息或配套的影像数据。

[参考文献] 王丽英. 机载LiDAR数据误差处理理论与方法[M]. 测绘出版社, 2013