一般机载LiDAR数据量很大,如何有效地组织这些数据直接影响到数据处理效率和精度。目前,出现了多种机载LiDAR数据的组织形式,每种数据的组织形式都有其各自的优缺点。
1、离散的三维激光点云
直接利用最原始的点云数据进行数据处理不会产生插值等误差,但由于点云数据量庞大、缺少点间拓扑关系难以进行有效的数据组织、计算机速度和内存限制等各原因,机载LiIDAR数据的实时渲染和处理仍没有得到很好的解决。
2、规则格网
规则格网就是规则间隔的正方形格网点组成的影像阵列,每个格网点和其它周围格网点的拓扑关系已经隐含在该阵列的行列号中。离散的激光脚点通过一定的插值方法内插成规则格网,简化了数据组织方式,提高了数据处理效率,并可以利用成熟的图像处理方法,但在插值的过程中会产生一定的误差。
3、伪格网索引表示
伪格网索引是一种简单的表示,与规则格网数据结构相比,伪格网不需要对原始数据进行内插,也是按照一定的单元格大小将数据划分成格网,每一格网存储落在其内部的数据,每个点的邻域只需要考虑相邻格网内的点。但伪格网内的激光脚点之间仍然没有拓扑关系。这一索引通过把整个数据集分为若干个小块数据集后,再进行数据处理,可以极大地提高大数据量、复杂程序的运算速度。由于,机载LiDAR数据量大,很多数据后处理算法设计复杂,使用伪格网索引已经十分普遍。
4、不规则三角网
即把采集的数据点根据一定的规则连接成覆盖整个区域且互不重叠的多个三角形,即可构成一个不规则三角网,如图2-32所示。不规则三角网可以较好地表达地貌特征,在最大范围内利用了原始激光点,但是这种方法的一个缺点就是难以表达地形的突变,而且需要重构和维护点间全局一致的拓扑关系,增加存储和传输的困难。而且当原始数据在一个局部的二维区域内有多个不同高程点交替起伏时,会产生严重的锯齿现象,不利于数据处理。另外,如果用二维邻域中最高点(或最低点)进行数据表达,会丢失房屋墙面上或穿透植被树冠的多次回波点。
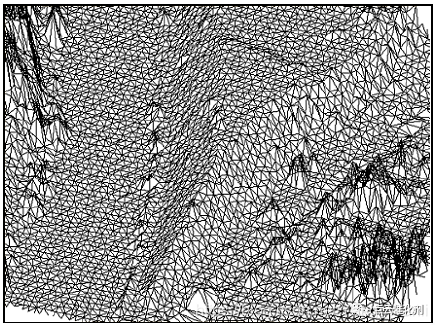
图2-32 不规则三角网组织的数据示意图
5、剖面
机载激光雷达能够接受多次回波的信号,带来了更多的Z方向的信息,有利于表达如高层建筑和地形变化陡峭的地方如悬崖等。基于此Sithole和Vosselman(2003)提出一种利用剖面描述离散激光脚点的方法,并以此为基础进行分割。它通过两组相互垂直(X和Y方向)的二维剖面集合表现三维空间,并使用线段组织剖面上的离散点。线段连接过程从剖面的第一个点开始,当两点间存在明显的高度或坡度差时结束这一个折线段的连接,继续搜索新的连接(如图2-33所示)。Shan(2005)利用这种数据组织方式进行了滤波,通过一系列X方向上的剖面判断每个激光脚点属于地面或地物。利用这种数据组织结构,优点是既可以保留原始数据,又可以保留地形的突变,而且由于是二维运算,运算效率较高,缺点是剖面对坡度变化比较敏感。
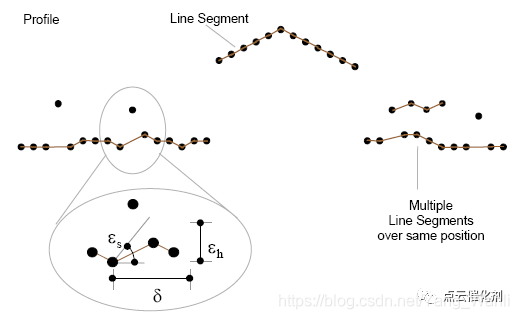
图2-33 剖面数据结构及其原理示意图(Sithole and Vosselman,2003)
6、基于几何索引的点集的表示
在有些数据没有原始扫描线排列信息,需要直接以三维点云的点集存储和处理,而三维离散的点云没有拓扑信息,不能得到数据处理需要的邻域信息时,为了实现对数据邻域的快速检索和查询,需要一个高效的检索数据结构,逆向工程中常用的空间几何索引数据结构很多,而把其引入机载LiDAR数据用于组织地表信息的目前有以下三种:
① 基于KD-树的空间索引方式
蒋晶珏在其博士论文中提出用KD-树组织LiDAR数据,这种方式无需存储和维护全局一致的拓扑关系,可以简单高效地对LiDAR点云数据进行组织。
② 基于BSP树的空间索引方式
黄先锋其博士论文中提出了利用建筑物特征线和面片在基于BSP树的约束下对屋顶面片分裂合并的建筑物模型重建算法。在BSP树中,每个结点用它的线性半空间等式来表示,在二维空间中它是一条直线,在三维空间中它是一个平面。同样在二维空间中每个结点块是个凸多边形,而在三维空间中它是一个凸多面体。
③ 链式四叉树
链式四叉树是在读取数据文件的时候,首先获取数据文件的x,y,z的最大最小值,用于建立四叉树的根结点,获取最大最小值后,将最大最小值赋给对应的变量,并对四个子结点赋空,用于将其标识为叶子结点。根结点创建之后,需要读取数据文件,每读入一个点,创建一个点类(CDot)对象,为其赋予一个ID号,这个ID信息存储在点类对象中,并把这个对象保存在对象数组中,然后根据该点所属的区域,将该ID插入到四叉树中,其插入的过程是个递归调用的过程。陈刚认为这一方法对系统资源要求高。黄先锋提出了一种通过将点云均匀布置在顺序编码四叉树上,绘制中实时对节点进行裁切,并通过自适应控制绘制的数据量,解决实时渲染大量LIDAR点云数据的问题。
7、体元
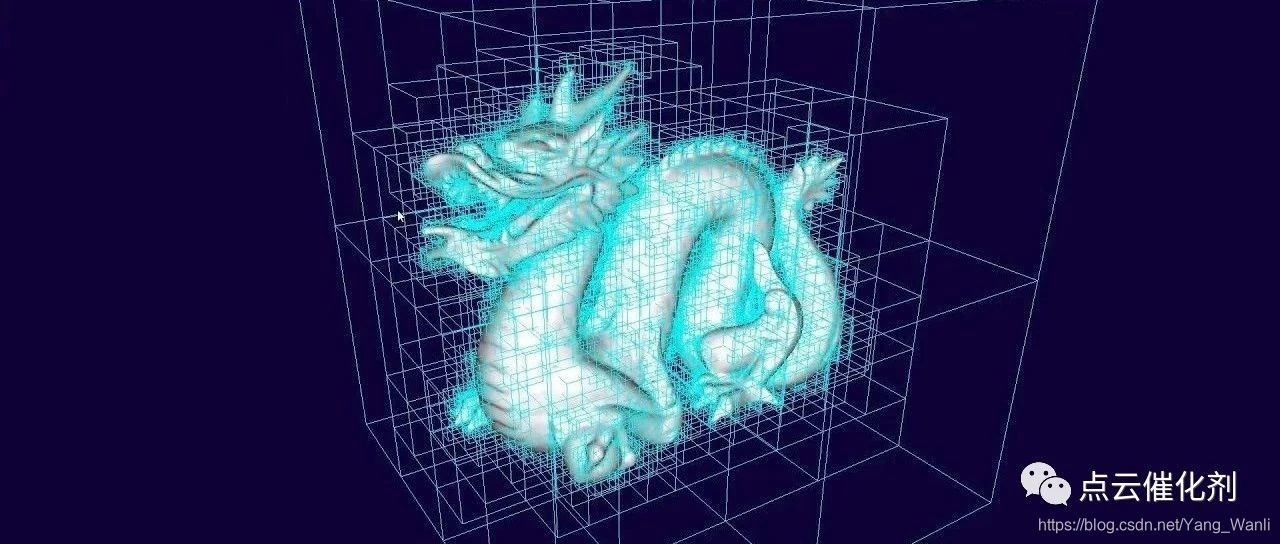
体元是表达三维空间的基本单位,其作用与二维平面中的像素类似。体元的形状可以是长方体、正方体,也可以是圆柱体。体元可以记录多个不同类型的值,如高程、回波强度、数据点个数、光谱信息、密度、材质等。一种最简单的方式是仅记录体元内是否有激光脚点(Sroker,2004)。根据Sroker的观点,采用体元表达LiDAR数据具有的优势包括:对环境及其复杂性不敏感、与观察角度无关、具有表达采样及模拟数据集的能力、可以表达对象内部特征及不规则对象(云、烟等)、支持各种块操作等。其不足之处包括:采用离散形式存储、损失了空间(关系)特征、对系统资源要求高(梁欣廉,张继贤等,2005)。
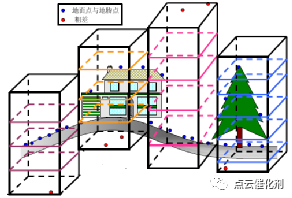
图2-34 基于体元的机载激光脚点数据组织
[参考文献] 王丽英. 机载LiDAR数据误差处理理论与方法[M]. 测绘出版社, 2013