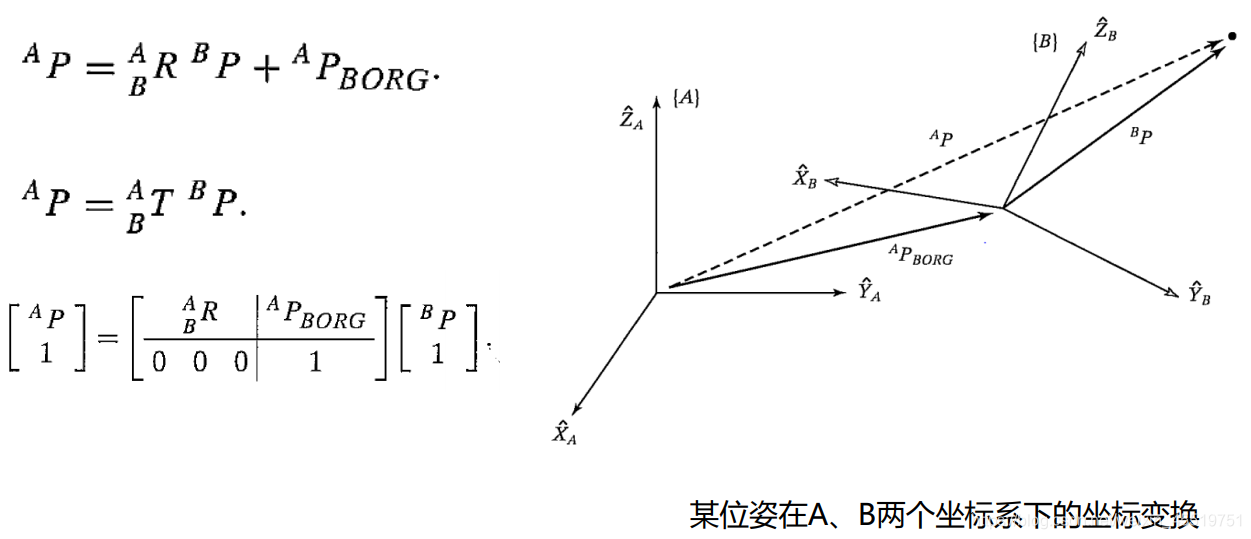
一、机器人中的坐标变换和ROS的TF功能
机器人中的坐标变换需要去看《机器人学》教材,这里不细讲。
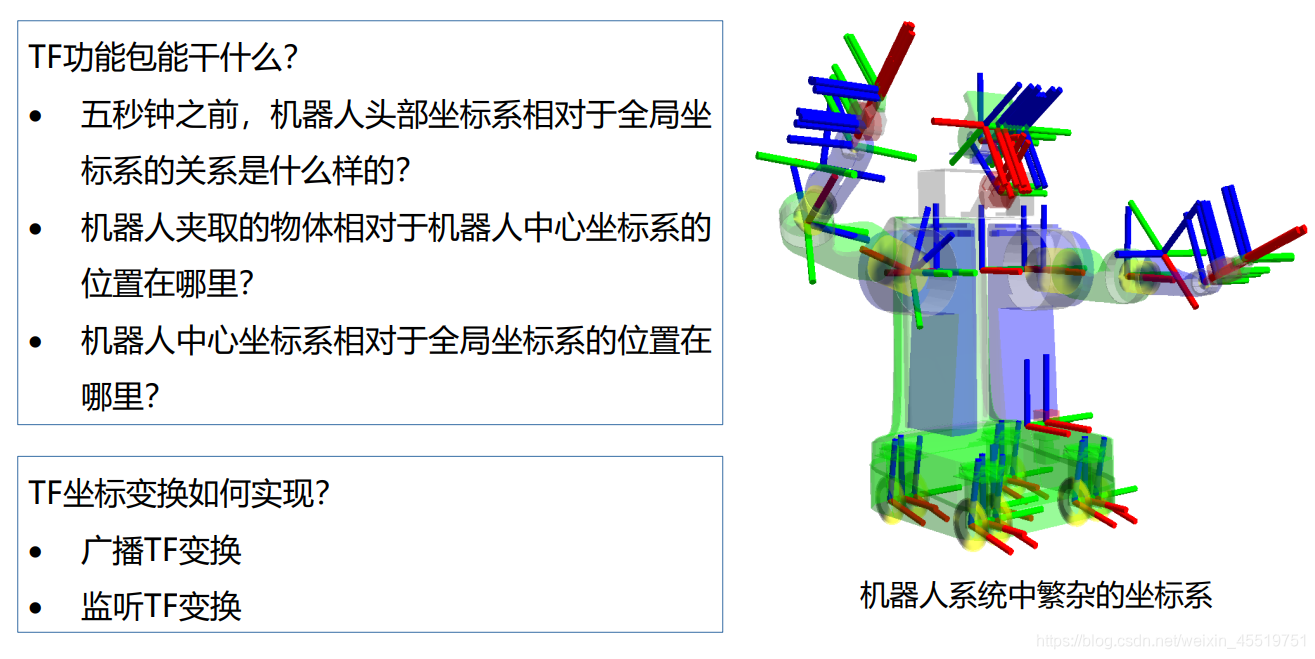
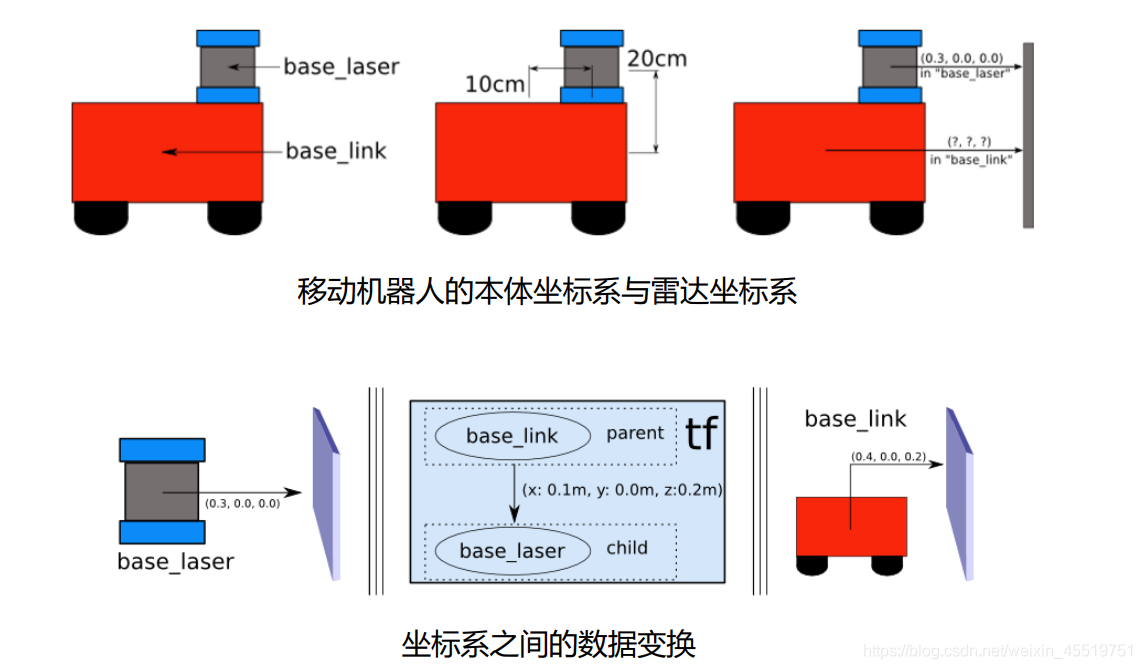
ROS的TF功能:
二、机器人中的坐标变换实例
2.1小海龟运动
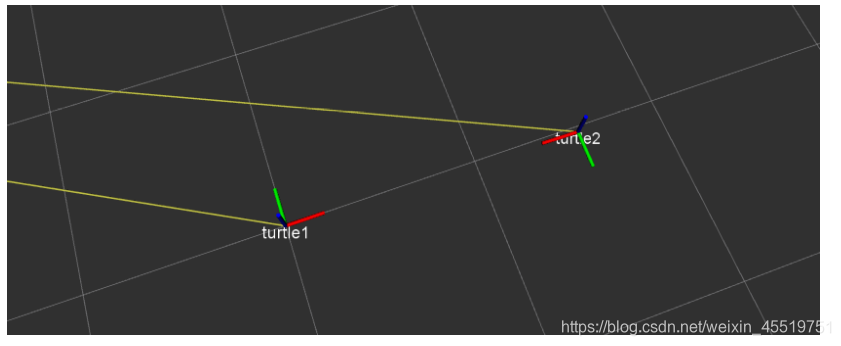
实例是,运行turtle_tf_demo.launch,此程序可以自动自动两个小海龟,你控制turtle1海龟运动,那么turtlr2海龟就会跟随turtle1海龟直至撵上。
操作如下:
$ sudo apt-get install ros-melodic-turtle-tf
$ roslaunch turtle_tf turtle_tf_demo.launch
$ rosrun turtlesim turtle_teleop_key
2.2view_frames可视化工具
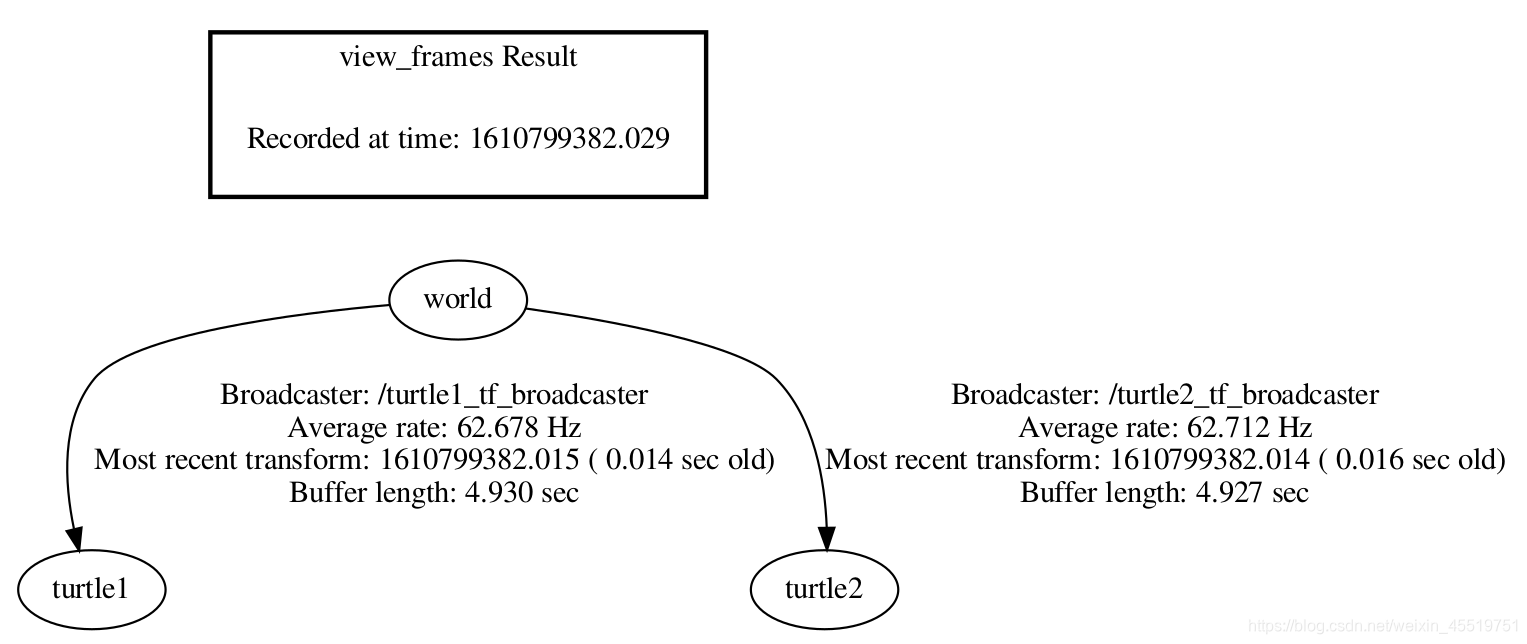
可以可视化的查看系统中所有TF之间的关系的小程序:view_frames
$ rosrun tf view_frames
其中,生成的frames.pdf文件在主目录里面
下图中的world是指基坐标系,其位于小海龟仿真器的左下角。turtle1和turtle2是两个小海龟的坐标系。
2.3 tf_echo工具
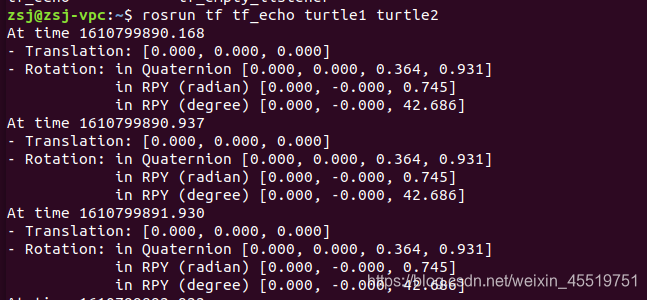
tf_echo工具作用:是turtle2坐标系通过怎样的translation和Rotation变换去撵上turtle1。
其实,translation和Rotation就是表述了turtle1和turtle2之间的一个向量,既然知道了这个向量(距离),那我们设置好时间,就可以设置turtle2追赶turtle1的速度了。
rosrun tf tf_echo turtle1 turtle2
2.4 RVIZ可视化
运行如下命令打开 RVIZ
$ rosrun rviz rviz -d `rospack find turtle_tf`/rviz/turtle_rviz.rviz
把 RVIZ左上角的fixed frame选择world
点击左下角的add添加TF