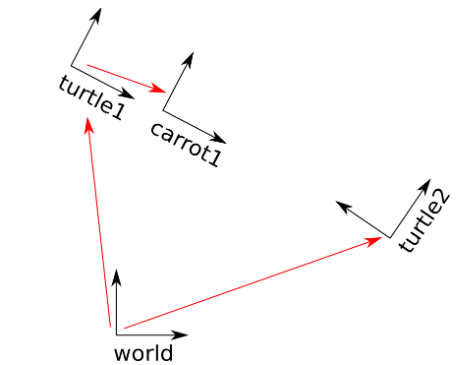
前言:在前面的试验中,我们分别有wolrd,turtle1和turtle2三个坐标系,并且world是turtle1和turtle2的父坐标系。现在我们来新建一个自定义坐标系,让turtle2跟着新的坐标系”carrot“运动。
参考自:http://wiki.ros.org/tf/Tutorials/Adding%20a%20frame%20%28C%2B%2B%29
一、新建源文件
新建frame_tf_broadcaster.cpp文件,内容如下:
#include <ros/ros.h> #include <tf/transform_broadcaster.h> int main(int argc, char** argv){ ros::init(argc, argv, "my_tf_broadcaster"); ros::NodeHandle node; tf::TransformBroadcaster br; tf::Transform transform; ros::Rate rate(10.0); while (node.ok()){ //创建一个新坐标系carrot1,距离父坐标系turtle1距离2米 transform.setOrigin( tf::Vector3(0.0, 2.0, 0.0) ); transform.setRotation( tf::Quaternion(0, 0, 0, 1) ); br.sendTransform(tf::StampedTransform(transform, ros::Time::now(), "turtle1", "carrot1")); rate.sleep(); } return 0; };
二、修改launch文件
在launch文件中添加代码:
<launch> ... <node pkg="learning_tf" type="frame_tf_broadcaster" name="broadcaster_frame" /> </launch>
三、修改广播信息
修改turtle_tf_listener.cpp文件
listener.lookupTransform("/turtle2", "/carrot1", ros::Time(0), transform);
四、运行
编译并运行launch文件
roslaunch learning_tf start_demo.launch
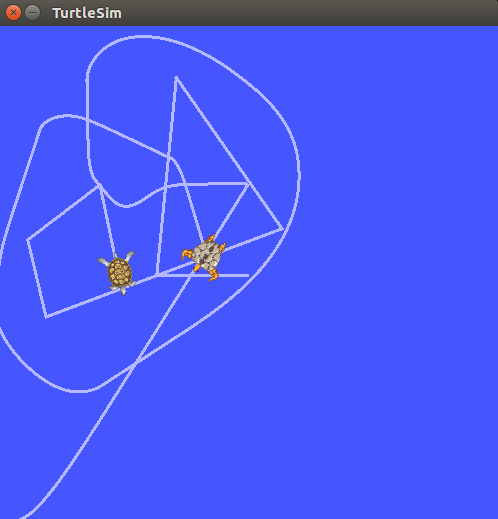
现在turtle2始终跟随在carrot坐标系运动。
-END-