一、机器人中的坐标变换
TF功能包用来管理所有的坐标系。它可以记录十秒钟之内所有坐标系之间的关系,可以展示夹取的物体相对于机器人中心坐标系的位置在哪里。
二、举例:小海龟跟随实验
1. 小海龟跟随
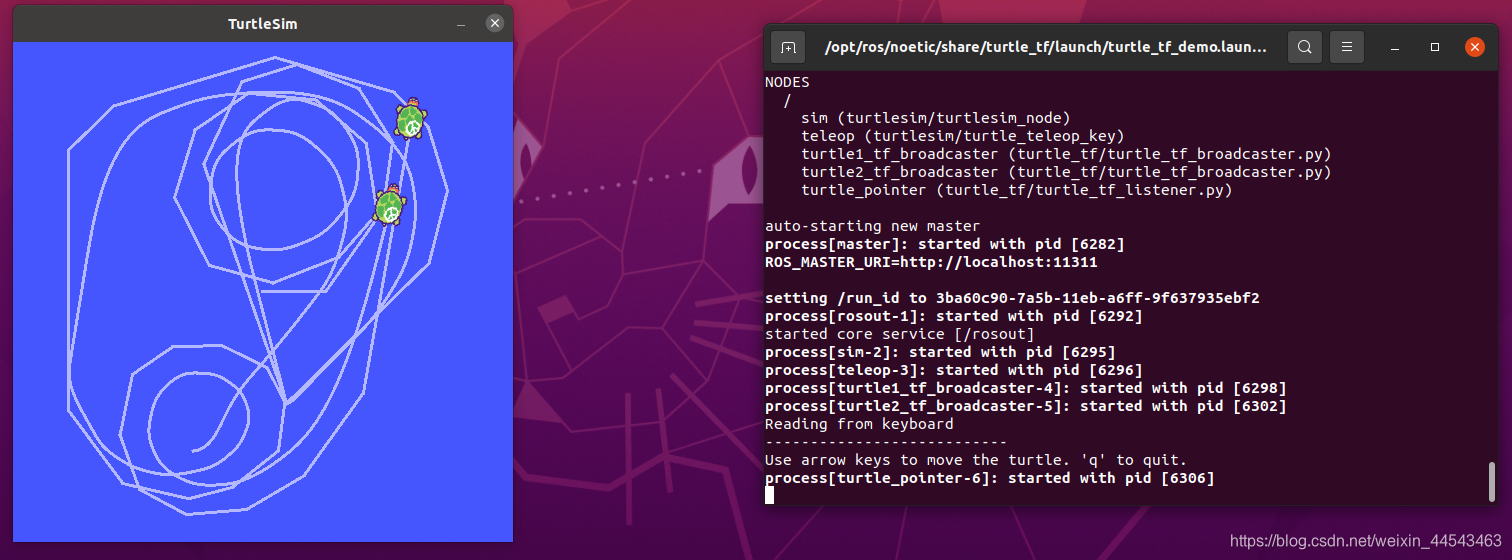
两只海龟出现之后,一只海龟在中心点,另一只海龟出现在下方,可以控制中心的海龟进行运动,下方的海龟会自动跟随我们控制的海龟进行运动
sudo apt-get install ros-noetic-turtle-tf
roslaunch turtle_tf turtle_tf_demo.launch
#rosrun turtlesim turtle_teleop_key
其中roslaunch用来启动脚本文件,启动其中的很多节点
其中的noetic为ROS版本号
在terminal中按方向键即可控制被跟随的乌龟。
如果ubuntu20.04 noetic版本出现报错可以参考下面的方法解决
cd /usr/bin sudo rm -r python # 有的可能没有这个文件,就省略这一步 sudo cp python3 python
2. 查看tf关系
rosrun tf view_frames
等待5秒,生成一个pdf文件,打开可以看到当前系统中tf坐标的位置关系。
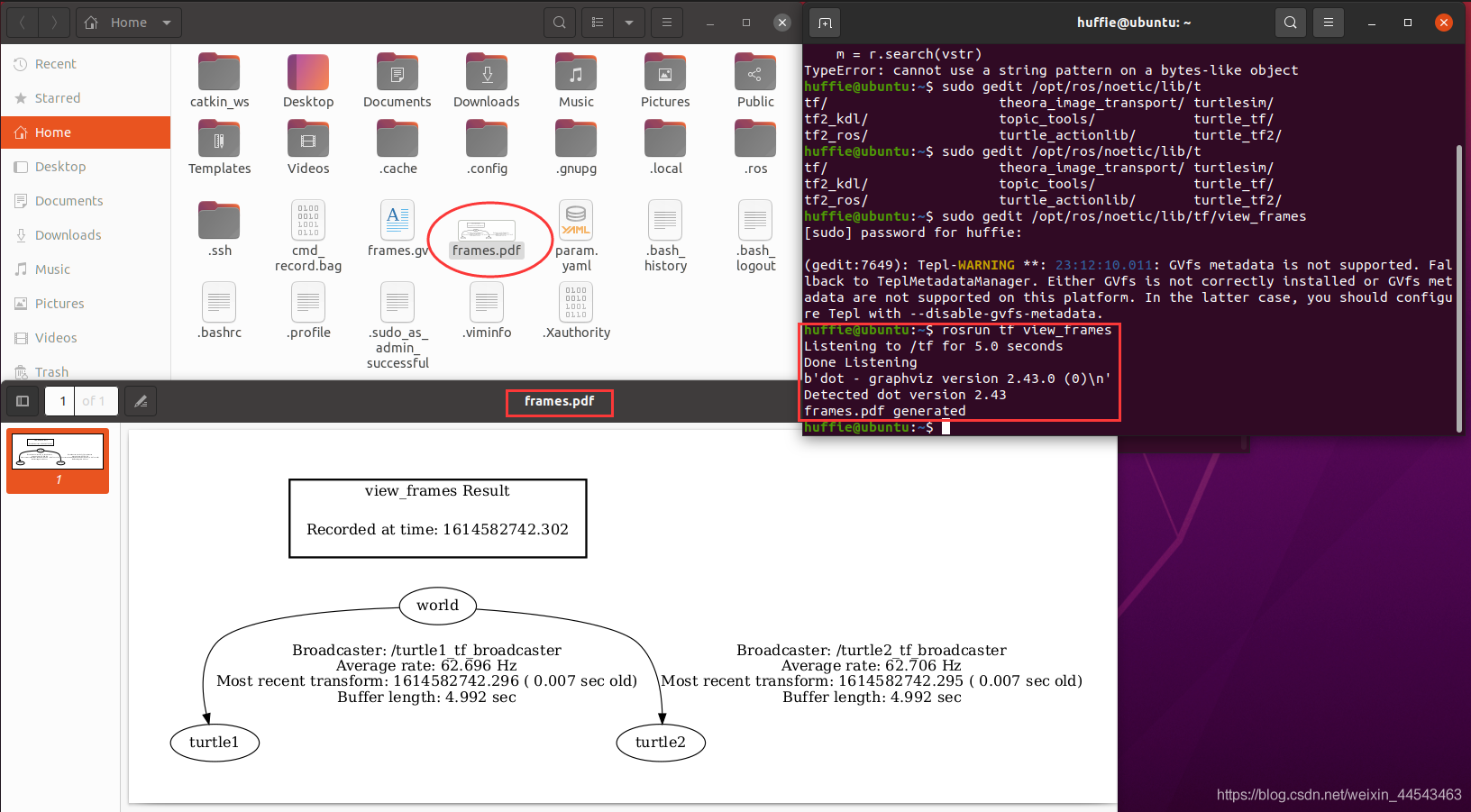
其中world是全局坐标系,另外的turtle1和turtle2是两只海龟上的坐标系。例程的目的是使两个坐标系在坐标上是重叠的。
此步如果出错则需要执行修改报错的文件
sudo gedit /opt/ros/noetic/lib/tf/view_frames
在第88行print(vstr)上方添加一句vstr=str(vstr)就可以了
3. tf_echo坐标关系
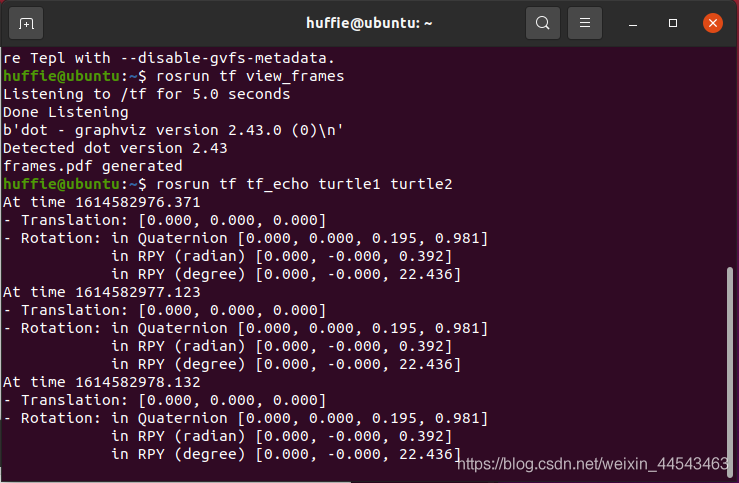
rosrun tf tf_echo turtle1 turtle2
输出两个坐标系之间的关系,描述turtle2坐标系如何变换到turtle1坐标系。包括Translation平移和Rotation旋转(四元数、弧度、角度三种方式描述旋转)。
4. rviz三维可视化显示平台
rosrun rviz rviz -d 'rospack find turtle_tf' /rviz/turtle_rviz.rviz
首先将左侧Fixed Frame改成world
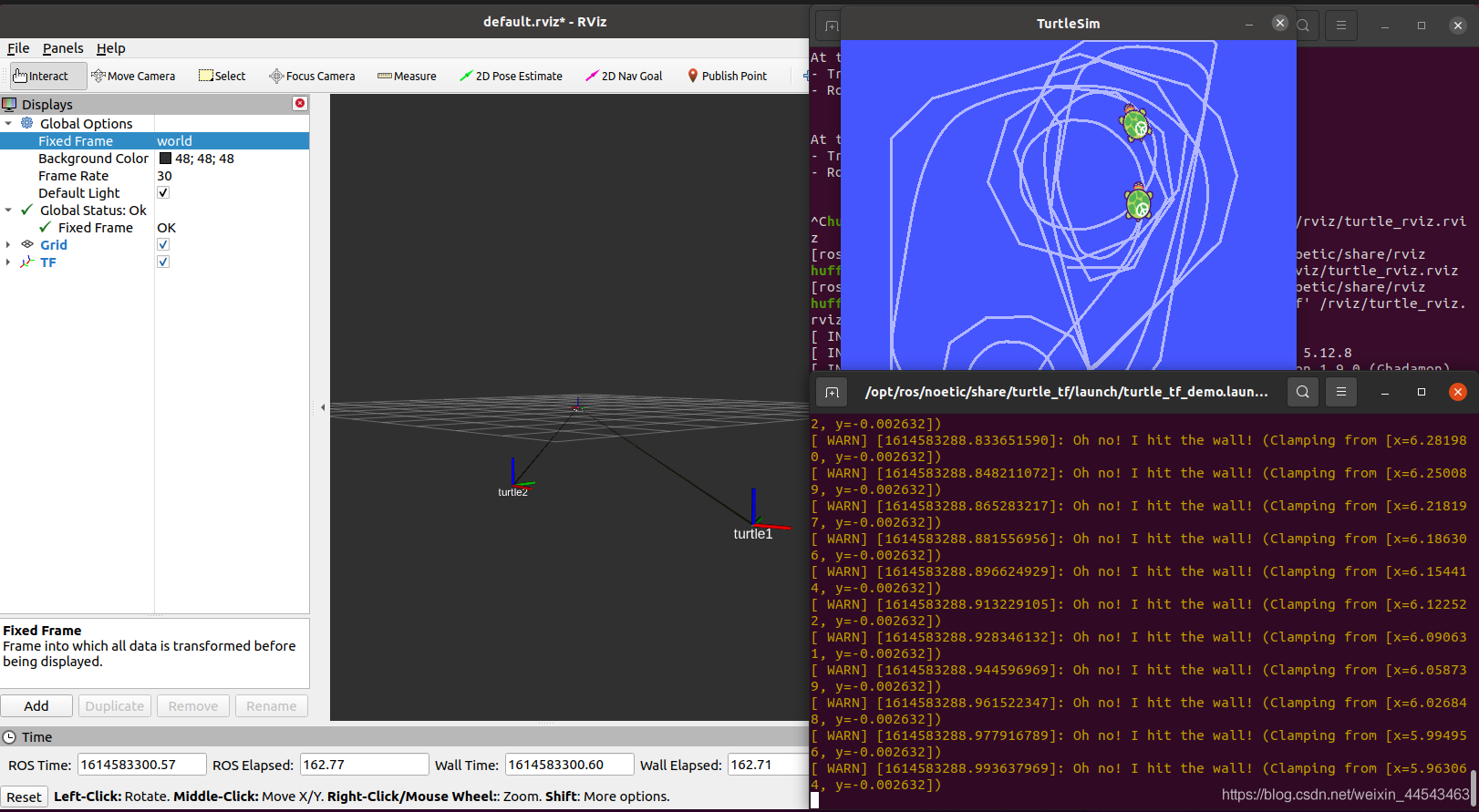
点击左下方Add,添加一个TF,用来显示TF位置关系
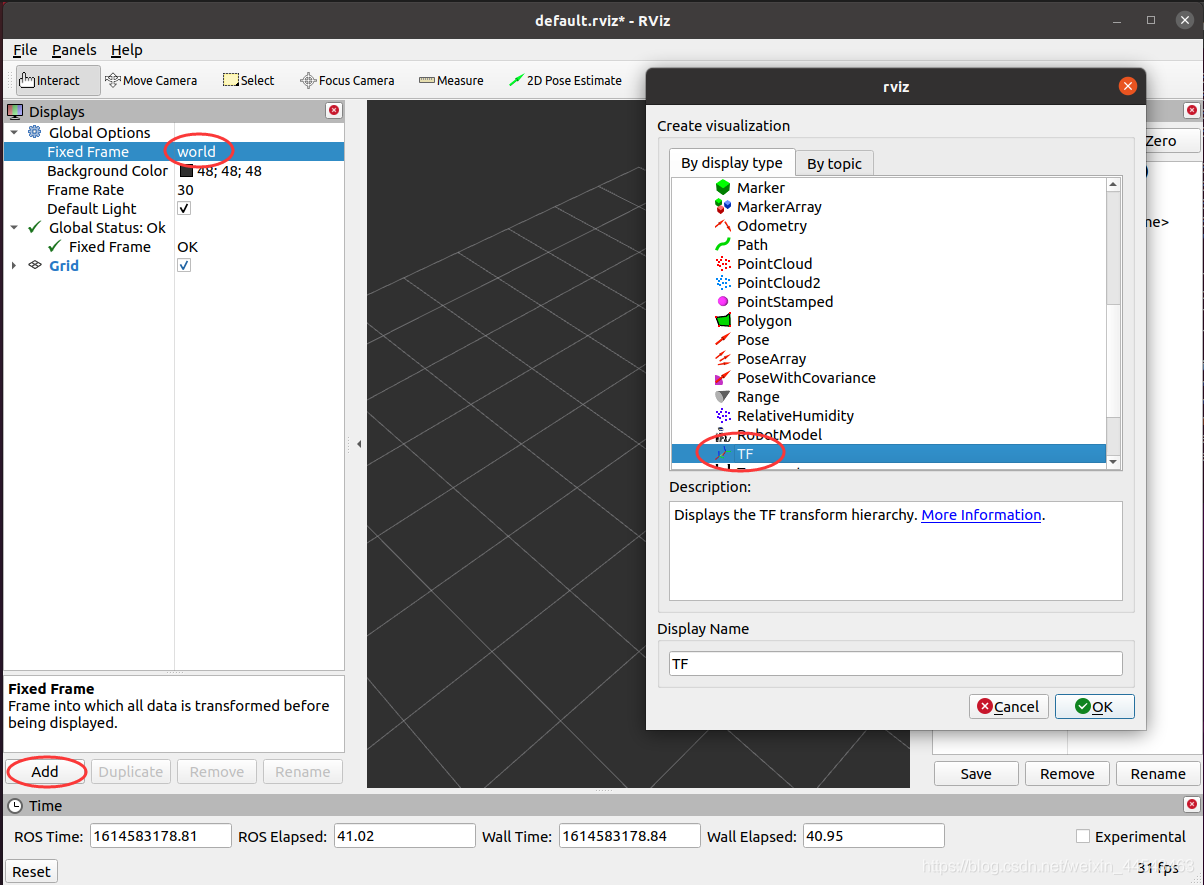
控制海龟运动,可以看到图中两个坐标系在运动
三、TF坐标系广播与监听的编程实现
1. 创建功能包
cd ~/catkin_ws/src
catkin_create_pkg learning_tf roscpp rospy tf turtlesim
2. 创建tf广播器代码
打开learning_tf/src/目录,在其中创建一个turtle_tf_broadcaster.cpp
其内容为:
/**
* 该例程产生tf数据,并计算、发布turtle2的速度指令
* REFERENCE:www.guyuehome.com
*/
#include <ros/ros.h>
#include <tf/transform_broadcaster.h>
#include <turtlesim/Pose.h>
std::string turtle_name;
void poseCallback(const turtlesim::PoseConstPtr& msg)
{
// 创建tf的广播器
static tf::TransformBroadcaster br;
// 初始化tf数据
tf::Transform transform;
transform.setOrigin( tf::Vector3(msg->x, msg->y, 0.0) );
tf::Quaternion q;
q.setRPY(0, 0, msg->theta);
transform.setRotation(q);
// 广播world与海龟坐标系之间的tf数据
br.sendTransform(tf::StampedTransform(transform, ros::Time::now(), "world", turtle_name));
}
int main(int argc, char** argv)
{
// 初始化ROS节点
ros::init(argc, argv, "my_tf_broadcaster");
// 输入参数作为海龟的名字
if (argc != 2)
{
ROS_ERROR("need turtle name as argument");
return -1;
}
turtle_name = argv[1];
// 订阅海龟的位姿话题
ros::NodeHandle node;
ros::Subscriber sub = node.subscribe(turtle_name+"/pose", 10, &poseCallback);
// 循环等待回调函数
ros::spin();
return 0;
};
3. 创建监听器listener代码
同样的,再创建一个turtle_tf_listener.cpp,其内容为
/**
* 该例程监听tf数据,并计算、发布turtle2的速度指令
* REFERENCE:www.guyuehome.com
*/
#include <ros/ros.h>
#include <tf/transform_listener.h>
#include <geometry_msgs/Twist.h>
#include <turtlesim/Spawn.h>
int main(int argc, char** argv)
{
// 初始化ROS节点
ros::init(argc, argv, "my_tf_listener");
// 创建节点句柄
ros::NodeHandle node;
// 请求产生turtle2
ros::service::waitForService("/spawn");
ros::ServiceClient add_turtle = node.serviceClient<turtlesim::Spawn>("/spawn");
turtlesim::Spawn srv;
add_turtle.call(srv);
// 创建发布turtle2速度控制指令的发布者
ros::Publisher turtle_vel = node.advertise<geometry_msgs::Twist>("/turtle2/cmd_vel", 10);
// 创建tf的监听器
tf::TransformListener listener;
ros::Rate rate(10.0);
while (node.ok())
{
// 获取turtle1与turtle2坐标系之间的tf数据
tf::StampedTransform transform;
try
{
listener.waitForTransform("/turtle2", "/turtle1", ros::Time(0), ros::Duration(3.0));
listener.lookupTransform("/turtle2", "/turtle1", ros::Time(0), transform);
}
catch (tf::TransformException &ex)
{
ROS_ERROR("%s",ex.what());
ros::Duration(1.0).sleep();
continue;
}
// 根据turtle1与turtle2坐标系之间的位置关系,发布turtle2的速度控制指令
geometry_msgs::Twist vel_msg;
vel_msg.angular.z = 4.0 * atan2(transform.getOrigin().y(),
transform.getOrigin().x());
vel_msg.linear.x = 0.5 * sqrt(pow(transform.getOrigin().x(), 2) +
pow(transform.getOrigin().y(), 2));
turtle_vel.publish(vel_msg);
rate.sleep();
}
return 0;
};
4. 配置tf广播器与监听器代码编译规则
配置learning_tf中的CMakeLists.txt,在图示位置添加如下代码
add_executable(turtle_tf_broadcaster src/turtle_tf_broadcaster.cpp)
target_link_libraries(turtle_tf_broadcaster ${catkin_LIBRARIES})
add_executable(turtle_tf_listener src/turtle_tf_listener.cpp)
target_link_libraries(turtle_tf_listener ${catkin_LIBRARIES})
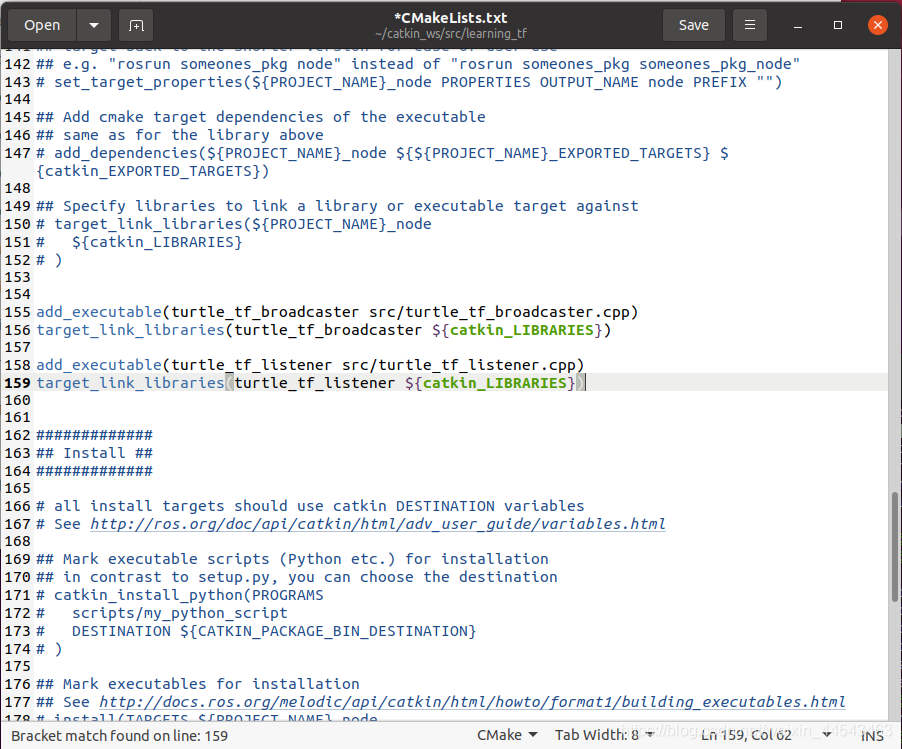
即分别把两个cpp文件编译成两个可执行文件,然后对库进行链接。
5. 编译
cd ~/catkin_ws
catkin_make
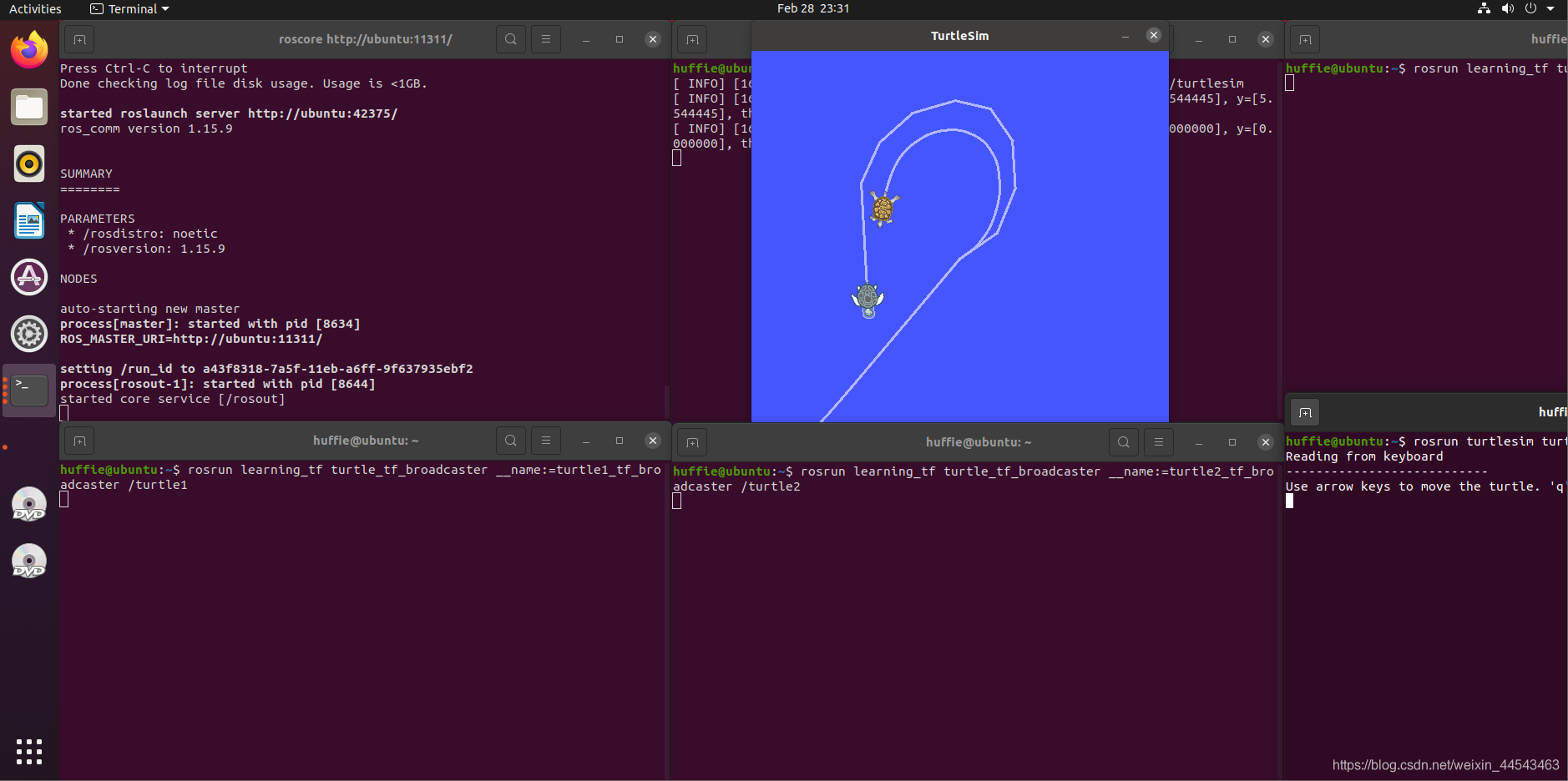
6. 运行程序
以下程序每一行均需要一个单独的terminal运行。
roscore
rosrun turtlesim turtlesim_node
rosrun learning_tf turtle_tf_broadcaster __name:=turtle1_tf_broadcaster /turtle1
rosrun learning_tf turtle_tf_broadcaster __name:=turtle2_tf_broadcaster /turtle2
rosrun learning_tf turtle_tf_listener
rosrun turtlesim turtle_teleop_key