一、二维变换
线性变换和矩阵: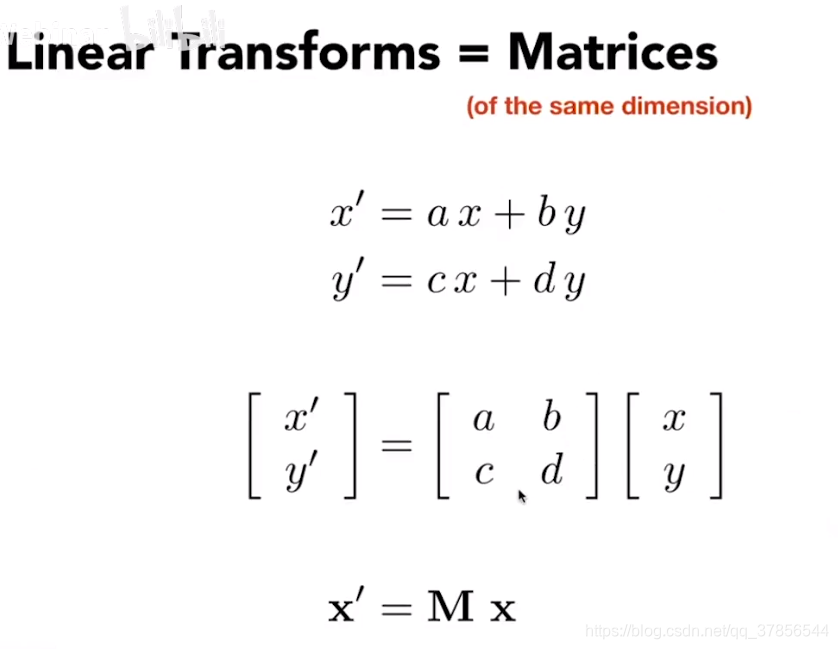
线性变换=矩阵(和向量相同维度的矩阵)
缩放: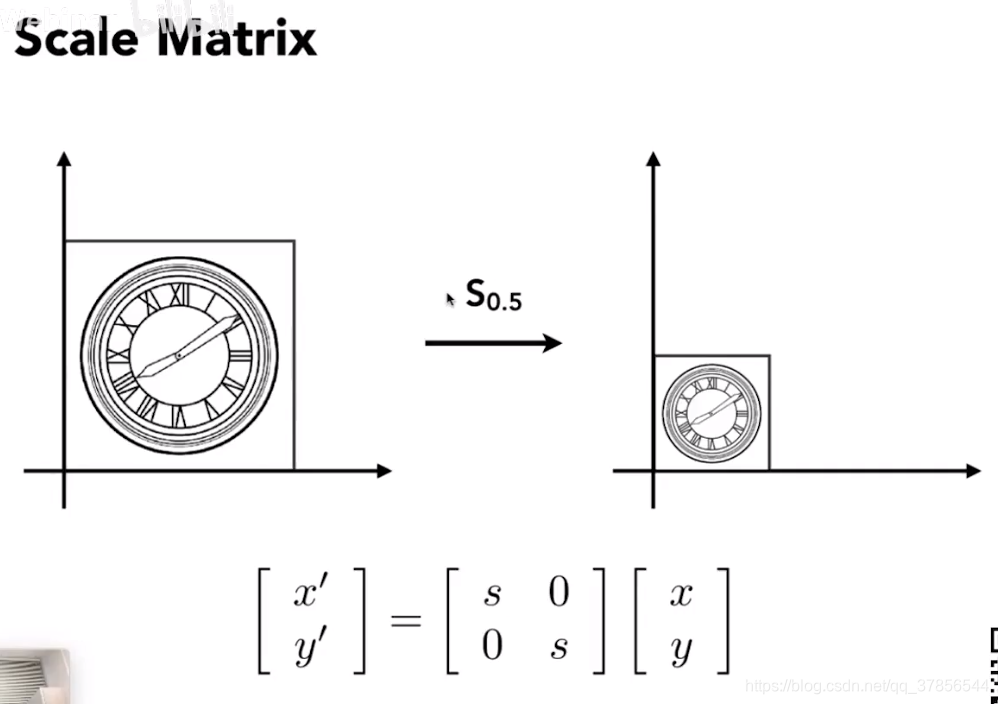 均匀缩放
均匀缩放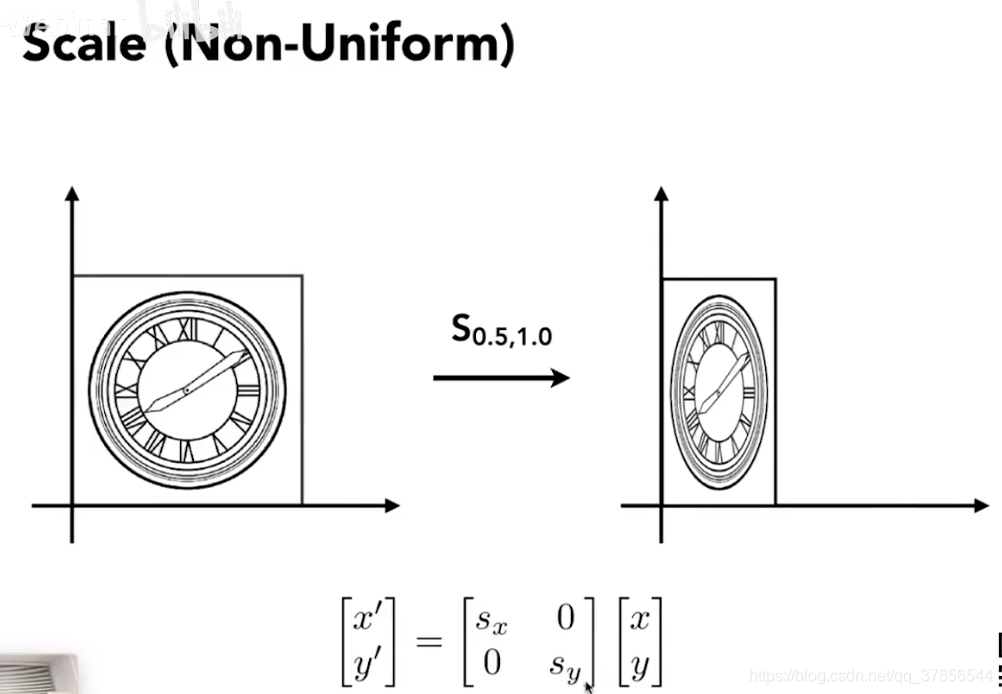 非均匀缩放
非均匀缩放
对称(Reflection):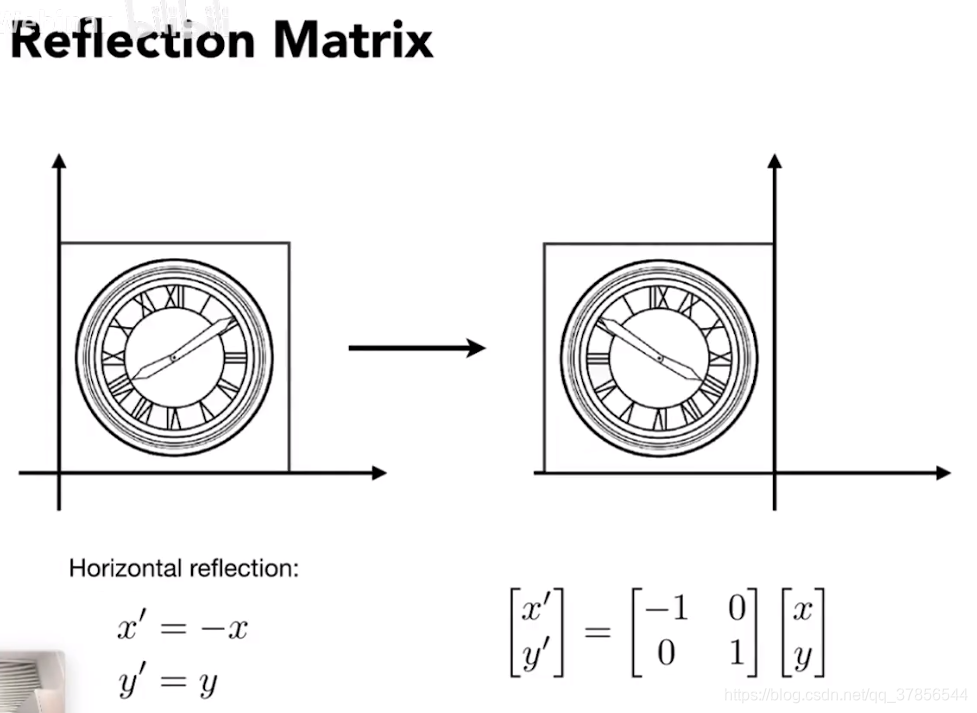 x变为-x,y没有变。
x变为-x,y没有变。
切变(Shear):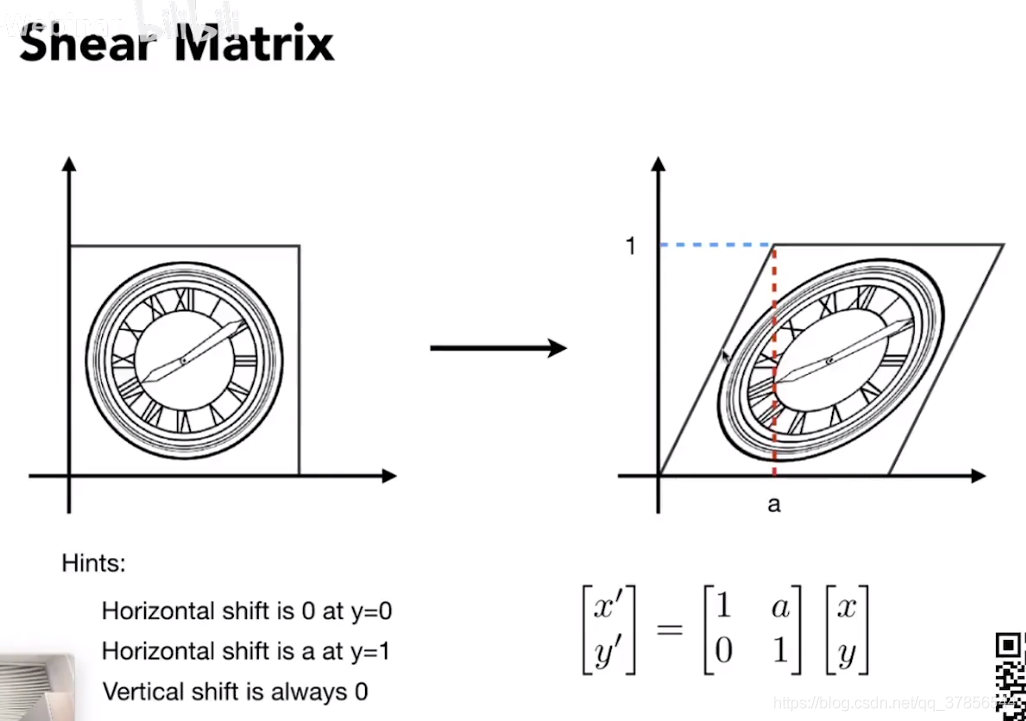 如同在水平方向上拖拽图像,水平方向上在y=0的位置没有变化,水平方向上在y=1的位置变化为a。水平方向上任意一点的移动为a*y,竖直方向上都没有变化。
如同在水平方向上拖拽图像,水平方向上在y=0的位置没有变化,水平方向上在y=1的位置变化为a。水平方向上任意一点的移动为a*y,竖直方向上都没有变化。
旋转(Rotate):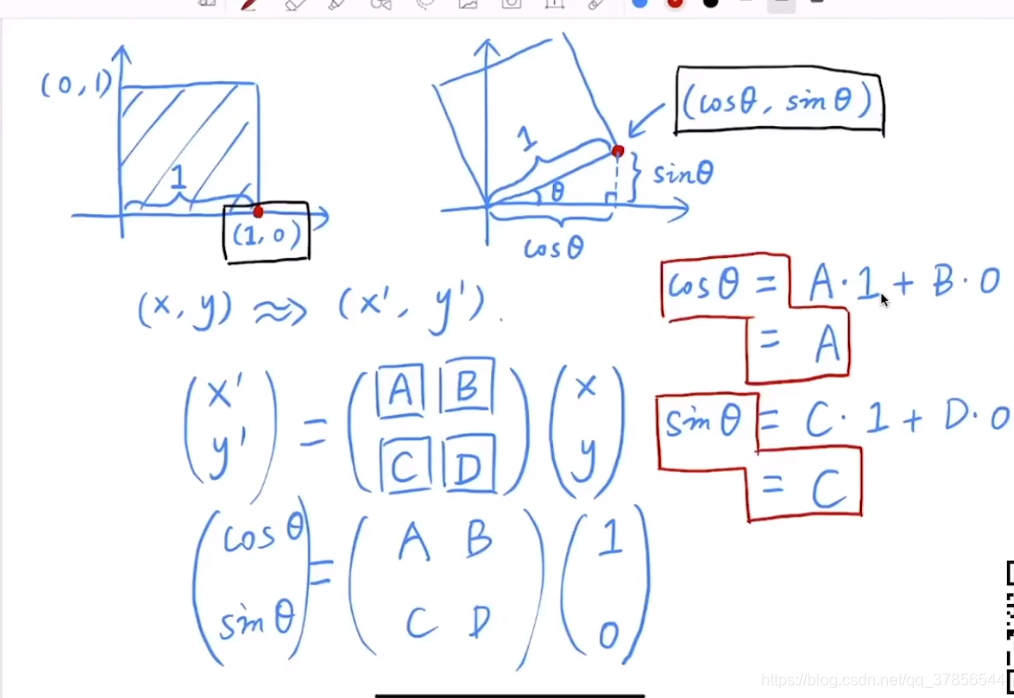
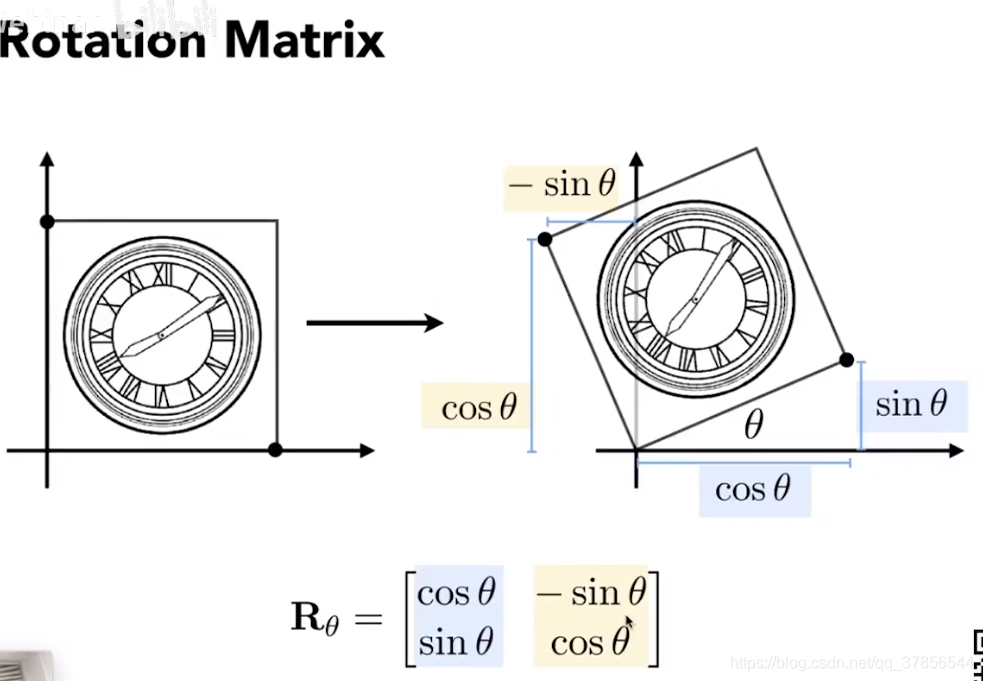 一般来说,旋转默认都是绕坐标原点旋转,逆时针方向为正方向。推导过程是通过(1,0),(0,1) 两个特殊点得到变换矩阵。
一般来说,旋转默认都是绕坐标原点旋转,逆时针方向为正方向。推导过程是通过(1,0),(0,1) 两个特殊点得到变换矩阵。
平移(Translate):
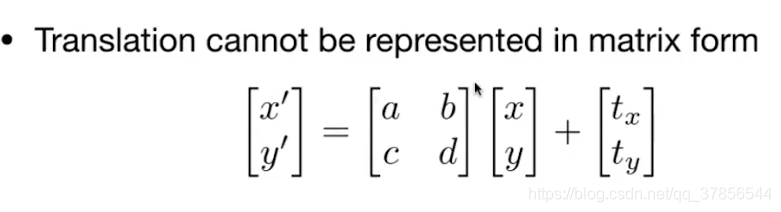 平移比较特殊,不能通过矩阵形式来表示,不属于线性变换。但是我们不希望平移变换是特殊的,所以我们引入齐次坐标来解决问题。
平移比较特殊,不能通过矩阵形式来表示,不属于线性变换。但是我们不希望平移变换是特殊的,所以我们引入齐次坐标来解决问题。
二、齐次坐标(Homogenous Coordinates)
齐次坐标(Homogenous Coordinates):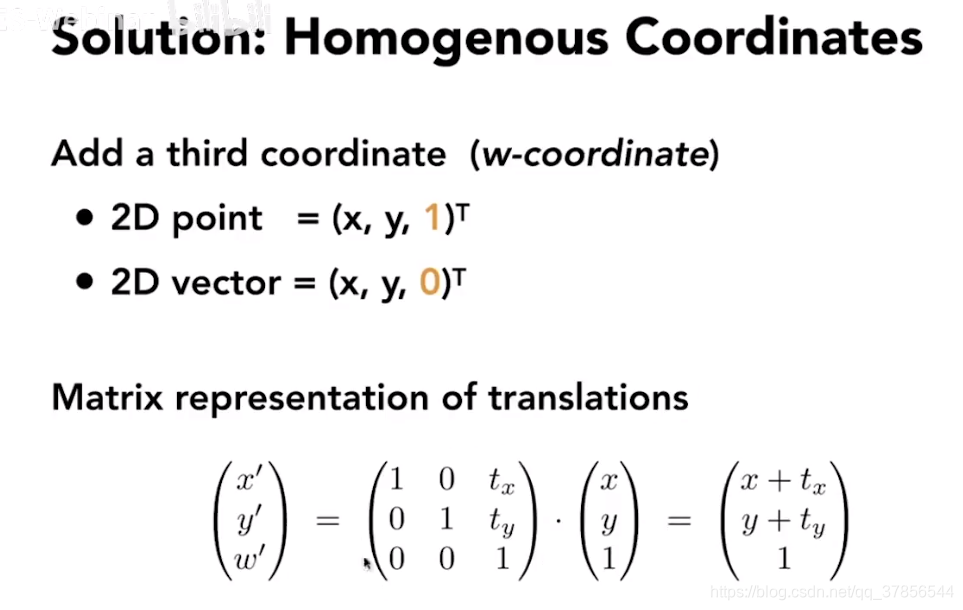
 加入第三个坐标(w坐标),接下来的矩阵就会变成以上形式。由于向量不考虑绝对位置(平移不变性),在添加第三个坐标是为0,确保变化后和变化前一致。
加入第三个坐标(w坐标),接下来的矩阵就会变成以上形式。由于向量不考虑绝对位置(平移不变性),在添加第三个坐标是为0,确保变化后和变化前一致。
仿射变换(Affine Transformations):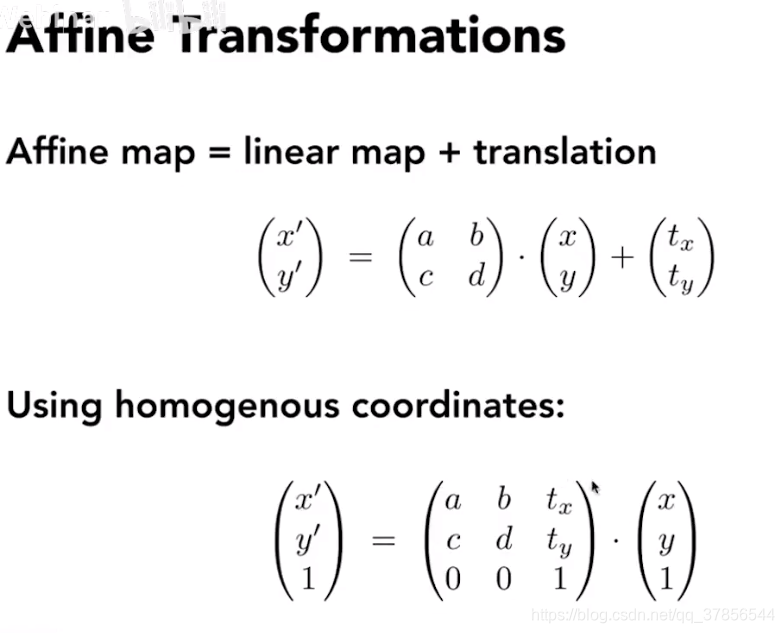 仿射映射(Affine map) = 线性映射 + 位移,所有的仿射变换都可以转换为齐次坐标形式的变换。只有在表示二维坐标下的方式变换时,最后一行才是0 0 1。
仿射映射(Affine map) = 线性映射 + 位移,所有的仿射变换都可以转换为齐次坐标形式的变换。只有在表示二维坐标下的方式变换时,最后一行才是0 0 1。
变换的统一表现形式: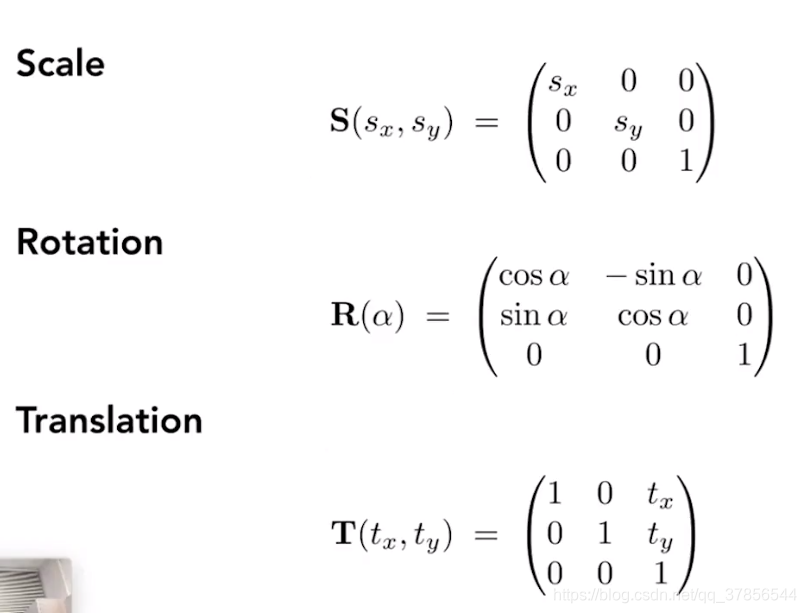 齐次坐标形式能够用来表示所有的变换。
齐次坐标形式能够用来表示所有的变换。
逆变换(Inverse Transform):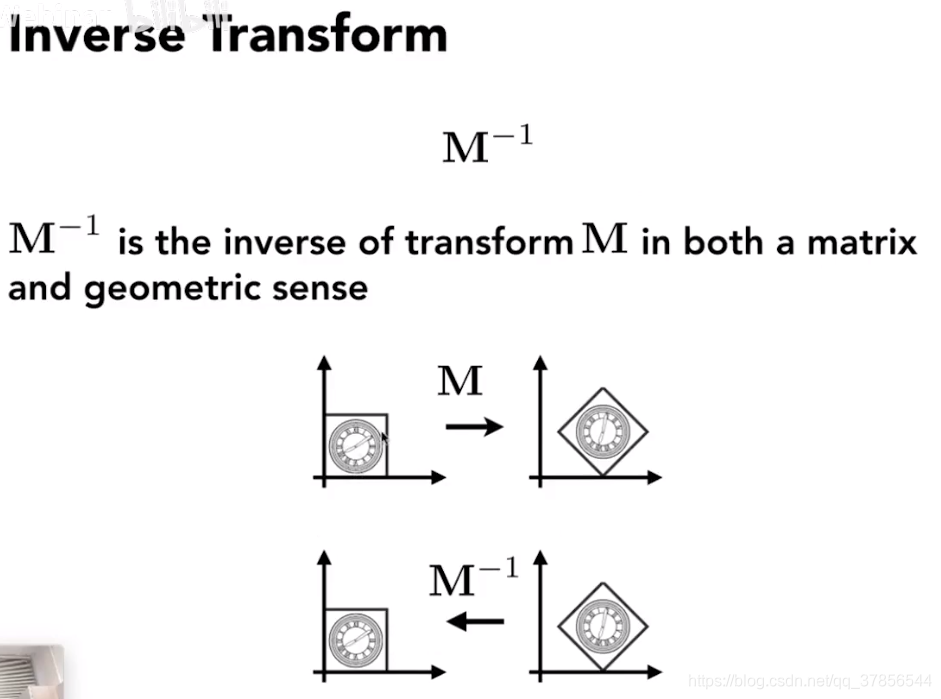 将一个变换的操作反过来就是一个逆变换,在数学上就是乘以变换矩阵的逆矩阵。
将一个变换的操作反过来就是一个逆变换,在数学上就是乘以变换矩阵的逆矩阵。
组合变换(Composite Transform):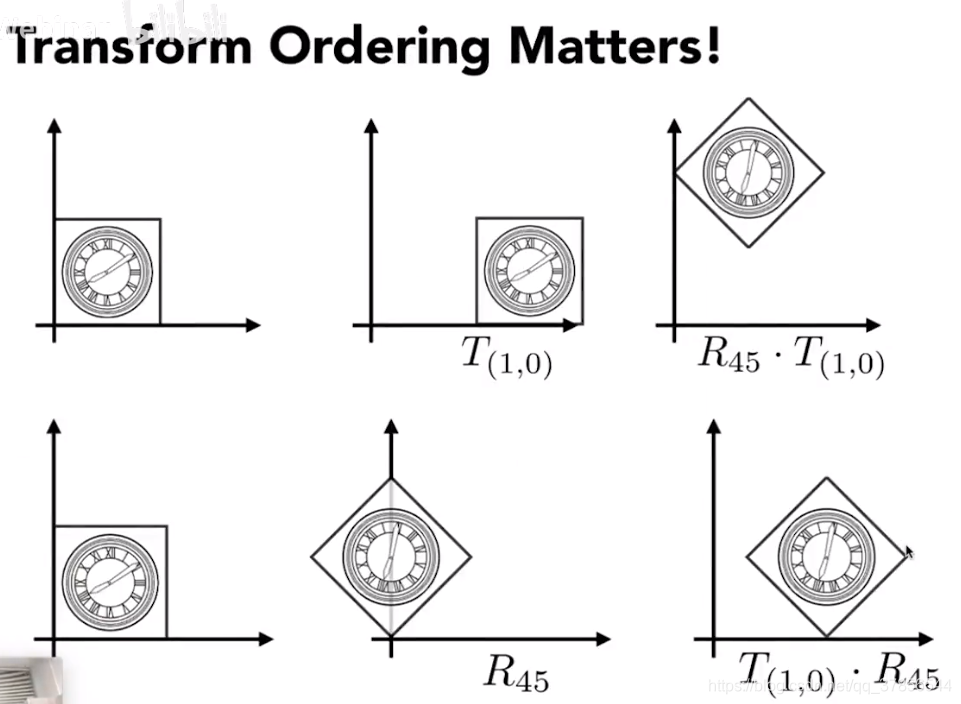 组合矩阵的变换顺序很重要,对于组合变换,变换顺序调换之后一般会得到不同的结果。也就是对于组合变换来说,不满足交换律。
组合矩阵的变换顺序很重要,对于组合变换,变换顺序调换之后一般会得到不同的结果。也就是对于组合变换来说,不满足交换律。 注意对于组合变换公式来说,计算是从右到左的。
注意对于组合变换公式来说,计算是从右到左的。
二、三维变换(3D Transforms)(预览)
三维变换(3D Transforms):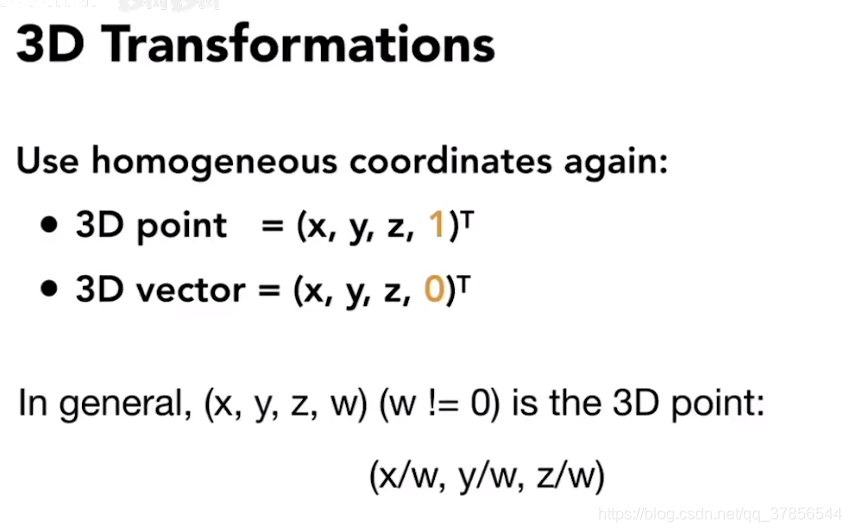 再次使用齐次坐标,用4个参数来表示三维变换。也就是说,(x, y, z, w)(w != 0)用来表示三维空间中的点(x/w, y/w, z/w)。
再次使用齐次坐标,用4个参数来表示三维变换。也就是说,(x, y, z, w)(w != 0)用来表示三维空间中的点(x/w, y/w, z/w)。
三维仿射变换: 使用4 X 4矩阵来表示三维仿射变换,最后一行是0 0 0 1,最后一列的前三个数是位移,a b c d e f g h i是三维空间中的线性变换。
使用4 X 4矩阵来表示三维仿射变换,最后一行是0 0 0 1,最后一列的前三个数是位移,a b c d e f g h i是三维空间中的线性变换。
课程的最后

先表示平移还是先表示线性变换?
应该是先线性变换再平移。