SLAM算法测评工具evo总结
evo简介
evo是一个很好的测评工具,它可以根据时间戳将轨迹进行对齐,同时可以将不同尺度的轨迹按照你指定的标准轨迹进行拉伸对齐,并可以算出均方差等评定参数,用于测评slam算法性能
github地址:https://github.com/MichaelGrupp/evo
evo安装
evo共有两种安装方式
快速安装
pip install evo --upgrade --no-binary evo
从源码安装
git clone https://github.com/MichaelGrupp/evo.git
cd evo
pip install --editable . --upgrade --no-binary evo
如果安装较慢的话,可以通过国内镜像加速
#在pip 语句后面增加指定源路径,如下
pip install --editable . --upgrade --no-binary evo -i https://pypi.tuna.tsinghua.edu.cn/simple
运行案例
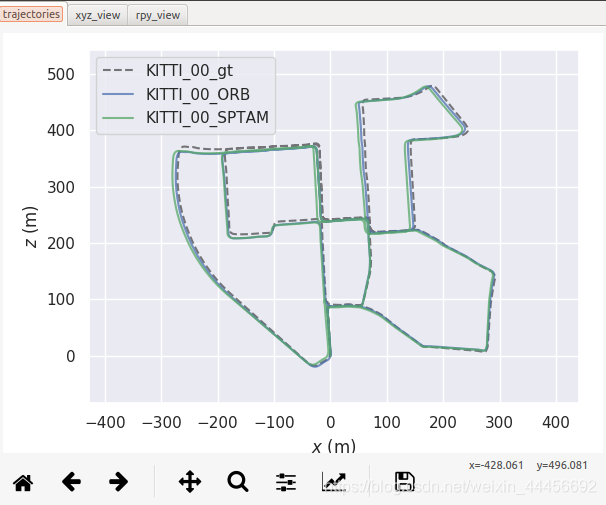
1. Plot multiple trajectories
cd test/data
evo_traj kitti KITTI_00_ORB.txt KITTI_00_SPTAM.txt --ref=KITTI_00_gt.txt -p --plot_mode=xz
我运行后报错
raise ImportError(‘dateutil 2.5.0 is the minimum required version’)
ImportError: dateutil 2.5.0 is the minimum required version ERROR] evo module evo.main_traj crashed - no logfile written (disabled)
原因是dateutil版本过低,升级版本即可
sudo pip install --upgrade python-dateutil
再次运行后,又报错
ImportError: this version of pandas is incompatible with numpy < 1.12.0
your numpy version is 1.11.0.
Please upgrade numpy to >= 1.12.0 to use this pandas version
[ERROR] evo module evo.main_traj crashed - no logfile written (disabled)
OK,numpy版本过低,安装一个高一点的numpy版本
sudo python -m pip install -U numpy==1.14.3
一番折腾后,终于出现了结果
今天就先玩儿这么多,以后再这个工具深入学习一下
参考:测评工具evo安装与使用