
我把我做的更改加了注释
gps_sim_app.cpp
#include "gps_sim_app.hpp"
#include "string_format.hpp"
#include "ui_fileman.hpp"
#include "io_file.hpp"
#include "baseband_api.hpp"
#include "portapack.hpp"
#include "portapack_persistent_memory.hpp"
using namespace portapack;
namespace ui {
void GpsSimAppView::set_ready() {
ready_signal = true;
}
//读取iq数据文件对应的txt文件
void GpsSimAppView::on_file_changed(std::filesystem::path new_file_path) {
File data_file, info_file;
char file_data[257];
// Get file size
auto data_open_error = data_file.open("/" + new_file_path.string());
if (data_open_error.is_valid()) {
file_error();
return;
}
file_path = new_file_path;
// Get original record frequency if available
std::filesystem::path info_file_path = file_path;
info_file_path.replace_extension(u".TXT");
sample_rate = 500000;
auto info_open_error = info_file.open("/" + info_file_path.string());
if (!info_open_error.is_valid()) {
memset(file_data, 0, 257);
auto read_size = info_file.read(file_data, 256);
if (!read_size.is_error()) {
auto pos1 = strstr(file_data, "center_frequency=");//读到中心频率
if (pos1) {
pos1 += 17;
field_frequency.set_value(strtoll(pos1, nullptr, 10));
} //把读取到的值保存到field_frequency变量中
auto pos2 = strstr(file_data, "sample_rate=");//读到采样率
if (pos2) {
pos2 += 12;
sample_rate = strtoll(pos2, nullptr, 10);
}//把读取到的值保存到sample_rate变量中
}
}
//这个是把采样率显示到界面上,unit_auto_scale函数我点开看了
//最后一个参数是小数点后的精确到第几位,本来是0,这样2.6MHz只能显示为2.0MHz
//我现在改为1后才能正常显示2.6MHz
text_sample_rate.set(unit_auto_scale(sample_rate, 3, 1) + "Hz");
auto file_size = data_file.size();
auto duration = (file_size * 1000) / (1 * 2 * sample_rate);
//这个duration是文件持续多久,根据文件尺寸计算,本来计算的是不对的
//因为C16比C8尺寸大一倍,现在文件尺寸小了,时间算起来会比正确的小一倍,所以要改一改分母
progressbar.set_max(file_size);
text_filename.set(file_path.filename().string().substr(0, 12));
text_duration.set(to_string_time_ms(duration));
button_play.focus();
}
void GpsSimAppView::on_tx_progress(const uint32_t progress) {
progressbar.set_value(progress);
}
void GpsSimAppView::focus() {
button_open.focus();
}
void GpsSimAppView::file_error() {
nav_.display_modal("Error", "File read error.");
}
bool GpsSimAppView::is_active() const {
return (bool)replay_thread;
}
void GpsSimAppView::toggle() {
if( is_active() ) {
stop(false);
} else {
start();
}
}
void GpsSimAppView::start() {
stop(false);
std::unique_ptr<stream::Reader> reader;
auto p = std::make_unique<FileReader>();
auto open_error = p->open(file_path);
if( open_error.is_valid() ) {
file_error();
} else {
reader = std::move(p);
}
if( reader ) {
button_play.set_bitmap(&bitmap_stop);
baseband::set_sample_rate(sample_rate * 4);
//设置基带采样率,本来是8倍过采样,500kHz变为4MHz,我这里也是过*8,用8倍过采样
//做出来的频谱跟正常的gps信号类似,但是手机收不到信号
//改为*4后,带宽缩小一倍,手机反而能收到信号,但是锁定不了
replay_thread = std::make_unique<ReplayThread>(
std::move(reader),
read_size, buffer_count,
&ready_signal,
[](uint32_t return_code) {
ReplayThreadDoneMessage message { return_code };
EventDispatcher::send_message(message);
}
);
}
radio::enable({
receiver_model.tuning_frequency(),
sample_rate * 4, //这里跟上面说的差不多,本来是*8,现在改为*4后反而可以让手机收到gps
baseband_bandwidth,
rf::Direction::Transmit,
receiver_model.rf_amp(),
static_cast<int8_t>(receiver_model.lna()),
static_cast<int8_t>(receiver_model.vga())
});
}
void GpsSimAppView::stop(const bool do_loop) {
if( is_active() )
replay_thread.reset();
if (do_loop && check_loop.value()) {
start();
} else {
radio::disable();
button_play.set_bitmap(&bitmap_play);
}
ready_signal = false;
}
void GpsSimAppView::handle_replay_thread_done(const uint32_t return_code) {
if (return_code == ReplayThread::END_OF_FILE) {
stop(true);
} else if (return_code == ReplayThread::READ_ERROR) {
stop(false);
file_error();
}
progressbar.set_value(0);
}
GpsSimAppView::GpsSimAppView(
NavigationView& nav
) : nav_ (nav)
{
baseband::run_image(portapack::spi_flash::image_tag_gps);
add_children({
&labels,
&button_open,
&text_filename,
&text_sample_rate,
&text_duration,
&progressbar,
&field_frequency,
&field_lna,
&field_rf_amp,
&check_loop,
&button_play,
&waterfall,
});
field_frequency.set_value(target_frequency());
field_frequency.set_step(receiver_model.frequency_step());
field_frequency.on_change = [this](rf::Frequency f) {
this->on_target_frequency_changed(f);
};
field_frequency.on_edit = [this, &nav]() {
// TODO: Provide separate modal method/scheme?
auto new_view = nav.push<FrequencyKeypadView>(this->target_frequency());
new_view->on_changed = [this](rf::Frequency f) {
this->on_target_frequency_changed(f);
this->field_frequency.set_value(f);
};
};
field_frequency.set_step(5000);
button_play.on_select = [this](ImageButton&) {
this->toggle();
};
button_open.on_select = [this, &nav](Button&) {
auto open_view = nav.push<FileLoadView>(".C8");
//这里本来是".C16",只会显示C16后缀的文件,现在被我改为C8了,显示C8后缀的文件
open_view->on_changed = [this](std::filesystem::path new_file_path) {
on_file_changed(new_file_path);
};
};
}
GpsSimAppView::~GpsSimAppView() {
radio::disable();
baseband::shutdown();
}
void GpsSimAppView::on_hide() {
// TODO: Terrible kludge because widget system doesn't notify Waterfall that
// it's being shown or hidden.
waterfall.on_hide();
View::on_hide();
}
void GpsSimAppView::set_parent_rect(const Rect new_parent_rect) {
View::set_parent_rect(new_parent_rect);
const ui::Rect waterfall_rect { 0, header_height, new_parent_rect.width(), new_parent_rect.height() - header_height };
waterfall.set_parent_rect(waterfall_rect);
}
void GpsSimAppView::on_target_frequency_changed(rf::Frequency f) {
set_target_frequency(f);
}
void GpsSimAppView::set_target_frequency(const rf::Frequency new_value) {
persistent_memory::set_tuned_frequency(new_value);;
}
rf::Frequency GpsSimAppView::target_frequency() const {
return persistent_memory::tuned_frequency();
}
} /* namespace ui */
gps_sim_app.hpp
#ifndef __GPS_SIM_APP_HPP__
#define __GPS_SIM_APP_HPP__
#include "ui_widget.hpp"
#include "ui_navigation.hpp"
#include "ui_receiver.hpp"
#include "replay_thread.hpp"
#include "ui_spectrum.hpp"
#include <string>
#include <memory>
namespace ui {
class GpsSimAppView : public View {
public:
GpsSimAppView(NavigationView& nav);
~GpsSimAppView();
void on_hide() override;
void set_parent_rect(const Rect new_parent_rect) override;
void focus() override;
std::string title() const override { return "GPS Simulator"; };
//这是界面上方的标题
private:
NavigationView& nav_;
static constexpr ui::Dim header_height = 3 * 16;
uint32_t sample_rate = 0;
static constexpr uint32_t baseband_bandwidth = 2000000;
//本来这里是2500000也就是2.5MHz的基带带宽,我打算发射2MHz的数据,所以改为了2000000
const size_t read_size { 16384 };
const size_t buffer_count { 3 };
void on_file_changed(std::filesystem::path new_file_path);
void on_target_frequency_changed(rf::Frequency f);
void on_tx_progress(const uint32_t progress);
void set_target_frequency(const rf::Frequency new_value);
rf::Frequency target_frequency() const;
void toggle();
void start();
void stop(const bool do_loop);
bool is_active() const;
void set_ready();
void handle_replay_thread_done(const uint32_t return_code);
void file_error();
std::filesystem::path file_path { };
std::unique_ptr<ReplayThread> replay_thread { };
bool ready_signal { false };
Labels labels {
{ { 10 * 8, 2 * 16 }, "LNA: A:", Color::light_grey() }
};
Button button_open {
{ 0 * 8, 0 * 16, 10 * 8, 2 * 16 },
"Open file"
};
Text text_filename {
{ 11 * 8, 0 * 16, 12 * 8, 16 },
"-"
};
Text text_sample_rate {
{ 24 * 8, 0 * 16, 6 * 8, 16 },
"-"
};
Text text_duration {
{ 11 * 8, 1 * 16, 6 * 8, 16 },
"-"
};
ProgressBar progressbar {
{ 18 * 8, 1 * 16, 12 * 8, 16 }
};
FrequencyField field_frequency {
{ 0 * 8, 2 * 16 },
};
LNAGainField field_lna {
{ 14 * 8, 2 * 16 }
};
RFAmpField field_rf_amp {
{ 19 * 8, 2 * 16 }
};
Checkbox check_loop {
{ 21 * 8, 2 * 16 },
4,
"Loop",
true
};
ImageButton button_play {
{ 28 * 8, 2 * 16, 2 * 8, 1 * 16 },
&bitmap_play,
Color::green(),
Color::black()
};
spectrum::WaterfallWidget waterfall { };
MessageHandlerRegistration message_handler_replay_thread_error {
Message::ID::ReplayThreadDone,
[this](const Message* const p) {
const auto message = *reinterpret_cast<const ReplayThreadDoneMessage*>(p);
this->handle_replay_thread_done(message.return_code);
}
};
MessageHandlerRegistration message_handler_fifo_signal {
Message::ID::RequestSignal,
[this](const Message* const p) {
const auto message = static_cast<const RequestSignalMessage*>(p);
if (message->signal == RequestSignalMessage::Signal::FillRequest) {
this->set_ready();
}
}
};
MessageHandlerRegistration message_handler_tx_progress {
Message::ID::TXProgress,
[this](const Message* const p) {
const auto message = *reinterpret_cast<const TXProgressMessage*>(p);
this->on_tx_progress(message.progress);
}
};
};
} /* namespace ui */
#endif/*__GPS_SIM_APP_HPP__*/
proc_gps_sim.app
#include "proc_gps_sim.hpp"
#include "sine_table_int8.hpp"
#include "portapack_shared_memory.hpp"
#include "event_m4.hpp"
#include "utility.hpp"
ReplayProcessor::ReplayProcessor() {
channel_filter_pass_f = taps_200k_decim_1.pass_frequency_normalized * 1000000; // 162760.416666667
channel_filter_stop_f = taps_200k_decim_1.stop_frequency_normalized * 1000000; // 337239.583333333
spectrum_samples = 0;
channel_spectrum.set_decimation_factor(1);
configured = false;
}
void ReplayProcessor::execute(const buffer_c8_t& buffer) {
/* 4MHz, 2048 samples */
if (!configured) return;
// File data is in C16 format, we need C8
// File samplerate is 500kHz, we're at 4MHz
// iq_buffer can only be 512 C16 samples (RAM limitation)
// To fill up the 2048-sample C8 buffer, we need:
// 2048 samples * 2 bytes per sample = 4096 bytes
// Since we're oversampling by 4M/500k = 8, we only need 2048/8 = 256 samples from the file and duplicate them 8 times each
// So 256 * 4 bytes per sample (C16) = 1024 bytes from the file
//这段英文注释是本来replay里的,不符合我们这里的情况了
//replay里,读取的文件是C16格式,发送的是C8格式,另外采样率要从500kHz增加到4MHz
//iq_buffer由于内存限制512个C16采样点不会变
//2048个C8采样点,一个采样点包含一个int8实部一个int8虚部,这样一个采样点就是2个byte
//2048个采样点就是4096 byte
//本来在replay里要从500kHz变为4MHz要做8倍过采样
//那么要实现2048个采样点实际从文件里只需要1/8的点就行,也就是256个采样点
//然后每个点重复8次就行,我本来也打算8倍过采样,只不过gps_sim_app.cpp里必须改为*4才有效果
//所以下面还是按照8倍过采样来做
if( stream ) {
//sizeof(*buffer.p) = sizeof(C8) = 2*int8 = 2 bytes
//buffer是这个函数的输入参数,已经声明为C8类型了
//buffer.count = 2048
//这个2048是要给缓存生成的采样点长度
const size_t bytes_to_read = sizeof(*buffer.p) * 1 * (buffer.count / 8);
// 本来是*2 (C16),现在C8所以*1, /8 是过采样导致的,实际只需要读取文件里的1/8
bytes_read += stream->read(iq_buffer.p, bytes_to_read);
}
// Fill and "stretch"
for (size_t i = 0; i < buffer.count; i++) {
//注释里的是本来用的代码
//下面是我自己写的 应该效果一样
/*if (i & 3) {
//这里i&3是按位与 i与11做与操作如果i是000 100,也就是4的整数倍?
//就不会进入这里,首先i长度我不知道,而且为啥是4的整数倍?不是8?
//如果一旦进入这里,说明i不是8的整数倍,那么buffer.p的取值与前一个取之相同
//也就是在做过采样的插值操作,中间的点全部重复之前的点
buffer.p[i] = buffer.p[i - 1];
} else {
//如果i是8的整数倍,要取出一个新的点获得新的数据
//i>>3,相当于i/8,然后从iq_buffer.p里获得新的数据存入buffer.p就行
auto re_out = iq_buffer.p[i >> 3].real() ;
auto im_out = iq_buffer.p[i >> 3].imag() ;
buffer.p[i] = { (int8_t)re_out, (int8_t)im_out };
}*/
//为了更直观,我把按位操作全部替换为我习惯的方式了
//另外我也根据我理解的过采样,与8的整数倍比较而不是4了
if (i % 8 != 0) {
buffer.p[i] = buffer.p[i - 1];
} else {
auto re_out = iq_buffer.p[i/8].real() ;
auto im_out = iq_buffer.p[i/8].imag() ;
buffer.p[i] = { (int8_t)re_out, (int8_t)im_out };
}
}
spectrum_samples += buffer.count;
if( spectrum_samples >= spectrum_interval_samples ) {
spectrum_samples -= spectrum_interval_samples;
//channel_spectrum.feed(iq_buffer, channel_filter_pass_f, channel_filter_stop_f);
txprogress_message.progress = bytes_read; // Inform UI about progress
txprogress_message.done = false;
shared_memory.application_queue.push(txprogress_message);
}
}
void ReplayProcessor::on_message(const Message* const message) {
switch(message->id) {
case Message::ID::UpdateSpectrum:
case Message::ID::SpectrumStreamingConfig:
channel_spectrum.on_message(message);
break;
case Message::ID::SamplerateConfig:
samplerate_config(*reinterpret_cast<const SamplerateConfigMessage*>(message));
break;
case Message::ID::ReplayConfig:
configured = false;
bytes_read = 0;
replay_config(*reinterpret_cast<const ReplayConfigMessage*>(message));
break;
// App has prefilled the buffers, we're ready to go now
case Message::ID::FIFOData:
configured = true;
break;
default:
break;
}
}
void ReplayProcessor::samplerate_config(const SamplerateConfigMessage& message) {
baseband_fs = message.sample_rate;
baseband_thread.set_sampling_rate(baseband_fs);
spectrum_interval_samples = baseband_fs / spectrum_rate_hz;
}
void ReplayProcessor::replay_config(const ReplayConfigMessage& message) {
if( message.config ) {
stream = std::make_unique<StreamOutput>(message.config);
// Tell application that the buffers and FIFO pointers are ready, prefill
shared_memory.application_queue.push(sig_message);
} else {
stream.reset();
}
}
int main() {
EventDispatcher event_dispatcher { std::make_unique<ReplayProcessor>() };
event_dispatcher.run();
return 0;
}
proc_sim_app.hpp
#ifndef __PROC_GPS_SIM_HPP__
#define __PROC_GPS_SIM_HPP__
#include "baseband_processor.hpp"
#include "baseband_thread.hpp"
#include "spectrum_collector.hpp"
#include "stream_output.hpp"
#include <array>
#include <memory>
class ReplayProcessor : public BasebandProcessor {
public:
ReplayProcessor();
void execute(const buffer_c8_t& buffer) override;
void on_message(const Message* const message) override;
private:
size_t baseband_fs = 0;
static constexpr auto spectrum_rate_hz = 50.0f;
BasebandThread baseband_thread { baseband_fs, this, NORMALPRIO + 20, baseband::Direction::Transmit };
std::array<complex8_t, 256> iq { };
//上面的类型complex8_t和下面buffer_c8_t是我改的
//如果不这么改,我用频谱仪观察发射的波形,完全不是GPS正常的圆拱形了
//所以这里改的肯定没错
const buffer_c8_t iq_buffer {
iq.data(),
iq.size(),
baseband_fs /4 这里/4还是/8貌似没什么区别
};
uint32_t channel_filter_pass_f = 0;
uint32_t channel_filter_stop_f = 0;
std::unique_ptr<StreamOutput> stream { };
SpectrumCollector channel_spectrum { };
size_t spectrum_interval_samples = 0;
size_t spectrum_samples = 0;
bool configured { false };
uint32_t bytes_read { 0 };
void samplerate_config(const SamplerateConfigMessage& message);
void replay_config(const ReplayConfigMessage& message);
TXProgressMessage txprogress_message { };
RequestSignalMessage sig_message { RequestSignalMessage::Signal::FillRequest };
};
#endif/*__PROC_GPS_SIM_HPP__*/
稍后我会上传正常的GPS波形,以及手机搜星强度,以及我自己的程序生成的波形和手机搜星强度。
我用下面的命令生成了GPS数据文件,我采样率没有用2.6MHz的,而是使用2MHz,这样后面凑过采样比较方便,而且我发现这样也是能定位的
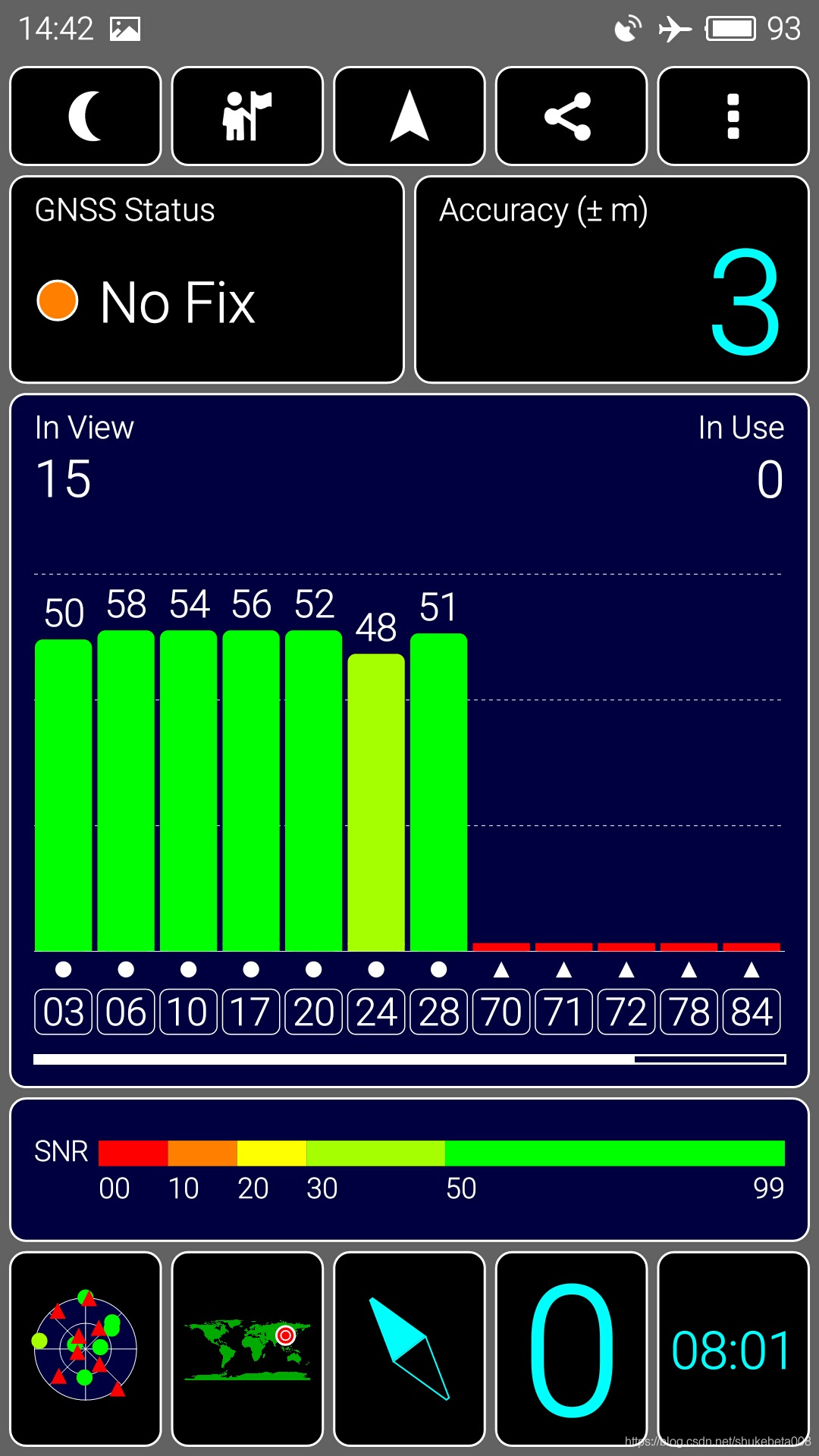
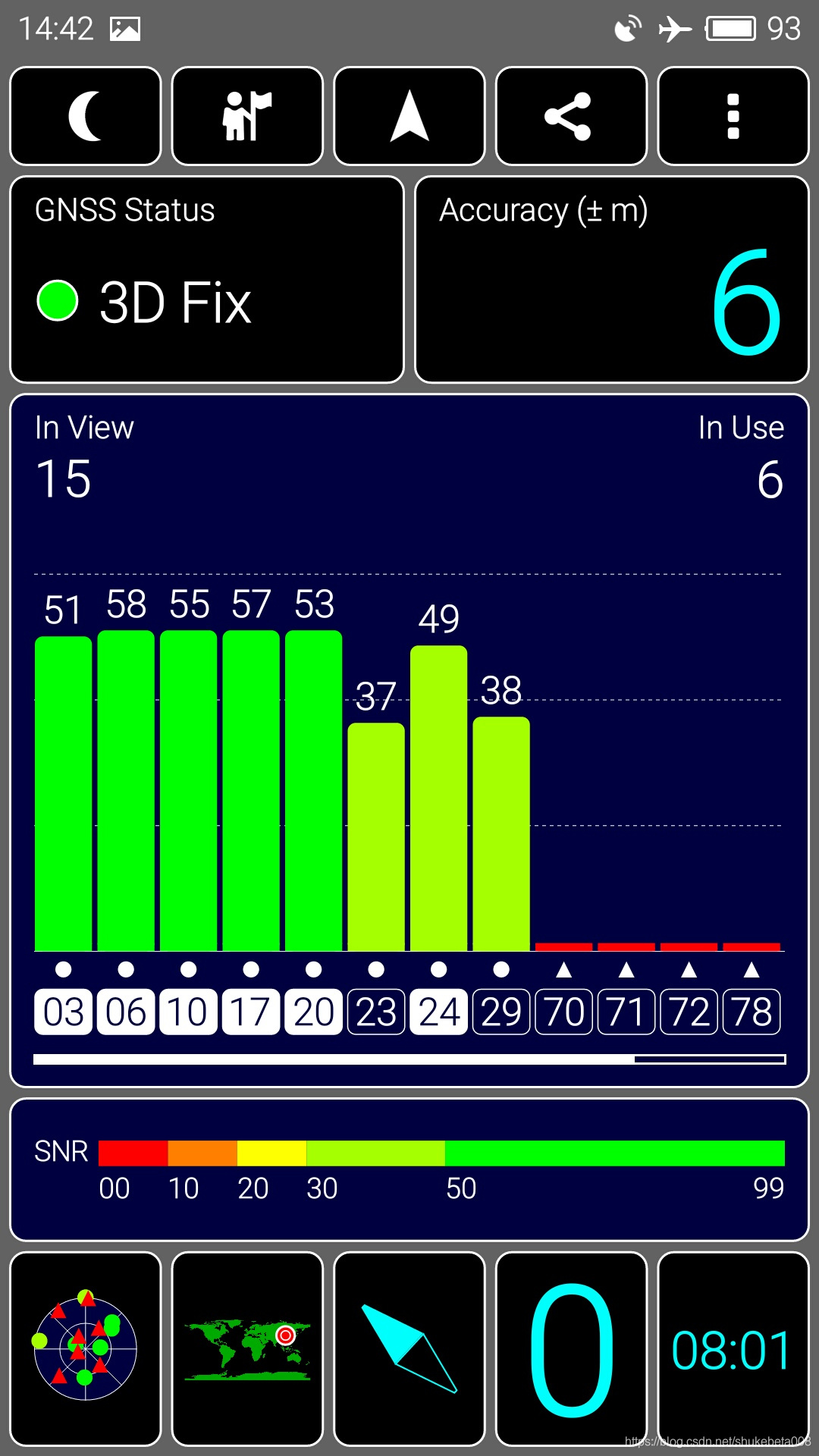
./gps-sdr-sim -e brdc3540.14n -l 40,110,100 -b 8 -s 20000001.用GridRF版本的portapack来发射GPS信号
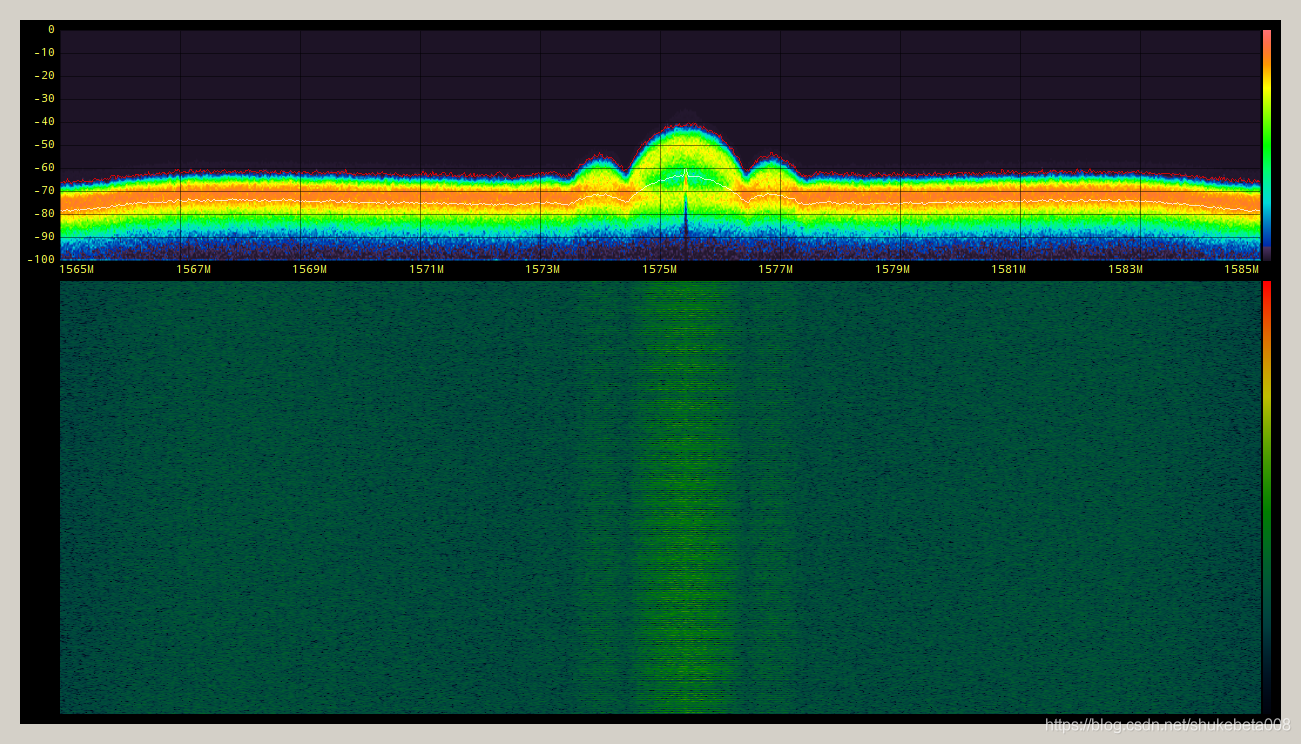
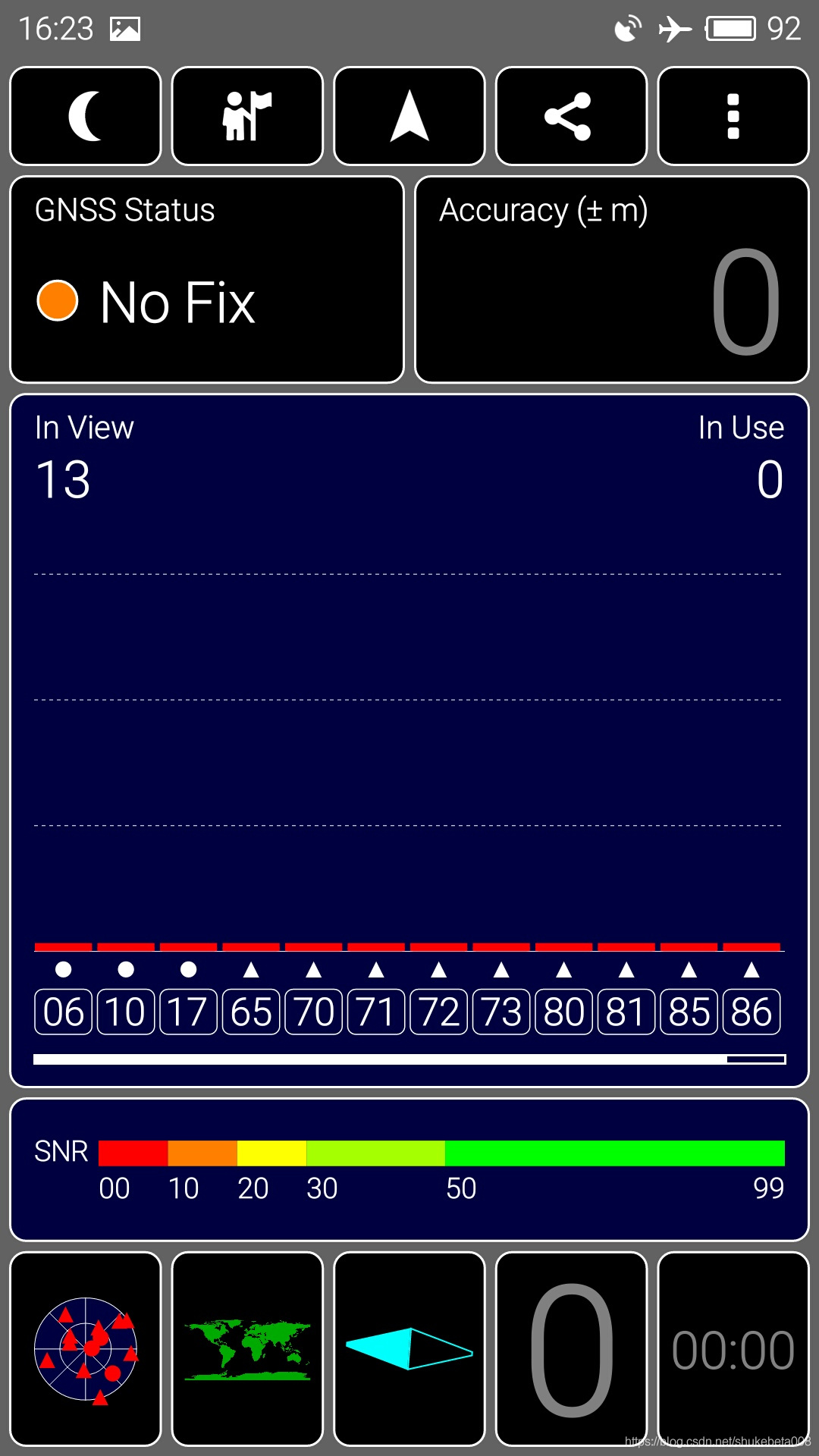
这种方式定位最快速,而且很稳定,锁定后不会丢信号,而且定位精度也很高
可以看到信号强度基本都在50以上。

2.hackrf_transfer
这是我没有用portapack,而是直接用电脑来发射前面生成的数据文件。我在这里提高了发射增益到30,否则频谱上看不到波形。
这种模式搜星要等待一段时间,而且有时候锁定后稍微动一下就会失去锁定。
hackrf_transfer -t gpssim.bin -f 1575420000 -s 2000000 -a 1 -x 30
有时候能锁定,有时候不行。
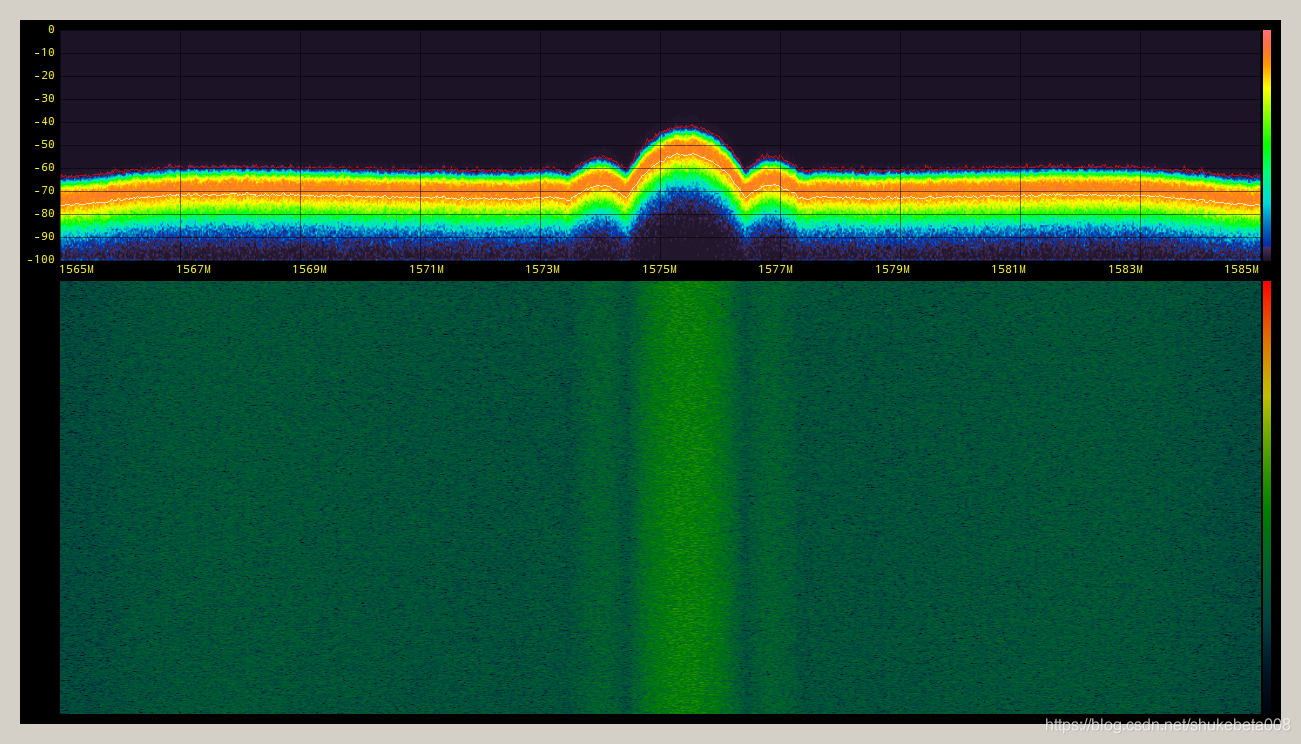
3. 4 oversample
这是我自己改的固件,过采样率的几个变量我设置为*4,有个地方是/4,就跟我贴的代码里那样。
界面上的设置是:LNA 32 A 0
这种情况下频谱图变了。

但是手机还是能收到信号,只是不能定位,而且信号强度明显降低了,只有30左右,但是我手机与portpack的距离没变化。

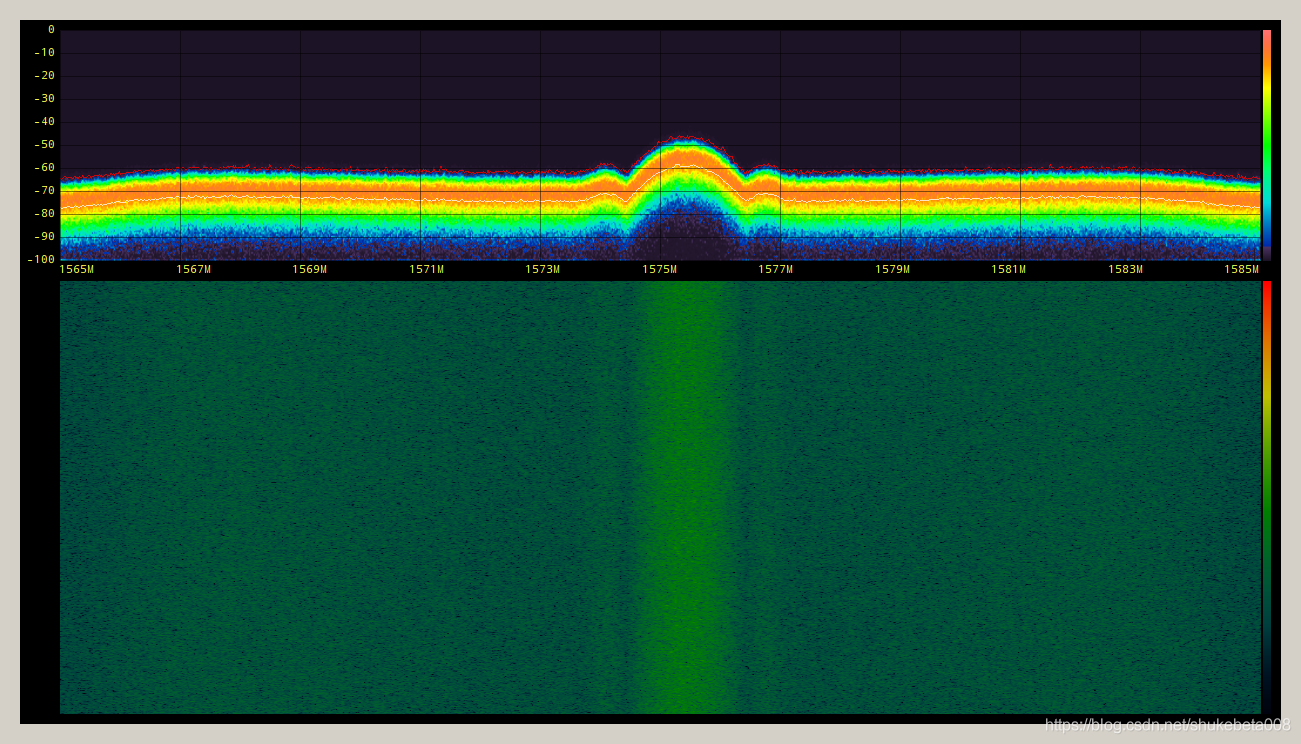
4. 8 oversample
这也是我自己的固件,我把所有*4和/4都改为了*8和/8。也就是说这是完全符合我理解的理论来写的代码
界面设置:LNA 32 A 0
这时候,频谱形状和gridrf是比较像的,只是瀑布图上看得到信号有些断断续续。
这时候手机是完全看不到卫星的。
总结:
2效果不如1好可能是实时性的问题。忽略掉2不看。
1和3虽然带宽不同,但是3的频谱其实是连续的,这一点和1一样,4虽然带宽和1一样宽,但是瀑布图看得出是有中断的,可能是这个中断导致的问题,我没把缓存用满。
后来我就在想办法怎么把缓存用满,proc_gps_sim.cpp里的bytes_to_read尽量改大些,我干脆把/8去掉了,这样一来,proc_gps_sim.hpp里的iq声明的时候长度声明为2048,否则会出错。然后我在gps_sim_app.cpp的start函数里把过采样*8给去掉了,生成多少我就发多少。gps_sim_app.hpp里的baseband_bandwidth设置为3000000,这个基本上是基带滤波器,比要发射的信号宽一点就行,我发的gps信号在2MHz~2.6MHz,所以3MHz够了。另外,proc_gps_sim.cpp的execute函数的"Fill and "stretch"里实际上我取出来多少就赋值多少,实际没做过采样了。
附上我最新改的代码:
gps_sim_app.cpp
#include "gps_sim_app.hpp"
#include "string_format.hpp"
#include "ui_fileman.hpp"
#include "io_file.hpp"
#include "baseband_api.hpp"
#include "portapack.hpp"
#include "portapack_persistent_memory.hpp"
using namespace portapack;
namespace ui {
void GpsSimAppView::set_ready() {
ready_signal = true;
}
void GpsSimAppView::on_file_changed(std::filesystem::path new_file_path) {
File data_file, info_file;
char file_data[257];
// Get file size
auto data_open_error = data_file.open("/" + new_file_path.string());
if (data_open_error.is_valid()) {
file_error();
return;
}
file_path = new_file_path;
// Get original record frequency if available
std::filesystem::path info_file_path = file_path;
info_file_path.replace_extension(u".TXT");
sample_rate = 500000;
auto info_open_error = info_file.open("/" + info_file_path.string());
if (!info_open_error.is_valid()) {
memset(file_data, 0, 257);
auto read_size = info_file.read(file_data, 256);
if (!read_size.is_error()) {
auto pos1 = strstr(file_data, "center_frequency=");
if (pos1) {
pos1 += 17;
field_frequency.set_value(strtoll(pos1, nullptr, 10));
}
auto pos2 = strstr(file_data, "sample_rate=");
if (pos2) {
pos2 += 12;
sample_rate = strtoll(pos2, nullptr, 10);
}
}
}
text_sample_rate.set(unit_auto_scale(sample_rate, 3, 1) + "Hz");
auto file_size = data_file.size();
auto duration = (file_size * 1000) / (1 * 2 * sample_rate);
progressbar.set_max(file_size);
text_filename.set(file_path.filename().string().substr(0, 12));
text_duration.set(to_string_time_ms(duration));
button_play.focus();
}
void GpsSimAppView::on_tx_progress(const uint32_t progress) {
progressbar.set_value(progress);
}
void GpsSimAppView::focus() {
button_open.focus();
}
void GpsSimAppView::file_error() {
nav_.display_modal("Error", "File read error.");
}
bool GpsSimAppView::is_active() const {
return (bool)replay_thread;
}
void GpsSimAppView::toggle() {
if( is_active() ) {
stop(false);
} else {
start();
}
}
void GpsSimAppView::start() {
stop(false);
std::unique_ptr<stream::Reader> reader;
auto p = std::make_unique<FileReader>();
auto open_error = p->open(file_path);
if( open_error.is_valid() ) {
file_error();
} else {
reader = std::move(p);
}
if( reader ) {
button_play.set_bitmap(&bitmap_stop);
baseband::set_sample_rate(sample_rate );
replay_thread = std::make_unique<ReplayThread>(
std::move(reader),
read_size, buffer_count,
&ready_signal,
[](uint32_t return_code) {
ReplayThreadDoneMessage message { return_code };
EventDispatcher::send_message(message);
}
);
}
radio::enable({
receiver_model.tuning_frequency(),
sample_rate ,
baseband_bandwidth,
rf::Direction::Transmit,
receiver_model.rf_amp(),
static_cast<int8_t>(receiver_model.lna()),
static_cast<int8_t>(receiver_model.vga())
});
}
void GpsSimAppView::stop(const bool do_loop) {
if( is_active() )
replay_thread.reset();
if (do_loop && check_loop.value()) {
start();
} else {
radio::disable();
button_play.set_bitmap(&bitmap_play);
}
ready_signal = false;
}
void GpsSimAppView::handle_replay_thread_done(const uint32_t return_code) {
if (return_code == ReplayThread::END_OF_FILE) {
stop(true);
} else if (return_code == ReplayThread::READ_ERROR) {
stop(false);
file_error();
}
progressbar.set_value(0);
}
GpsSimAppView::GpsSimAppView(
NavigationView& nav
) : nav_ (nav)
{
baseband::run_image(portapack::spi_flash::image_tag_gps);
add_children({
&labels,
&button_open,
&text_filename,
&text_sample_rate,
&text_duration,
&progressbar,
&field_frequency,
&field_lna,
&field_rf_amp,
&check_loop,
&button_play,
&waterfall,
});
field_frequency.set_value(target_frequency());
field_frequency.set_step(receiver_model.frequency_step());
field_frequency.on_change = [this](rf::Frequency f) {
this->on_target_frequency_changed(f);
};
field_frequency.on_edit = [this, &nav]() {
// TODO: Provide separate modal method/scheme?
auto new_view = nav.push<FrequencyKeypadView>(this->target_frequency());
new_view->on_changed = [this](rf::Frequency f) {
this->on_target_frequency_changed(f);
this->field_frequency.set_value(f);
};
};
field_frequency.set_step(5000);
button_play.on_select = [this](ImageButton&) {
this->toggle();
};
button_open.on_select = [this, &nav](Button&) {
auto open_view = nav.push<FileLoadView>(".C8");
open_view->on_changed = [this](std::filesystem::path new_file_path) {
on_file_changed(new_file_path);
};
};
}
GpsSimAppView::~GpsSimAppView() {
radio::disable();
baseband::shutdown();
}
void GpsSimAppView::on_hide() {
// TODO: Terrible kludge because widget system doesn't notify Waterfall that
// it's being shown or hidden.
waterfall.on_hide();
View::on_hide();
}
void GpsSimAppView::set_parent_rect(const Rect new_parent_rect) {
View::set_parent_rect(new_parent_rect);
const ui::Rect waterfall_rect { 0, header_height, new_parent_rect.width(), new_parent_rect.height() - header_height };
waterfall.set_parent_rect(waterfall_rect);
}
void GpsSimAppView::on_target_frequency_changed(rf::Frequency f) {
set_target_frequency(f);
}
void GpsSimAppView::set_target_frequency(const rf::Frequency new_value) {
persistent_memory::set_tuned_frequency(new_value);;
}
rf::Frequency GpsSimAppView::target_frequency() const {
return persistent_memory::tuned_frequency();
}
} /* namespace ui */gps_sim_app.hpp
#ifndef __GPS_SIM_APP_HPP__
#define __GPS_SIM_APP_HPP__
#include "ui_widget.hpp"
#include "ui_navigation.hpp"
#include "ui_receiver.hpp"
#include "replay_thread.hpp"
#include "ui_spectrum.hpp"
#include <string>
#include <memory>
namespace ui {
class GpsSimAppView : public View {
public:
GpsSimAppView(NavigationView& nav);
~GpsSimAppView();
void on_hide() override;
void set_parent_rect(const Rect new_parent_rect) override;
void focus() override;
std::string title() const override { return "GPS Simulator"; };
private:
NavigationView& nav_;
static constexpr ui::Dim header_height = 3 * 16;
uint32_t sample_rate = 0;
static constexpr uint32_t baseband_bandwidth = 3000000; //filter bandwidth
const size_t read_size { 16384 };
const size_t buffer_count { 3 };
void on_file_changed(std::filesystem::path new_file_path);
void on_target_frequency_changed(rf::Frequency f);
void on_tx_progress(const uint32_t progress);
void set_target_frequency(const rf::Frequency new_value);
rf::Frequency target_frequency() const;
void toggle();
void start();
void stop(const bool do_loop);
bool is_active() const;
void set_ready();
void handle_replay_thread_done(const uint32_t return_code);
void file_error();
std::filesystem::path file_path { };
std::unique_ptr<ReplayThread> replay_thread { };
bool ready_signal { false };
Labels labels {
{ { 10 * 8, 2 * 16 }, "LNA: A:", Color::light_grey() }
};
Button button_open {
{ 0 * 8, 0 * 16, 10 * 8, 2 * 16 },
"Open file"
};
Text text_filename {
{ 11 * 8, 0 * 16, 12 * 8, 16 },
"-"
};
Text text_sample_rate {
{ 24 * 8, 0 * 16, 6 * 8, 16 },
"-"
};
Text text_duration {
{ 11 * 8, 1 * 16, 6 * 8, 16 },
"-"
};
ProgressBar progressbar {
{ 18 * 8, 1 * 16, 12 * 8, 16 }
};
FrequencyField field_frequency {
{ 0 * 8, 2 * 16 },
};
LNAGainField field_lna {
{ 14 * 8, 2 * 16 }
};
RFAmpField field_rf_amp {
{ 19 * 8, 2 * 16 }
};
Checkbox check_loop {
{ 21 * 8, 2 * 16 },
4,
"Loop",
true
};
ImageButton button_play {
{ 28 * 8, 2 * 16, 2 * 8, 1 * 16 },
&bitmap_play,
Color::green(),
Color::black()
};
spectrum::WaterfallWidget waterfall { };
MessageHandlerRegistration message_handler_replay_thread_error {
Message::ID::ReplayThreadDone,
[this](const Message* const p) {
const auto message = *reinterpret_cast<const ReplayThreadDoneMessage*>(p);
this->handle_replay_thread_done(message.return_code);
}
};
MessageHandlerRegistration message_handler_fifo_signal {
Message::ID::RequestSignal,
[this](const Message* const p) {
const auto message = static_cast<const RequestSignalMessage*>(p);
if (message->signal == RequestSignalMessage::Signal::FillRequest) {
this->set_ready();
}
}
};
MessageHandlerRegistration message_handler_tx_progress {
Message::ID::TXProgress,
[this](const Message* const p) {
const auto message = *reinterpret_cast<const TXProgressMessage*>(p);
this->on_tx_progress(message.progress);
}
};
};
} /* namespace ui */
#endif/*__GPS_SIM_APP_HPP__*/proc_gps_sim.cpp
#include "proc_gps_sim.hpp"
#include "sine_table_int8.hpp"
#include "portapack_shared_memory.hpp"
#include "event_m4.hpp"
#include "utility.hpp"
ReplayProcessor::ReplayProcessor() {
channel_filter_pass_f = taps_200k_decim_1.pass_frequency_normalized * 1000000; // 162760.416666667
channel_filter_stop_f = taps_200k_decim_1.stop_frequency_normalized * 1000000; // 337239.583333333
spectrum_samples = 0;
channel_spectrum.set_decimation_factor(1);
configured = false;
}
void ReplayProcessor::execute(const buffer_c8_t& buffer) {
/* 4MHz, 2048 samples */
if (!configured) return;
// File data is in C16 format, we need C8
// File samplerate is 500kHz, we're at 4MHz
// iq_buffer can only be 512 C16 samples (RAM limitation)
// To fill up the 2048-sample C8 buffer, we need:
// 2048 samples * 2 bytes per sample = 4096 bytes
// Since we're oversampling by 4M/500k = 8, we only need 2048/8 = 256 samples from the file and duplicate them 8 times each
// So 256 * 4 bytes per sample (C16) = 1024 bytes from the file
if( stream ) { //sizeof(*buffer.p) = sizeof(C8) = 2*int8 = 2 bytes //buffer.count = 2048
const size_t bytes_to_read = sizeof(*buffer.p) * 1 * (buffer.count ); // *2 (C16), /8 (oversampling) should be == 1024
bytes_read += stream->read(iq_buffer.p, bytes_to_read);
}
// Fill and "stretch"
for (size_t i = 0; i < buffer.count; i++) {
/*if (i & 3) {
buffer.p[i] = buffer.p[i - 1];
} else {
auto re_out = iq_buffer.p[i >> 3].real() ;
auto im_out = iq_buffer.p[i >> 3].imag() ;
buffer.p[i] = { (int8_t)re_out, (int8_t)im_out };
}*/
/*
if (i % 8 != 0) {
buffer.p[i] = buffer.p[i - 1];
} else {
auto re_out = iq_buffer.p[i/8].real() ;
auto im_out = iq_buffer.p[i/8].imag() ;
buffer.p[i] = { (int8_t)re_out, (int8_t)im_out };
}*/
auto re_out = iq_buffer.p[i].real() ;
auto im_out = iq_buffer.p[i].imag() ;
buffer.p[i] = { (int8_t)re_out, (int8_t)im_out };
}
spectrum_samples += buffer.count;
if( spectrum_samples >= spectrum_interval_samples ) {
spectrum_samples -= spectrum_interval_samples;
//channel_spectrum.feed(iq_buffer, channel_filter_pass_f, channel_filter_stop_f);
txprogress_message.progress = bytes_read; // Inform UI about progress
txprogress_message.done = false;
shared_memory.application_queue.push(txprogress_message);
}
}
void ReplayProcessor::on_message(const Message* const message) {
switch(message->id) {
case Message::ID::UpdateSpectrum:
case Message::ID::SpectrumStreamingConfig:
channel_spectrum.on_message(message);
break;
case Message::ID::SamplerateConfig:
samplerate_config(*reinterpret_cast<const SamplerateConfigMessage*>(message));
break;
case Message::ID::ReplayConfig:
configured = false;
bytes_read = 0;
replay_config(*reinterpret_cast<const ReplayConfigMessage*>(message));
break;
// App has prefilled the buffers, we're ready to go now
case Message::ID::FIFOData:
configured = true;
break;
default:
break;
}
}
void ReplayProcessor::samplerate_config(const SamplerateConfigMessage& message) {
baseband_fs = message.sample_rate;
baseband_thread.set_sampling_rate(baseband_fs);
spectrum_interval_samples = baseband_fs / spectrum_rate_hz;
}
void ReplayProcessor::replay_config(const ReplayConfigMessage& message) {
if( message.config ) {
stream = std::make_unique<StreamOutput>(message.config);
// Tell application that the buffers and FIFO pointers are ready, prefill
shared_memory.application_queue.push(sig_message);
} else {
stream.reset();
}
}
int main() {
EventDispatcher event_dispatcher { std::make_unique<ReplayProcessor>() };
event_dispatcher.run();
return 0;
}proc_gps_sim.hpp
#ifndef __PROC_GPS_SIM_HPP__
#define __PROC_GPS_SIM_HPP__
#include "baseband_processor.hpp"
#include "baseband_thread.hpp"
#include "spectrum_collector.hpp"
#include "stream_output.hpp"
#include <array>
#include <memory>
class ReplayProcessor : public BasebandProcessor {
public:
ReplayProcessor();
void execute(const buffer_c8_t& buffer) override;
void on_message(const Message* const message) override;
private:
size_t baseband_fs = 0;
static constexpr auto spectrum_rate_hz = 50.0f;
BasebandThread baseband_thread { baseband_fs, this, NORMALPRIO + 20, baseband::Direction::Transmit };
std::array<complex8_t, 2048> iq { };
const buffer_c8_t iq_buffer {
iq.data(),
iq.size(),
baseband_fs
};
uint32_t channel_filter_pass_f = 0;
uint32_t channel_filter_stop_f = 0;
std::unique_ptr<StreamOutput> stream { };
SpectrumCollector channel_spectrum { };
size_t spectrum_interval_samples = 0;
size_t spectrum_samples = 0;
bool configured { false };
uint32_t bytes_read { 0 };
void samplerate_config(const SamplerateConfigMessage& message);
void replay_config(const ReplayConfigMessage& message);
TXProgressMessage txprogress_message { };
RequestSignalMessage sig_message { RequestSignalMessage::Signal::FillRequest };
};
#endif/*__PROC_GPS_SIM_HPP__*/最后还有个关系不大的,除了生成固定采样点,还可以生成一段轨迹,然后用portapack发射出去下面是根据circle.csv轨迹生成的iq数据。
./gps-sdr-sim -e brdc3540.14n -u circle.csv -b 8 -s 2000000
轨迹文件最大支持300秒的长度,8bit 2MHz采样率,大小是1.2GB文件。我测试了手机和gnss-sdr都能锁定,能看到位置在变化。