by vcbear
关键字:
GPS:Global Position System, 全球定位系统
NMEA:National Marine Electronics Association 全国海洋电子协会
SiFR:u-blox公司的GPS模块二进制数据协议
WGS 84:World Geodetic System 1984
LLA: Longitude/Latitude/Altitude经纬度和海拔
简述:
本文介绍采用GPS接受模块,GIS控件开发GPS/GIS应用软件的一些要点。不涉及复杂的地理信息理论,主要是针对协议和接口的应用开发
一:GPS 模块应用
GPS(全球定位系统)接受硬件上已经模块化,这里主要基于我使用过的u-blox TIM GPS(以下简称TimGPS)来介绍。
TimGPS模块如图(几乎是1:1比例):
 此模块提供和GPS卫星通信的功能,对外提供FFC20接口,可以给它增加电源,接口板,串口模块,使之可以通过串口和计算机连接。
此模块提供和GPS卫星通信的功能,对外提供FFC20接口,可以给它增加电源,接口板,串口模块,使之可以通过串口和计算机连接。
如何开发串口程序在本文中不再介绍,无论在windows/linux下开发串口串口程序都是很简单的事情。
TimGPS对外提供标准NMEA协议和厂家自己的SiRF二进制协议。
1.1 NMEA(National Marine Electronics Association) 0183协议
NMEA 0183是一种航海、海运方面有关于数字信号传递的标准,此标准定义了电子信号所需要的传输协议,传输数据时间。这个协议是文本格式的。大致如下
Start Sequence |
Payload |
Checksum |
End Sequence |
消息头
|
消息体,具体数据和NMEA消息字相关,数据之间用逗号(,)间隔。 2243.4976,N,11414.7289,E,091828.819,A
|
校验码,格式为*[16进制数]如*2C |
回车换行 <CR> <LF>4
|
协议头,格式为输出:$GPxxx,xxx为输出消息字如GLL.输入:$PSRF<MID>MID为输入消息字.
1.1.1NMEA协议输出和输入消息
NMEA协议有以下输出消息
消息字 |
内容 |
GGA |
时间,位置,定位数据 |
GLL |
经纬度,UTC格式时间,位置和状态数据 |
GSA |
接收机模式和卫星工作数据,包括位置和水平/竖直稀释精度等。稀释精度(Dilution of Precision)是个地理定位术语.一个接收器可以在同一时间得到许多颗卫星定位信息,但在精密定位上,只要四颗卫星讯号即已足够了 |
GSV |
接收机能接收到的卫星信息,包括卫星ID,海拔,方位角,信噪比等 |
MSS |
信号比(SNR),信号强度,频率,比特率 |
RMC |
日期,时间,位置,方向,速度数据。是最常用的一个消息 |
VTG |
相对地面的方向和速度数据 |
ZDA |
时间和日期数据。 |
和地理信息密切的相关的消息如下,各消息之间包含的信息字段有出入也有重复,在一轮消息循环里,各消息相同的字段中包含相同的地理数据。可以综合多个消息,来获取完整的数据。
|
日期 |
时间 |
纬度 |
经度 |
海拔 |
定位状态 |
卫星数 |
地面速度 |
方向角 |
GGA |
|
√ |
√ |
√ |
√ |
√ |
√ |
|
|
GLL |
|
√ |
√ |
√ |
|
√ |
|
|
|
RMC |
√ |
√ |
√ |
√ |
|
√ |
|
√ |
√ |
VTG |
|
|
|
|
|
|
|
√ |
√ |
ZDA |
√ |
√ |
|
|
|
|
|
|
|
以下为u-lox厂商扩充的输出消息
PSRF150 |
OK-to-send指令,在节电模式中表示进入工作状态
|
PSRF161 |
硬件状态报告 |
工作在NMEA模式时,TimGPS可以有以下输入消息.输入消息一般是用于控制GPS的运行的。
消息字 |
内容 |
100 |
设置串口参数和协议 |
101 |
XYZ导航坐标初始化。输入参数按 WGS84坐标系确定 |
102 |
设置DGPS端口 |
103 |
设置或查询数据输出频率。可以设置每个NMEA消息的是否输出和输出频率 |
104 |
输入当前经纬度和海拔来初始化模块 |
105 |
开发调试数据开关 |
106 |
(u-blox)可以改变大地基准坐标系,默认是WGS-84坐标系 |
107 |
(u-blox)配置节电模式 |
108 |
(u-blox)进入下载模式,更新Flash |
MSK |
设置MSK信号接收机参数 |
每个协议的具体格式,可以到网上下载具体的NMEA协议。
1.1.2 NMEA消息的接收和解析
当接收机工作在NMEA协议时,以一定的速率向外输出数据。如
$GPGGA,140144.000,2232.2513,N,11401.6763,E,1,04,,20.3,M,,M,,0000*58
$GPGLL,2232.2513,N,11401.6763,E,140144.000,A*35
$GPRMC,140144.000,A,2232.2513,N,11401.6763,E,9.17,,140703,,*12
$GPVTG,,T,,M,9.17,N,17.0,K*47
$GPGGA,140148.000,2232.2654,N,11401.6738,E,1,04,,36.1,M,,M,,0000*5F
$GPGLL,2232.2654,N,11401.6738,E,140148.000,A*37
$GPRMC,140148.000,A,2232.2654,N,11401.6738,E,12.95,,140703,,*20
$GPVTG,,T,,M,12.95,N,24.0,K*77
最好将所有的消息输出速率设置为相同的(使用输入指令103),或者根据具体情况打开或关闭一些不不需要的消息。
消息里各字段的格式都不复杂,以下几个稍微注意:
l 经纬度的表示法为ddmm.mmmm和方向指示,以纬度举例:当纬度为9730.765,方向指示为N,则表示为北半球的97度30.765分.有的地理信息组件使用经纬度的时候不用度分秒表示法,而是用浮点数表示法,那么97度30.765分就约等于97.5(97+30.765/60)度。
l 方向角以正北向为0度,正东向为90度,也就是顺时针方向从0度增加到359度
l 校验码为一个消息包(包括消息头和体)里每个ASCII字符的值依次进行异或得到,算法(c++代码)如下
unsigned char CheckSum(string s)
{
unsigned char c = 0;
for(int o=1;o<s.size();o++)
{
unsigned char h = s[o];
c ^= h;
}
return c;
}
sprintf(StrCheckSum,"*%02X",CheckSum(data) );
一般的地理数据,只取RMC消息包就够了,如果还需要其他的数据,比如当前卫星数,卫星状态等等,又或者接受机本身关闭了RMC消息包,只输出其他的消息包,那么就需要解析其他消息包。
应用程序逐行分析消息包。我的做法是先将消息包按逗号分割原则解析成一个字符数组,然后根据包头指令字,按协议含义取数组里的字符串。
ParseMessage(sMessage,Array)); //将一行消息解析到字符串数组Array里
if (Array[0].CompareTo("$GPRMC") ==0 ) //是RMC消息
{
if(Array.size()!=12) //要求有12个字段
return -1;
//以下依次填充RMC数据结构
recRMC Rmc
Rmc.UTCTime = Array[1];
Rmc.Status = Str2Char(Array[2]);
Rmc.Latitude = Array[3];
Rmc.Latitude.DirIndicator = Str2Char(Array[4]);
Rmc.Longitude = Array[5];
Rmc.Longitude.DirIndicator = Str2Char(Array[6]);
Rmc.SpeedOverGround = Str2Num(Array[7]);
Rmc.CourseOverGround = Str2Num(Array[8]);
Rmc.Date = Array[9];
Rmc.Magnetic[0] = Str2Char(Array[10]);
Rmc.Checksum = (int)Str2Hex(Array[11]);
//检查CheckSum,
return CheckSum(Rmc.CheckSum,sMessage);
}
以类似的方法构造解析其他消息的函数。组消息包则是依次将字段转成字符串连接起来,最后附加校验码即可。
1.2 SiFR协议.
SiFR协议是GPS模块厂商制定的二进制协议,提供了对GPS模块操作的更多接口,厂家号称此协议(用于操作本家的模块)更稳定,更高效,更容易操作。
1.2.1协议格式
消息头 |
消息体长度 |
消息体 |
校验码 |
消息结束符 |
双字节 0xA0 0xA2 |
双字节 |
长度小于1023字节的数据 |
双字节 |
双字节 0xB0 0xB3 |
具体消息格式可以参考厂家提供的协议文档(GPS.G2-X-01003-E.pdf)。
1.2.2 日志操作
SiFR包括了读取地理数据,刷写Flash,配置GPS模块参数,读取/擦写日志等一系列的操作。以日志操作最为有用。TimGPS可以脱离计算机运行,将所到之处的地理信息保存在内部存储器里,然后再接上计算机,获取地理信息日志,得到携带该GPS的载体在一段时间里运行轨迹。
读取Log的大致过程是 :
读取Log Sector信息,得到最小Sector号和最大Sector号,依次发指令读取每个Sector的Log信息,并解析转换成NMEA协议消息。
擦除Log时,虽然u-blox提供了全部擦除指令,实际应用的时候发现该指令成功率不高。还是依次发指令逐个擦除比较好。
TimGPS的log格式定义在厂家提供的TIM_Data_Logger_Manual(GPS.G2-SW-02015).pdf里。
日志中包含的消息如下
消息号 |
消息名 |
字节数 |
内容 |
111 |
NONE |
1 |
无数据 |
100 |
FIX_FULL |
9 |
全部地理定位信息 |
100 |
FIX_INCL |
5 |
地理定位信息,增量数据 |
000 |
FIX_INCM |
4 |
地理定位信息,增量数据, 在字节上比FIX_INCL少一个 |
110 |
FIX_INCS |
3 |
地理定位信息,增量数据,使用更少的字节数 |
101 |
GPIO_FULL |
3 |
GPIO( General-purpose_input/output)数据 |
011 |
GPIO_INC |
2 |
GPIO数据,增量数据 |
001 |
ESCAPE |
不定 |
用于扩展 |
以上所有消息都是二进制编码,按位存储,解析消息需要使用二进制位操作。
消息解析成功后,u-blox建议按以下逻辑处理这些消息
WHILE (Data) --读入新数据
--获取消息类型,并根据消息类型得到对应消息的字节数
IF (Type = EMPTY) THEN -- 空数据,跳过
ELSE IF (Type = FIX_FULL) THEN - 保存时间信息,保存位置,速度和其他模式信息
ELSE IF ((Type = FIX_INCL) OR (Type = FIX_INCM) OR (Type = FIX_INCS)) THEN
-- 将时间和位置增量数据叠加到最近一个定位记录上,保存速度数据
ELSE IF (Type = GPIO_FULL) THEN -- 保存时间和GPIO数据
ELSE IF (Type = GPIO_INC) THEN -- 叠加时间到最近一个GPIO数据的时间字段上,保存GPIO数据
ELSE IF (Type = ESCAPE) THEN --处理自定义数据
-- END IF
END WHILE
1.2.3WGS84->LLA转换问题
在分析其日志的过程中,遇到一个问题,就是TimGPS二进制日志保存的坐标数据是以WGS84大地坐标系为准的,大地坐标系的XYZ轴如下:
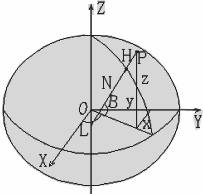
要得到经纬度和海拔(LLA:Longitude/Latitude/Altitude)坐标,需要一些椭球体、基准面及地图投影的知识。
后来从网上找到一个Fortune77写的WGS84->GLL换算函数,将其转成C/C++的函数:
void wgsxyz2lla(double x,double y,double z,double *lat,double *lon,double *alt)
{
double pi = 3.14159265357;
longA_EARTH = 6378137;
double flattening = 1/298.257223563;
double NAV_E2 = (2-flattening)*flattening; // also e^2
double rad2deg = 180/pi;
double wlon,wlat,walt,rhosqrd,rho,templat,tempalt,rhoerror,zerror;
double slat,clat,q,r_n,drdl,invdet,aa,bb,cc,dd;
if ((x == 0.0) & (y == 0.0))
wlon = 0.0;
else
wlon = atan2(y, x)*rad2deg;
if ((x == 0.0) & (y == 0.0) & (z == 0.0))
{
printf("WGS xyz at center of earth");
wlon = 360;
wlat = 360;
walt = 6378137;
}
else
{
rhosqrd = x*x + y*y;
rho = sqrt(rhosqrd);
templat = atan2(z, rho);
tempalt = sqrt(rhosqrd + z*z) - A_EARTH;
rhoerror = 1000.0;
zerror = 1000.0;
while ((Dabs(rhoerror) > 1e-6) | (Dabs(zerror) > 1e-6))
{
slat = sin(templat);
clat = cos(templat);
q = 1 - NAV_E2*slat*slat;
r_n = A_EARTH/sqrt(q);
drdl = r_n*NAV_E2*slat*clat/q; // d(r_n)/d(latitutde)
rhoerror = (r_n + tempalt)*clat - rho;
zerror = (r_n*(1 - NAV_E2) + tempalt)*slat - z;
aa = drdl*clat - (r_n + tempalt)*slat;
bb = clat;
cc = (1 - NAV_E2)*(drdl*slat + r_n*clat);
dd = slat;
invdet = 1.0/(aa*dd - bb*cc);
templat = templat - invdet*(+dd*rhoerror -bb*zerror);
tempalt = tempalt - invdet*(-cc*rhoerror +aa*zerror);
}
wlat = templat*rad2deg;
walt = tempalt;
}
if(lon )*lon = wlon;
if(lat )*lat = wlat;
if(alt )*alt = walt;
}
结语:开发GPS应用软件的要点在于理解相关的协议和接口,仔细处理协议字段。
《基础GIS系统应用开发》 Comming soon....