前言
上一篇数据结构文章分析了二叉树的实现及其遍历方法,学习了树形结构。但当时我没有思考为什么要学习树形结构这个问题。这篇堆和堆排序是二叉树的应用分析,回答了这个问题。
堆(Heap)
堆是什么
堆是一颗有最大堆和最小堆之分 / 在最大堆中每个节点的值都大于等于其子节点(如果有子节点的话)的值 / 最小堆定义类似 / 的完全二叉树。
堆的基本操作包括初始化堆,插入堆,获取堆元素,删除堆。其中获取和删除操作只能依次获取堆中优先级最高的元素。
为什么要使用堆
首先我们要了解什么是优先级队列,也就是本章的标题。
优先级队列:FIFO的队列和FILO的栈,元素的pop()顺序由元素进入队列的顺序决定。而优先级队列,元素pop()的顺序由元素的优先级决定。可以按优先级递增,也可以是优先级递减。也就是说元素输出的顺序和元素进入的顺序无关。
堆属于优先级队列,虽然优先级队列有队列两个字,但优先级队列和队列完全是两个不同的概念和层级。千万不能以为是从属关系。
如果我现在有一个将n个元素按其优先级输出的需求。可以考虑以下三种存储结构。
- 数组
- 链表
- 二叉树
对于数组,插入操作花费时间为O(1), 获取优先级最高的元素所需时间为O(n),因为要遍历n个元素确定优先级最高的元素。
对于链表,与数组的操作时间相同。
对于二叉树,我们维护一个堆,插入和依次获取元素的时间复杂度皆为O(logn),我将在下面的内容中进行解释。
在这个需求中,无疑是堆的综合性能表现最好。这便是堆的价值之一。
堆的实现及时间复杂度分析
因为堆是一颗完全二叉树,特别适合用数组实现,所以以下是用数组实现的一个最大堆(MaxHeap)。
堆的类声明
template <class T>
class MaxHeap
{
public:
MaxHeap(int theMaxSize = 10);
~MaxHeap(){delete [] heap;};
int empty() const {return CurrentSize == 0;}
int Size() const {return CurrentSize;}
const T& top() const // 引用返回,不能作为左值,第二const表示不能修改类成员变量
{
if(CurrentSize == 0)
throw OutOfBounds();
return heap[1];
}
const T& pop();
void push(const T& theElement);
void initialize(T *theheap, int theSize);
private:
int currentSize;
int maxSize;
T* heap;
};
template class<T>
MaxHeap<T> :: MaxHeap(int theMaxSize)
{
currentSize = 0;
maxSize = theMaxSize;
heap = new T[MaxSize + 1];
}
堆的插入方法
template class<T>
void MaxHeap<T> :: push(const T& theElement)
{
if(currentSize == MaxSize)
throw "have no memory";
int currentNode = ++currentSize;
while(currentNode != 1 && theElement> heap[currentNode/2])
{
heap[currentNode] = heap[currentNode/2];
currentNode /= 2;
}
heap[currentNode] = theElement;
}
时间复杂度:
将元素插入最后一位,再进行向上冒泡,即如果父节点的值小于被插入的元素,父节点下移,被插入的元素上移。时间复杂度取决于树的高度h。而完全二叉树的树的高度为[logn+1]的上取整,所示时间复杂度为O(logn)。
堆的删除方法
template class<T>
const T& MaxHeap<T> :: pop()
{
if(currentSize == 0)
throw "the heap is empty.";
T res = heap[1];
delete heap[1];
T lastElement = heap[currentSize--];
int p = 1; // p可以被 child/2代替,但会多执行几次计算
int child = 2;
while(child <= heapSize)
{
if(child < heapSize && heap[child] < heap[child+1]) //child < heapSize避免了溢出
child++;
if(lastElement >= heap[child]) // 不需要重构堆
break;
heap[p] = heap[child];
p = child;
child *= 2;
}
heap[p] = lastElement;
return res;
}
时间复杂度:
删除操作的逻辑为,删除堆的根节点,将最后一个节点补到根节点位置,得到一颗不符合规则的堆。再对根节点进行向下冒泡,即如果父节点小于某一孩子或所有孩子,将元素值最大 的孩子与父节点交换。孩子上移,父节点下移,下移后与孩子重复该操作,直到比孩子都大或没有孩子。
删除操作向下冒泡,操作时间还是取决于树的高度,时间复杂度为O(logn)
初始化堆
template<class T>
void :: MaxHeap<T> initialize(T* theHeap, int theMaxSize,int theCurrentSize)
{
// 把原有的大根堆删掉
delete [] heap;
heap = theHeap;
maxSize = theMaxSize;
currentSize = theCurrentSize;
for(int root = currentSize /2 ; root >= 1; root--) //在完全二叉树中,最后一个具有孩子的节点为n/2
{
T rootElement = heap[root];
int child = root*2;
while(child <= heapSize) //执行和删除操作中相同的向下起泡过程
{
if(child < heapSize && heap[child] < heap[child+1])
child++;
if(rootElement >= heap[child])
break;
heap[child/2] = heap[child];
child *= 2;
}
heap[child/2] = rootElement;
}
}
时间复杂度:
初始化堆的逻辑为,给你一个未按规则排序的数组,进行原地重排使之符合堆的要求。具体操作为找到最后一个拥有孩子的节点,在完全二叉树中位置为[n/2]详细取整。对该节点和之前的节点进行遍历,每次遍历执行向下冒泡操作。
因为有n/2个元素需要执行和删除相似的操作,所以时间复杂度乍一看应该是O(nlogn)。但是,并不是每个元素都需要时间为O(h)的向下冒泡操作。
实际上,只有根节点向下冒泡的操作所需时间为O(h),根节点的孩子节点所需时间为为O(h-1),第i层节点的向下冒泡操作时间为O(h-i)。
根据完全二叉树的性质,第1层的节点数为1,第二层为2,第i层最多为2^(i-1)。
将每层的节点数与要操作的次数相乘再求和,可得
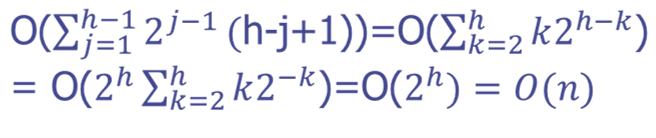
其中k/2^k的求和是高中的一个知识点,将和式乘1/2得到另一等式,再交叉相减便可解出。
综上,初始化堆的时间复杂度为O(n)
堆排序
如果将优先级看作元素的大小,对数组进行堆的初始化操作再依次删除取出元素,便可得到排好序的数组。
template class<T>
void MaxHeap<T> :: deactivate()
{
heap = NULL;
}
template <class T>
void heapSort(T a[], int n)
{
maxTeap<T> heap(1); // 首先利用构造函数建立最大堆
initialize(a, n); // 堆的初始化
// 通过删除从最大堆中提取元素
for(int i = n-1; i>=1; i--)
{
a[i+1] = heap.pop();
}
heap.deactivate(); //从堆的析构函数中保存数组a,heap等于空,析构函数调用了个寂寞
}
时间复杂度
初始化堆的时间复杂度为O(n)
n-1次删除操作的时间复杂度为O(nlogn)
所以总操作时间复杂度为O(nlogn)
但是如果像初始化堆那样分析,每删除一个元素,总元素减一。
n-1次删除操作,操作时间应该为log(n)+log(n-1)+…+log(3)+log(2) = log(n!)。
且(n/2)^(n/2) ≤ n!≤ n ^ n,即 1/4*nlog(n) ≤ n! ≤ nlogn。常数可舍去,时间复杂度仍为O(nlogn).
多说一句:
堆排序是数据结构复习到现在第一个最坏时间复杂度为O(nlogn)的通用排序算法,优于插入、冒泡、选择这些基本排序方法。且比基数排序和箱子排序适用范围广。