一、特征值&特征向量
1.1 直观印象
如果把矩阵看作是运动,对于运动而言,最重要的是运动的速度和方向,那么:
- 特征值就是运动的速度
- 特征向量就是运动的方向
既然运动最重要的两方面都被描述了,特征值、特征向量自然可以称为运动(矩阵)的特征。
注意:由于矩阵是数学概念,非常抽象,所以上面所谓的运动、运动的速度、运动的方向都是广义的,在现实中有不同的替代。
1.2 几何意义
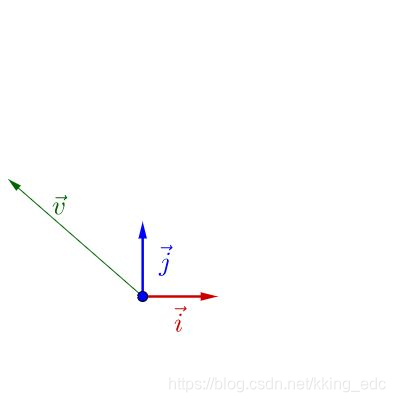
在下面的图中画出了基和向量(在
为基的空间里有向量
)
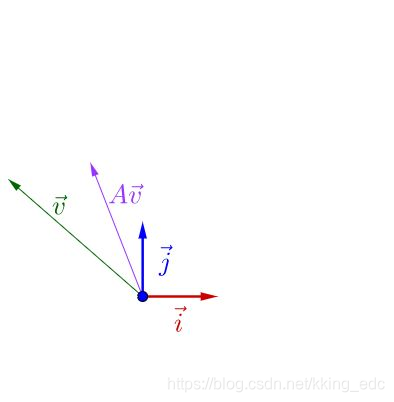
随便左乘一个矩阵A,图像看上去没什么特殊的:
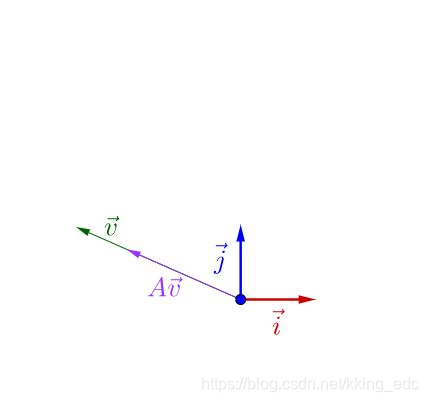
这时如果调整下
的方向,图像看上去就有点特殊了
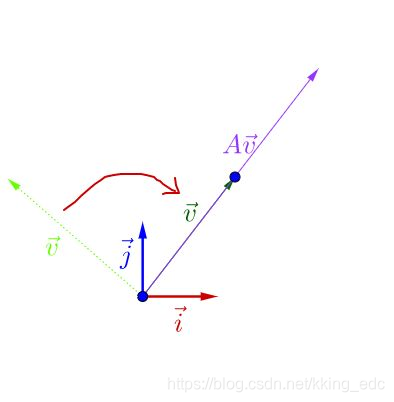
我们可以观察到,调整后的
和
在同一根直线上,只是
的长度相对
变长了,我们就称
是A的特征向量,而
的长度是
的长度的
倍,
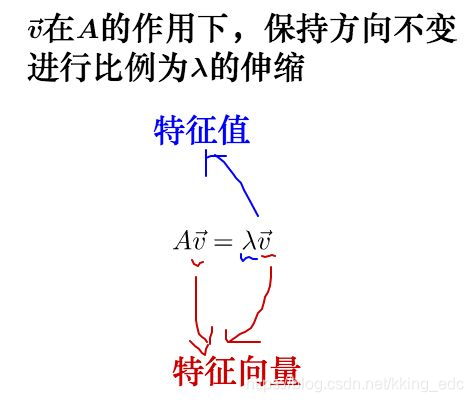
就是特征值。从而,特征值和特征向量的定义如下:
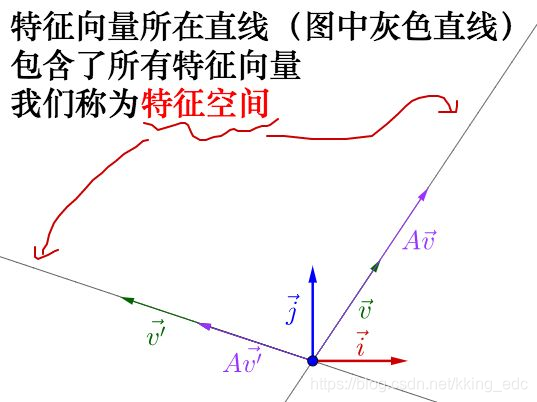
其实之前的A不止一个特征向量,还有另一个特征向量:
可以看出这两个特征值一个大于1一个小于1.
从特征向量和特征值的定义还可以看出,特征向量所在直线上的向量都是特征向量。
1.3 运动的速度和方向
一般来说,矩阵我们可以看作某种运动,而二维向量可以看作平面上的一个点(或者一个箭头)。对于点我们是可以观察的,但是运动我们无法直接观察。
就好像,跑步这个动作,我们不附加到具体的某个事物上是观察不到的,我们只能观察到:人跑步、猪跑步、老虎跑步,…,然后从中总结出跑步的特点。
从以上例子来理解矩阵,要观察矩阵代表的运动,需要把它附加到向量上才能观察出来。
首先进行一次乘法:
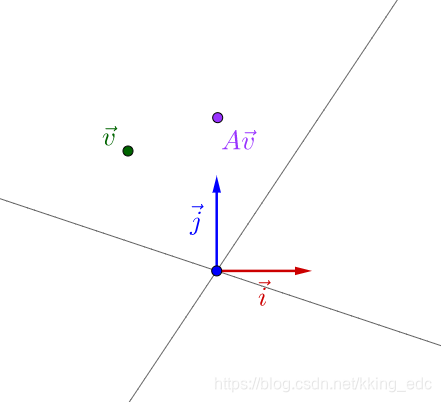
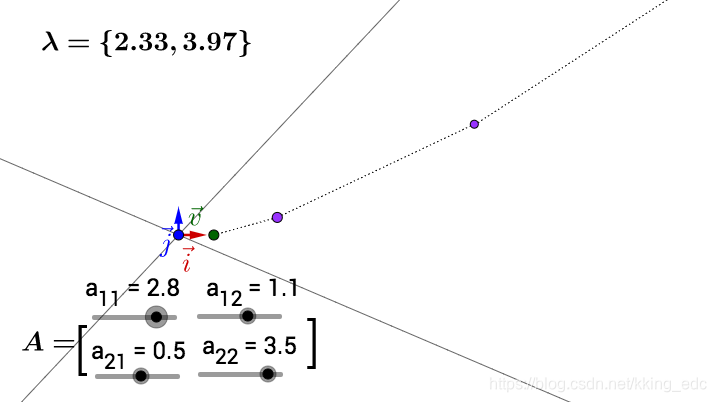
这个看不出明显的规律,如果进行多次乘法:
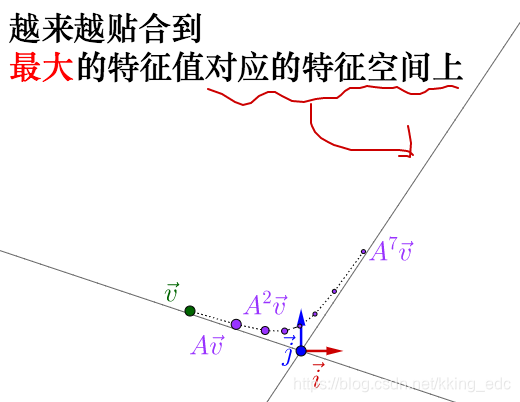
这个时候矩阵所代表的运动的最明显的特征,即速度最大的方向,就由最大特征值对应的特征向量展现了出来。
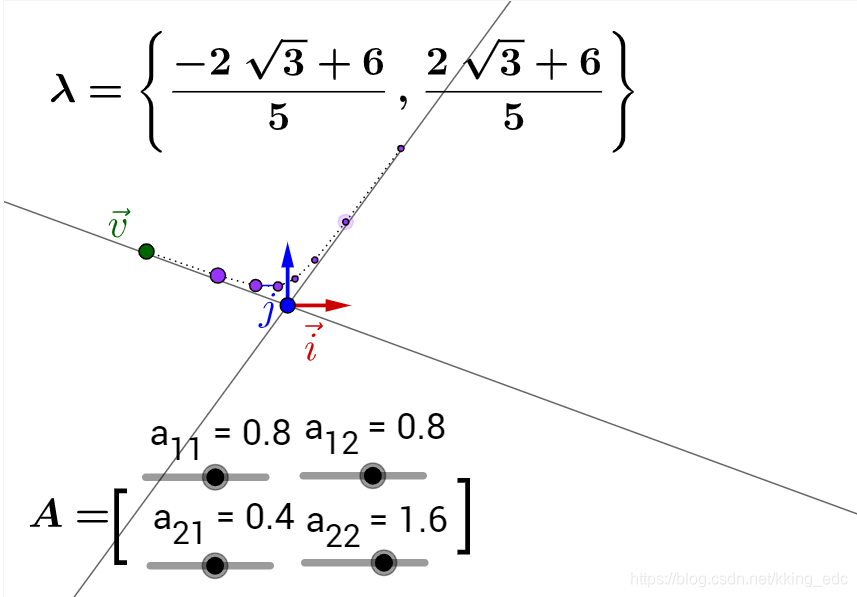
(对于复数的特征值、特诊向量,在上面就没有画出特征空间,但可以观察到反复运用矩阵乘法的结果是围绕着原点在旋转,关于复数特征值和特征向量在这里没有展开说)
1.4 特征值分解
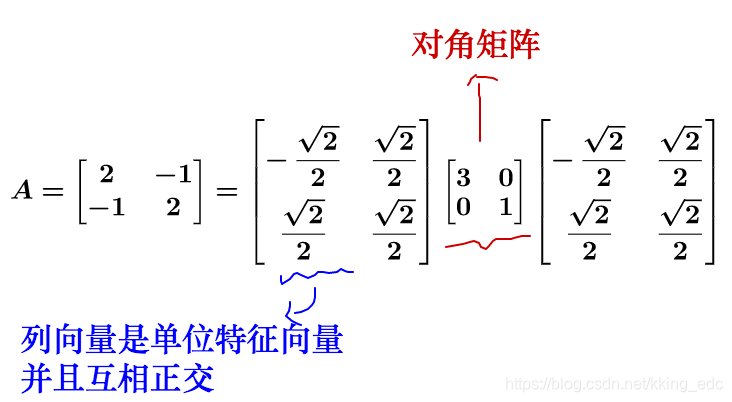
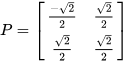
我们知道,如果矩阵A可对角化的话,可以通过相似矩阵进行如下的特征值分解:
其中
为对角阵,P的列向量是单位化的特征向量,以下是一个具体的例子:
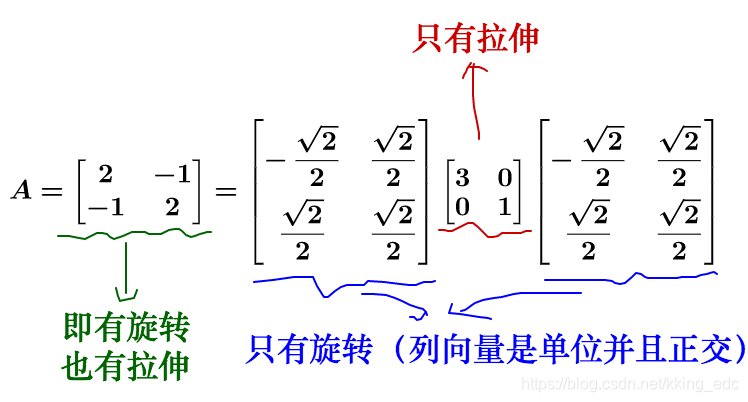
对于方阵的乘法,矩阵不会进行维度的升降,所以矩阵代表的运动实际上只有两种:
- 旋转
- 拉伸
最后的运动结果就是这两种的合成。
我们回头看下刚才的特征值分解,实际上把运动給分解开了:
然后看下在几何上的表现:
假如存在这样一对单位特征向量,然后有着在这样一对特征向量下的正方形:
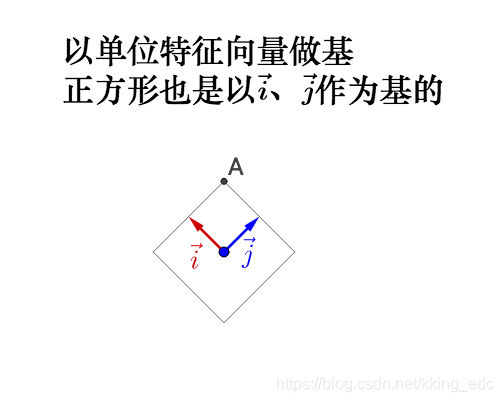
此时左乘P:
可以得到:
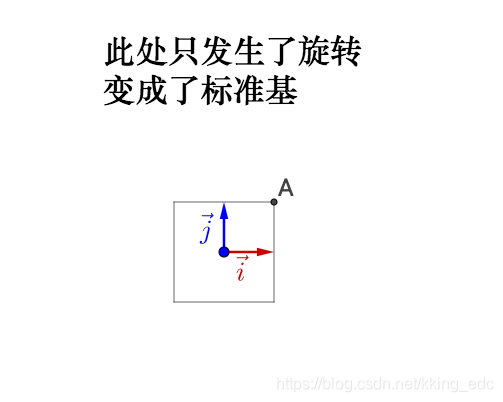
注意:
如果旋转前的基不正交,旋转后变成了一个不正交的标准基,那么实际会产生伸缩,所以之前说的正交很重要。
继续左乘对角矩阵:

可以得到:
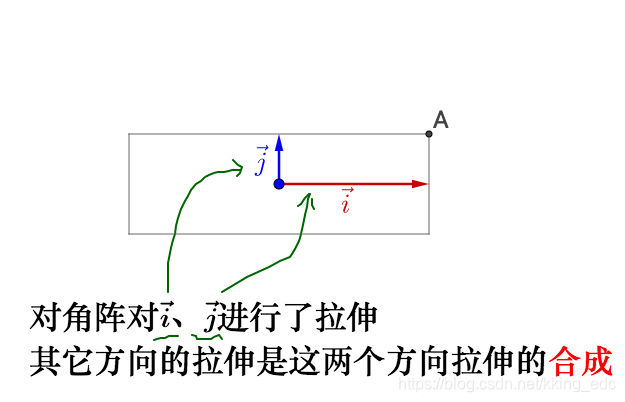
相当于,之前的旋转指明了拉伸的方向,所以我们理解了:
- 特征值就是拉伸的大小
- 特征向量指明了拉伸的方向
回到之前所说的运动,特征值就是运动的速度,特征向量就是运动的方向,而其余方向的运动就由特征向量方向的运动合成。所以最大的特征值对应的特征向量指明了运动速度的最大方向。
但是注意,上面的推论有一个重要的条件,这个条件就是特征向量正交,这样变换后才能保证变换最大的方向在基方向。如果特征向量不正交就有可能不是变化最大的方向,比如:
所以我们在实际应用中,都要去找正交基。但是特征向量很有可能不是正交的,那么我们就需要奇异值分解(在这里不展开)。
https://www.matongxue.com/madocs/228.html
1.5 关于特征值的计算
已知n阶矩阵A的特征值为 , 为x的多项式,则P(A)的特征值为: