Hello,everyone!
我是CS科研GO,一个热衷于科研和软开的胖子!
论文题目:Smartphone-based Real-time Indoor Location Tracking with One-meter Precision
论文作者:Po-Chou Liang,Paul Krause;
工作单位:University of Surrey,UK;
发表期刊:IEEE Journal of Biomedical and Health Informatics(SCI二区),2015。
今天为大家介绍一篇室内定位领域论文,作者利用传感器融合机制实现的室内定位追踪系统,在iPhone 5上的定位误差小于1米。
1. 前言
-
监测居家老年人的日常生活活动有助于发现新的或恶化的健康状况。然而,现有的室内位置跟踪系统的准确性仍不令人满意。因此,此研究目的是开发一个定位系统,能够识别患者在家庭环境中的实时位置。
-
论文基于传感器融合方法构建的概念验证系统考虑了更低的成本、更少的侵入性以及更高的移动性、可部署性和可移植性。论文利用iPhone 5的加速度计和陀螺仪开发计步器,并使用卡尔曼滤波器和接收信号强度指示(RSSI)来开发一个定位系统。
-
实验结果表明,系统平均估计误差为0.47米。
2. 研究背景
-
由于实时家庭医疗远程监护的成本较高,因此系统改进的主要考虑因素包括更低的成本、更少的干扰以及更高的移动性、可部署性和可移植性。此类系统包括监测用户的生命体征、安全和位置跟踪。
-
为降低系统成本,论文提出了一个客户端实时室内位置跟踪系统,该系统由一个用户代理模块(基于iPhone 5)和一些低成本传感器组成。
-
系统的基本要求:在95%的置信水平下,识别患者在家庭环境中的实时位置,最大估计误差为2米。
3. 预备知识
3.1 步行检测研究
此类研究利用传感器的高采样率,虽然提供了更精确的测量,但会显著消耗智能手机的电池。此外,安装在脚背上的传感器和同时使用两部智能手机都是不实用的。
3.2 基于无线电的室内定位研究
目前,室内定位的工作成果还并不能广泛应用于人们的日常生活中。此外,从这些工作中得到的经验教训表明,需要开发一种适用于智能手机执行的轻量级但精确的定位算法;避免采用详细的无线电地图,以及过多的硬件安装。这将有助于实时远程监控系统以更低的成本实现更高的机动性、可靠性、可部署性和可移植性。
3.3 RSSI
从理论上讲,RSSI基于平方反比定律,即无线信号强度与到信号源的距离的平方反比。然而,现实生活中由于多径衰落、室内阴影、干扰等问题,大大增加了基于RSSI的距离估计的复杂性。
3.4 卡尔曼滤波器
由于卡尔曼滤波器与蒙特卡罗滤波器相比计算简单,且前者有更好的收敛速度,所以论文选择前者来构建定位算法。
4. 系统设计与实现
文中考虑使用BLE传感器,通过RSSI数据进行位置估计。然而,iPhone 5的RSSI更新速率每秒一次,使得RSSI结果不可靠。因此,论文采用传感器融合的方法来进行位置估计。基于这种方法,设计并实现了步长检测器、用于距离估计的卡尔曼滤波器和估计优化机制。
4.1 步长检测算法
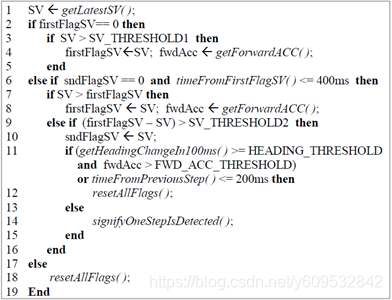
- 基于经验,定义两个阈值,SV_THRESHOLD1=1.07,
SV_THRESHOLD2=0.209。若满足上述阈值,则当前进加速度小于或等于FWD_ACC_THRESHOLD=0.3或100毫秒以内的航向角度变化等于或小于HEADING_THRESHOLD=7°,则检测到一步。 - 如果在200毫秒内检测到两步,则第二步被认为存在问题,因此舍弃。
- 只要在iPhone 5收到来自BLE的RSSI更新,目标的新位置以及目标与每个BLE之间的距离,根据步长的预定义长度(例如0.65米)和航向数据进行计算。
4.2 卡尔曼滤波器
-
卡尔曼滤波器用于估计目标到BLE间的距离,表示为 , 为BLE序号, 为时刻。
-
从传感器接收到新的RSSI更新后,由步长检测器计算出的距离信息将用作卡尔曼滤波器的控制信号 。利用卡尔曼滤波器开始新的状态估计之前,为使目标运动与RSSI测量同步,需等待RSSI更新。
-
当检测一步时,根据经验,设置0-0.13m作为过程噪声w_(i,k)。过程噪声的协方差 , 为期望;测量噪声 等于转换距离乘以噪声因子0.6。时间更新方程和测量更新方程为:
其中,其中, 指在用户代理接收到RSSI更新之间的时间段内,目标与传感器i之间的距离变化; 为从传感器 接收到的RSSI测量值转换而来的距离。
4.3 估计优化机制
为了实时计算目标的位置,文中使用三角定位技术。然而,RSSI测量的不准确和数量不足对距离估计的准确性产生了负面影响。此外,为了估计距离从而在三个圆之间创建交点的过程给系统带来了进一步的噪声。
为此,文中使用紧耦合传感器融合机制解决上述问题。
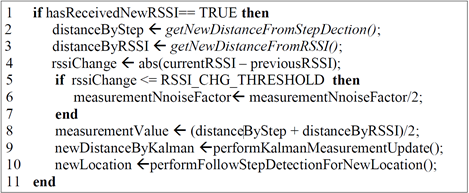
当两个连续RSSI读数之间的差小于或等于RSSI_CHG_THRESHOLD时,这意味着这些RSSI测量值可能比平时更准确,将下一轮卡尔曼滤波器的测量噪声因子减半。然后,该机制使用下面公式选择最接近通过步长检测估计的目标位置的交点,作为该精确时刻目标的最终估计位置。
其中, 为待选位置点, 为步长检测估计出来的位置点。
5. 实验评估
5.1 实验设置
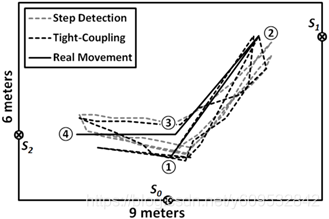
首先将三个BLE传感器(TI SensorTags,分别表示为S0、S1和S2)放置在离地面1.1米高的办公室的三个不同墙壁上。用户手持iPhone 5(传感器采样频率为10Hz),屏幕朝上(约25度仰角),并在水泥墙办公室(9米*6米)内行走长达65秒,进行了24次试验。如图为第22次试验中基于步长检测和紧耦合传感器融合机制的1分钟跟踪路径,以及用户的真实运动(行走序列:1-2-3-4-3-2-3-4-3)。
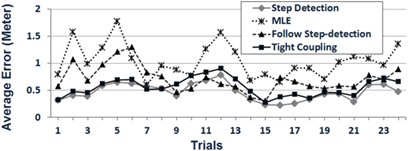
5.2 性能评估
如下图所示,步长检测和紧密耦合传感器融合机制的性能在精度上有一定的相似性,在某些情况下,两者互有优劣。基于前者的总体平均估计误差为0.47米(标准差为0.154米),基于后者的总体平均估计误差为0.56米(标准差为0.165米)。然而,当算法的参数改变时,后者有着更好的健壮性。
此外,若用户以过快的速度或异常的举动(例如大步地或一瘸一拐地)进行运动,可能会严重错误地估计步数,则估计结果可能会非常不可靠。由于实验是基于正常的受试者/用户,未来可以计划使用更广泛的受试者进行进一步的测试和评估,例如患有震颤问题的帕金森氏病患者,以及更多的行走方式。
内容靠得住,关注不迷路。
