基于系统的室内定位
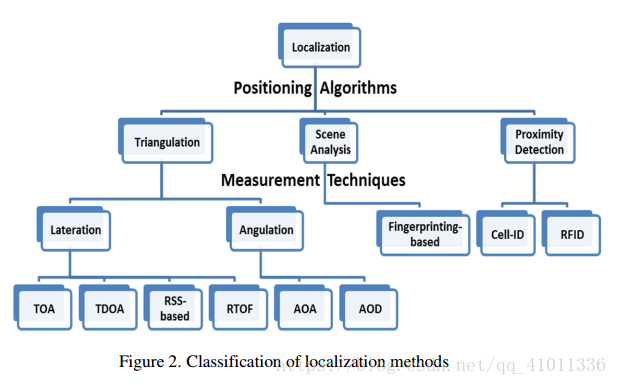
尽管基本定位技术的混合使用提高了定位精度,但现在总是需要更好的方法来实现降低能耗和精度的进一步提高。现今,已经提出的不同的定位技术,可以分为图2所示的类别。在所有这些类别中,研究的重点都是基于新的指标和信号的先进技术,如能量驱动、机会信号(SoOP)、超宽带(UWB)以及传统的WLAN、WSN等系统,因此我们将讨论更多的智能定位技术;具体来说,就是基于超宽带的定位、基于无线局域网的定位和基于传感器的定位。最后,我们将在本节讨论使用SoOPs作为新兴技术来改进定位,然后讨论基于系统的定位技术在能耗和精确度方面的挑战
基于超宽带的定位技术
超宽带技术是基于发射小于1ns的超短脉冲,低占空比从1到1000。UWB中的传输信号通过多个频带发送。UWB允许在室内环境中精确定位和跟踪移动节点。
UWB技术在室内定位等各个领域得到了研究人员和业界的广泛应用,在实现高量程测量分辨率和精度、低截获概率、多路径免疫以及在一个系统中实现定位和数据通信相结合的能力等方面得到了提高。
此外,超宽带技术是高度可扩展的,可以以低成本和低能耗的方式使用
在基于uwb的应用中,通过在目标节点和已知位置的参考节点之间传输的无线电信号估计位置。使用ToA、AoA、RSS、TDoA和第三节中所述的混合技术来完成。基于超宽带技术的定位系统精度达到厘米级。基于ToA或TDoA的三维定位,实现了室内场景下15cm的精度。实际上,多路信号分量由于具有高带宽而被超宽带接收机分解。在满足视距条件(LOS)的场景中,第一个引用LOS组件的路径是用于定位目的的鲁棒路径。然而,如果不是这样,就需要更复杂的技术来精确估计初始延迟。
此外,相对于RSS,基于时间的定位技术在基于UWB的定位应用中提供了更高的定位精度,因为相对于基于时间的定位技术而言,UWB的高带宽并没有被RSS技术有效地用于提高定位精度。另一方面,ToA和TDoA利用UWB信号具有较高的时间分辨率这一事实来提高相对于其他技术的定位精度
基于wlan的定位WLAN-based localization
WLAN是室内定位最常用的解决方案。与GPS、全球移动通信系统(GSM)和蓝牙等技术相比,基于WLAN的定位系统提供了更好的性能。这是由于WLAN定位系统不需要任何额外的软件或硬件操作,但能够根据现有的基础结构执行本地化。RSS是最著名的WLAN定位技术,因为它在802.11网络中易于提取,并且能够在现成的WLAN硬件上运行。另一方面,ToA、TDoA和AoA在基于无线局域网的定位系统中并不常见,因为角度和时间延迟测量是复杂的。
通常,WLAN扫描的目的是寻找可用的网络连接。通常,扫描可以以低速率进行,因为可用网络的集合变化缓慢。当一个设备在获取无线局域网信号的同时,想要估计自己的位置时,需要从APs中进行经常性的RSS测量,以最小化定位误差。定位装置沿轨迹运动时需要定期更新;因此,每个设备以与更新速率相等的速率在所有相关通道上扫描可用的APs。由于平均一组RSS测量值减少了噪声的影响,一个关心定位精度的设备以高于更新率的速度进行扫描。或者,扫描速率比更新速率慢会降低功耗,从而降低定位精度。因此,平衡功耗与定位性能之间的平衡是无线局域网中设备选择扫描参数的主要驱动力。
室内无线局域网主要采用两种方法:单目标方法和多目标方法[27]。这两种方法都是基于可变邻域搜索,旨在减少无线局域网规划过程中的定位误差。无线局域网定位系统与嵌入式智能设备传感器的结合,为移动智能设备[28]实现了精确的室内定位。
基于传感器的定位Sensors Based localization
陀螺仪等惯性传感器在定位中得到了广泛的应用。然而,惯性传感器通常是基于低成本的微电子机械系统(MEMS),存在误差,进而影响定位精度。
基于传感器技术的定位也可分为两类:(1)基于签名技术和(2)基于信标技术。在基于信标的技术中,信标节点(即参考节点)应该使用GPS或手动配置来确定其绝对位置。剩余节点的位置是通过对信标节点的距离/角度测量,然后进行多次测量或三角测量来估计的。
基于传感器的定位是移动系统的一个重要特点,如自主导航、娱乐机器人、服务机器人和军事机器人。
Signals of opportunities (SoOPs)
目前,移动终端实现了GSM、UMTS、LTE等多种通信标准,甚至蓝牙、WLAN等短程通信。因此,这种终端能够监听广泛的无线电信号频谱。这种无线电信号的发射机简直相当于经典导航中的地标。他们的位置是可以得到的,但即使这种SoOP的位置未知,他们的观测仍有可能提高传统移动无线电定位的性能,例如使用下行参考信号。基本上,这些信号不是特定于导航的。SoOPs是用于通信目的的射频信号。SoOP在信号空间多样性和较高的接收功率方面有很多优势。相关工作考虑了基于信号传播延迟估计的用于定位的地面数字视频广播信号。在这里,发射机是固定的,可以合理地假定它们的位置是已知的。Skyhook开发了一个基于WLAN信号的定位系统。这种方法需要一个数据库,必须使用适当的自学算法来学习和保持最新。因此,这种方法从一开始就不假定无线局域网发射机位置的知识。在这里电视和无线局域网信号被结合在一起以改善定位效果。
挑战和缺陷
基于超宽带的定位
1:多径
2:非视距传输
基于wlan的定位
基于无线局域网的定位系统是一种费时费力的现场测量方法。另一个挑战是,这些系统的多路径受到物理对象存在的影响。此外,基于wlan的定位系统可能会干扰2.4 GHz ISM中的其他应用。此外,信号强度随时间的变化被认为是该系统的一个弱点,导致定位精度下降。办公室内人员、门、家具的移动导致信号强度的变化,需要同时更新信号强度图。因此,这被认为是WLAN指纹系统的一个主要缺点。
基于传感器的定位
就方法而言,基于锚点的定位技术由于其精确性,在这种环境中通常是首选的。然而,这种技术也有缺点,例如需要在WSN中安装合适的AN(anchor node)。由于AN成本高、能耗高,必须尽量减少所需的AN数量。基于AN的定位技术的另一个缺点是需要AN的均匀分布,因为在战场和自然灾害环境等许多随机部署传感器节点的环境中,这一标准都不能满足。无线传感器网络中未知节点的定位采用随机选择的AN,但由于AN的特点和无线通信的不确定性,对定位精度的影响不同