系统的判定
认识一个系统的属性,普遍从判断其线性、时不变性、因果性入手。
-
线性性质:
包括齐次性
e(t)→H→r(t)
ke(t)→H→kr(t)(
k为常数)
可加性
e1(t)→H→r1(t)
e2(t)→H→r2(t)
e1(t)+e2(t)→H→r1(t)+r2(t)
-
时不变性:

先移位后进行变换与它先进行变换后再移位是等效的。
-
因果性
仅当输入信号激励系统时才产生系统输出响应的系统。
响应永不超前激励。
例:
判断
r(t)=e(1−t) 是什么系统
1>
e1(t)→H→r1(t)=e1(1−t)
e2(t)→H→r2(t)=e2(1−t)
C1e1(t)+C2e2(t)→H→r(t)=C1e1(1−t)+C2e2(1−t)=C1r1(t)+C2r2(t)
故为线性。
2>
e(1−t)=e(−t+1)
对于
e(t)而言,
可以将
e(t)先反褶(
得到e(−t)),后右移1个单位(
得到e(−(t−1)));
也可将
e(t)先左移1个单位
得到e(t+1),再反褶得到
e(−t+1)。
e(t−t0)→H→r(t)=e(−t−t0)(先反褶),(后时移)e(−(t−1)−t0)=e(1−t−t0)
r(t−t0)=e(−(t−t0)+1)=e(1−t+t0)
前后不等效,故为时不变性。
3>
代入特殊值(一般含有尺度变换的系统不要代0)
r(t)=e(1−t)
r(0)=e(1),响应超前激励,故为非因果。
利用LTI性质解微分方程
根据线性时不变特性,还可推出系统的积分微分特性。

利用该特性可以将较为复杂的系统转化为简单的系统快速求解一些零状态响应。
例:
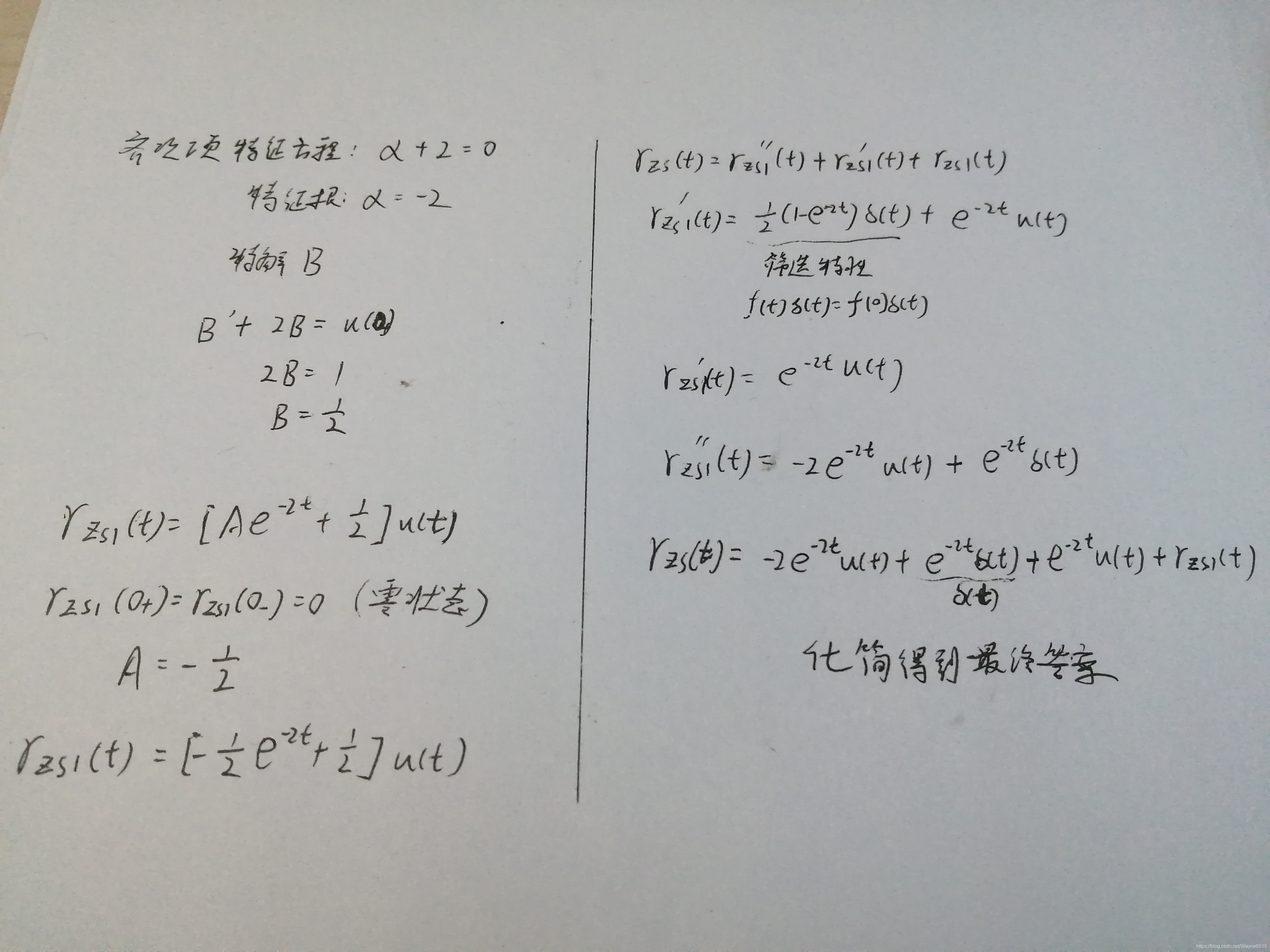
r′(t)+2r(t)=e′′(t)+e′(t)+2e(t)
e(t)=u(t),求
rzs(t)
虽然
r1′(t)+2r1(t)=e1(t)和
r′(t)+2r(t)=e′′(t)+e′(t)+2e(t)
的激励自由项不相同,但系统是一致的。
当输入2个
e1(t)时,
2e1(t)→H→2r1(t)
当输入
e1′(t)时,
e1′(t)→H→r1′(t)
当输入
e1′′(t)时,
e1′(t)→H→r1′′(t)
故
r=r1′′(t)+r1′(t)+2r1(t)
只要求出
r1,
r也就求出来了。
非常适用右端自由项比较复杂的情况。