本博文内容参考了北卡罗来纳大学教堂山分校的文章 An Introduction to the Kalman Filter。
目录
三、KF的计算起源(Computational Origins of the Filter)
四、离散KF算法(Discrete Kalman Filter Algorithm)
一、Kalman Filter简介

1960年R.E. Kalman(匈牙利裔美国数学家,MIT本科,哥大博士。图为卡尔曼老爷子智慧的凝视。)发表了一篇著名的文章,描述离散线性滤波问题的递归解法。随着数字计算技术的不断发展,卡尔曼滤波器已经渗透到各学科领域,尤其是在控制科学和辅助导航领域。KF的本质是一组数学方程,用递归的方式来估计过程的状态(最小化根误差的均值)。KF的强大之处有以下几点:支持对past, present, 甚至是 future states的估计,即使是在系统精度未知的情况下。
二、估计与观测过程
KF的目的是对系统的状态向量x进行估计,一般是列向量n*1。KF通过一个含有随机量的差分方程来对系统的状态进行估计:
其中的x_k-1是当前时刻的状态,x_k是下一时刻的状态。A是n*n转移矩阵,B是n*l控制矩阵。w是状态转移过程的噪音。
因为我们对系统的观测并不是完美的,会存在一些测量噪音。故观测方程为:
其中的H是m*n观测矩阵,将n*1状态转化为m*1观测值。同时还要加上一个观测过程的偏差v。
同时,状态转移过程噪声w和测量噪声v都服从normal probability distributions:
其中Q称为process noise covariance,R称为measurement noise covariance。这两个量会在后续内容中起到重要作用。
三、KF的计算起源(Computational Origins of the Filter)
首先,我们假定一个系统的真实值是无法获取的,但是我们有两个数据来源来去估计状态值:1.可以根据系统的参数(转移矩阵A、控制矩阵B)去推理下一时刻的系统状态;2.我们采用一种有误差的测量方法去测量状态值。
我们定义,根据系统参数推断出的状态叫priori state estimate,即先验状态估计(上标减号意味着还不完整,只是推理出来的值)。在priori的基础上,根据有误差的测量量进行修正过后的状态是posteriori state estimate,即后验估计
。一个例子可以描述一下这个过程:假设体温是以天为单位进行变化,我今天烧37度,然后我根据经验掐指一算明天肯定38度(先验估计),但是真到了明天我拿体温计一量居然是39度,这个破体温计肯定有误差,所以第二天我简单粗暴折衷了一下烧38.5度(后验估计)。
好了,明确了这两个估计值,我们来引入两个误差:(疑问:这个真实值xk应该是永远也不明确的,为何可以直接用于计算?)
先验估计误差:
后验估计误差:
两个误差都是m*1维的列向量,现在将其转化为协方差矩阵:
先验估计误差协方差:
后验估计误差协方差:
接下来我们看一个非常重要的公式,由先验估计和观测值来得到后验估计:
计算后验估计:
其中的称为残差,表示测量值与先验估计的偏差,注意此量的维度是m*1。K是卡尔曼滤波增益矩阵,负责将m*1的测量偏差量映射成为与状态相同维度的量,以便进行加和,K的维度是n*m。其实K的作用就是在调节预测和观测的关系。
接下来的任务就是调节卡尔曼滤波器增益矩阵K的值,使得和真实的
之间误差最小,即后验估计误差协方差
最小。我们使用的方法就是先用
减去
,然后取期望,再对K求导,使倒数为0。最终可以得到K的计算公式:
K计算:
也即:
其中的R是测量过程的噪声协方差。可以对K进行定性分析:
★ 如果测量非常精准,测量误差趋近于0,R趋近于0,那么上边分式简化以后右侧只剩一个
,即:
★ 如果预测非常精准,预测误差趋近于0,
趋近于0,那么K就应该为0,不用考虑测量结果:
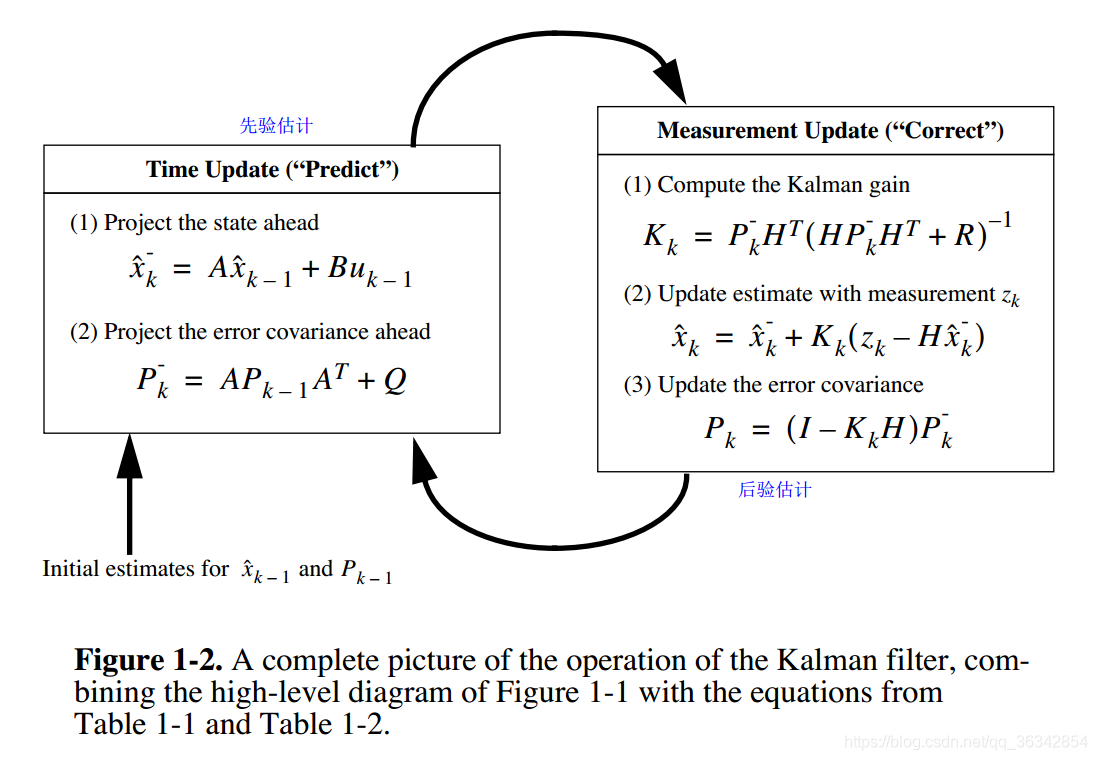
四、离散KF算法(Discrete Kalman Filter Algorithm)
Kalman Filter在某一时刻进行状态的预测,并且得到这一时刻的噪声测量反馈。因此,Kalman Filter组:可以分为两个组:time update 和 measurement update。前者负责向前推进状态和误差协方差的估计来获得先验估计。后者负责反馈,对测量结果和先验估计进行联合,得到后验估计。或者称为:predictor equations 和 corrector equations

两个阶段的公式如下:


更新过程就是这样:
五、Kalman Filter 的 C++实现(基于OpenCV)
本程序共有两路轨迹:自动生成的直线轨迹 和 实时鼠标数据。

#include "opencv2/video/tracking.hpp"
#include "opencv2/highgui/highgui.hpp"
#include <stdio.h>
#include <iostream>
using namespace cv;
using namespace std;
const int winHeight = 700;
const int winWidth = 1200;
KalmanFilter CreateKF(double sys_noise);
Point Kalman_Predict(KalmanFilter KF);
Point mousePosition = Point(winWidth >> 1, winHeight >> 1);
bool Match_straegy_bin(Point pridict_1, Point pridict_2, Mat measurement_A, Mat measurement_B);
//mouse event callback
void mouseEvent(int event, int x, int y, int flags, void *param)
{
if (event == CV_EVENT_MOUSEMOVE) {
mousePosition = Point(x, y);
}
}
int main(void)
{
int i = 0;
const int measureNum = 2;
Point track[2][5000];
Point predict_pt, predict_pt_1; // 预测用的点
KalmanFilter KF = CreateKF(1e-5); // 创建一个Kalman Filter
KalmanFilter KF_1 = CreateKF(1e-6);
// 生成假数据
Point data[2][800];
for (int i = 0; i < 800; i++)
data[0][i] = Point(i + 50, 200);
for (int j = 0; j < 800; j++)
data[1][j] = Point(j + 50, 200);
//初始测量值x'(0),因为后面要更新这个值,所以必须先定义
Mat measurement_A = Mat::zeros(measureNum, 1, CV_32F);
Mat measurement_B = Mat::zeros(measureNum, 1, CV_32F);
// 新建一个窗口界面
namedWindow("kalman");
setMouseCallback("kalman", mouseEvent);
Mat image(winHeight, winWidth, CV_8UC3, Scalar(0));
for(int k=100;k<500;k++)
{
//1.kalman prediction
predict_pt = Kalman_Predict(KF);
predict_pt_1 = Kalman_Predict(KF_1);
//2.update measurement
//顺序版本的数据
measurement_A.at<float>(0) = data[0][k].x;
measurement_A.at<float>(1) = data[0][k].y;
//鼠标+规整数据
measurement_B.at<float>(0) = (float)mousePosition.x;
measurement_B.at<float>(1) = (float)mousePosition.y;
//使用匹配策略
bool match_1_A = Match_straegy_bin(predict_pt, predict_pt_1, measurement_A, measurement_B);
if (match_1_A)
{
KF.correct(measurement_A);
KF_1.correct(measurement_B);
}
else
{
KF.correct(measurement_B);
KF_1.correct(measurement_A);
}
//draw
image.setTo(Scalar(255, 255, 255, 0));
circle(image, predict_pt, 5, Scalar(0, 255, 0), 3); //predicted point with green
circle(image, predict_pt_1, 5, Scalar(0, 0, 255), 3); //predicted point with green
circle(image, mousePosition, 5, Scalar(255, 0, 0), 3); //current position with red
track[0][i] = predict_pt;
track[1][i] = predict_pt_1;
// 绘制轨迹
for (int j = 0; j < i; j++)
{
circle(image, track[0][j], 3, Scalar(0, 0, 0), 1);
circle(image, track[1][j], 3, Scalar(225, 225, 0), 1);
}
i = i + 1;
char buf[256];
sprintf_s(buf, 256, "predicted position:(%3d,%3d)", predict_pt.x, predict_pt.y);
putText(image, buf, Point(10, 30), CV_FONT_HERSHEY_SCRIPT_COMPLEX, 1, Scalar(0, 0, 0), 1, 8);
sprintf_s(buf, 256, "current position :(%3d,%3d)", mousePosition.x, mousePosition.y);
putText(image, buf, cvPoint(10, 60), CV_FONT_HERSHEY_SCRIPT_COMPLEX, 1, Scalar(0, 0, 0), 1, 8);
imshow("kalman", image);
int key = waitKey(3);
if (key == 27) {//esc
break;
}
}
return 0;
}
KalmanFilter CreateKF(double sys_noise) // 创建一个Kalman滤波器
{
RNG rng;
//1.kalman filter setup
const int stateNum = 4; //状态值4×1向量(x,y,△x,△y)
const int measureNum = 2; //测量值2×1向量(x,y)
KalmanFilter KF(stateNum, measureNum, 0); // 构建卡尔曼滤波器模型
KF.transitionMatrix = (Mat_<float>(4, 4) << 1, 0, 1, 0, 0, 1, 0, 1, 0, 0, 1, 0, 0, 0, 0, 1); //转移矩阵A
setIdentity(KF.measurementMatrix); //测量矩阵H
setIdentity(KF.processNoiseCov, Scalar::all(sys_noise)); //系统噪声方差矩阵Q 1e-5
setIdentity(KF.measurementNoiseCov, Scalar::all(1e-1)); //测量噪声方差矩阵R
setIdentity(KF.errorCovPost, Scalar::all(1)); //后验错误估计协方差矩阵P
rng.fill(KF.statePost, RNG::UNIFORM, 0, winHeight > winWidth ? winWidth : winHeight); //初始状态值x(0)
return KF;
}
Point Kalman_Predict(KalmanFilter KF)
{
Mat prediction = KF.predict();
Point predict_pt = Point(prediction.at<float>(0), prediction.at<float>(1)); //预测值(x',y')
return predict_pt;
}
bool Match_straegy_bin(Point pridict_1, Point pridict_2, Mat measurement_A, Mat measurement_B)
{
//检验预测1和A是否匹配
double delt_1, delt_2;
delt_1 = sqrt(pow((measurement_A.at<float>(0) - pridict_1.x), 2) + pow((measurement_A.at<float>(1) - pridict_1.y), 2));
delt_2 = sqrt(pow((measurement_B.at<float>(0) - pridict_1.x), 2) + pow((measurement_B.at<float>(1) - pridict_1.y), 2));
if (delt_1 < delt_2)
return true;
else
return false;
}
