Learning Kalman filter
by luoshi006
参考:A practical approach to Kalman filter and how to implement it、 Kalman filter wikiPedia
参考 PX4 中 EKF 的matlab实现,并将代码注释于第6节。
1、 introduction
http://mathworld.wolfram.com/KalmanFilter.html
2、 预备知识
3、 定义
卡尔曼滤波器,是一种高效的递归滤波器,其输入是一组随时间变化观测到的数值序列(如:加速度计、陀螺仪),这些观测值 包含噪声。卡尔曼滤波器基于当前和前一时刻的状态,估计出更为精确的系统状态。
这种滤波方法以它的发明者鲁道夫.E.卡尔曼(Rudolph E. Kalman)命名。
4、 噪声来源
加速度计:
当机器人往复运动时,测量的重力加速度会有很多噪声。
陀螺仪:
它随着时间漂移。(就像旋转的陀螺失速时,转轴指向无法维持)【这个栗子(+﹏+)~】
简单说来,就是短时间内,陀螺仪的数据可信度高;长时间以后,加速度计的数据可信度高。
互补滤波
这种情况下,互补滤波器是种比较简单的处理方法。基本原理就是:对加速度计的数据低通滤波,对陀螺仪的数据高通滤波。它没有卡尔曼滤波器准确,但经过调节,也能够简单使用。
互补滤波器和卡尔曼滤波器的对比:
参考: blog
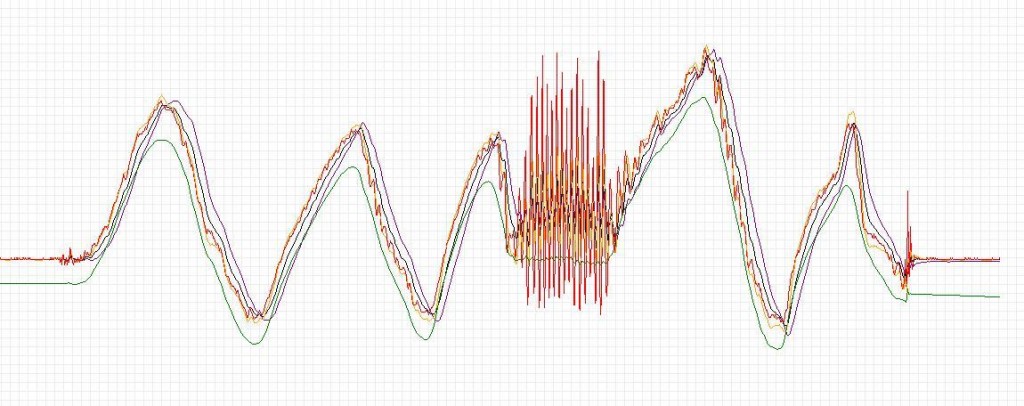
图中:
红色:加速度计;绿色:陀螺仪;蓝色:卡尔曼滤波;黑色:互补滤波;黄色:二阶互补滤波;
可以看到,由于振动的影响,加速度计已被振傻,而陀螺仪的数据越来越飘~
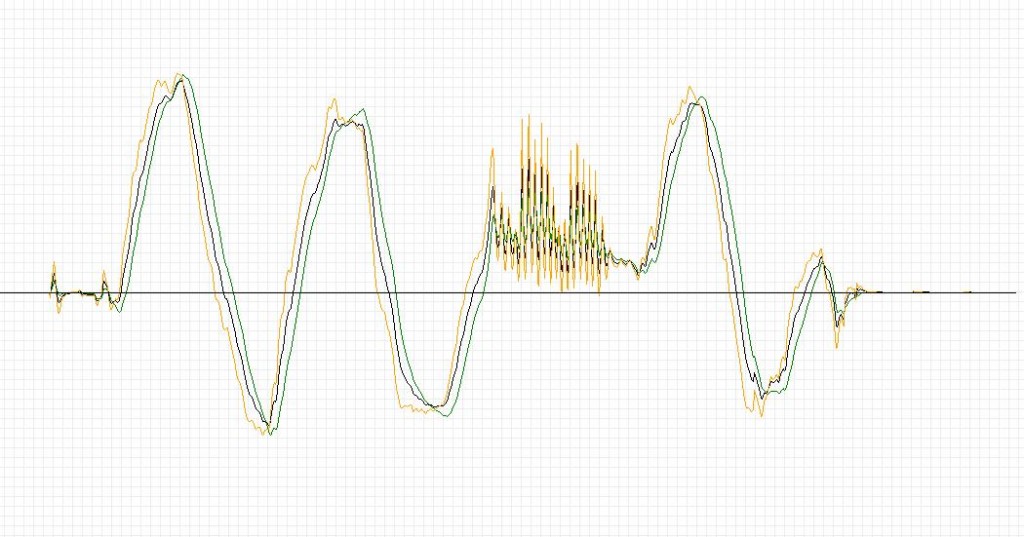
图中:
绿色:卡尔曼;黑色:互补滤波;黄色:二阶互补滤波;
卡尔曼滤波比互补滤波多了延时,但更适应振动。二阶互补滤波曲线不理想,可能是参数的问题。
5、 符号定义
卡尔曼滤波是对观测量的最优估计。首先,它需要知道观测器的测量噪声(measurement noise)和系统的过程噪声(process noise)。这些噪声必须是高斯分布,且均值为零。幸运的是,大部分随机噪声都有这些特性。
更多卡尔曼滤波信息:
5.1 系统状态
文中使用的符号沿用wikiPedia Kalman filter。
其中,常数矩阵(与时间无关),不需要标下标
。即,
表示为
。
另外,还有一些记号表示的解释:
- 上一时刻状态(previous state)
表示: 时刻,状态的最优估计
- 预测状态(先验状态)(priori state)
表示: 时刻,状态的最优预测;由之前的状态和估计得到当前 时刻的状态矩阵估计值。
- 校正状态(后验状态)(posteriori state)
表示: 时刻,状态的最优估计;由 时刻的观测值校正后的最优估计。
提出问题:系统状态不能直接得到,只能通过观测值
得到。称为:隐马儿可夫模型Hidden Markov model
这就意味着,系统状态只能由当前时刻观测值和之前所有的观测状态得到。同时,在卡尔曼滤波稳定之前,得到的状态估计是不可信的。
表示状态的估计值;
表示状态的真实值(希望得到的值);
故:
时刻状态表示为:
时刻的系统状态由该式给出:
是状态矩阵:
所以,滤波器的输出是角度 和偏差 。偏差为陀螺仪的偏移量。所以,有陀螺仪的测量值减去该偏差,就得到真是的速度值。
矩阵,状态转换模型,用于上一时刻状态:
是系统输入。本文中,它表示陀螺仪在 时刻的读数(单位:°/s),也被称为角速度 。
- 系统状态可重写为:
其中,矩阵 为控制/输入矩阵,定义为:
矩阵 中的 乘以角速度 可以得到角度 。但是,偏差(bias)无法直接由角速度计算得到,所以矩阵 底部元素设为0.
- 是过程噪声,均值为0的高斯分布,协方差 与时间 相关:
其中,
是过程噪声的协方差矩阵。在本文中,表示为加速度计和偏差的状态估计的协方差矩阵。本文认为偏差和加速度计的估计是独立的,所以,协方差等于加速度计和偏差的方差的乘积。
最终得到:
可以看出,
协方差矩阵随时间变化,所以,加速度计方差
和偏差的方差
需要乘以时间变化量
。
所以,距离上一次状态更新的时间越长,过程噪声会越大。例如:陀螺仪的漂移。【??? 存疑,待修正】。
必须知道卡尔曼滤波运行所需要的常数(值越大,状态估计的噪声越大):
例如,如果估计的角度开始漂移,就必须增大
的值。如果状态变化较慢,角度的估计更加可信,应该减小
,增大加速度计可信度。
5.2 观测值
现在开始考虑真实状态
的观测值
。
观测方程由下式给出:
式中,观测值
由当前状态
乘以矩阵
,再加上测量噪声
。
矩阵
是观测模型,用于将真实的状态映射到观测空间。因为,真实状态是不可直接获取的,测量值是加速度计的读数(加速度角度),
测量噪声 认为是高斯分布(正态分布),期望为0,协方差为 :
以下部分待验证
相同变量的协方差等于其方差,当 不是矩阵时,就等于测量值的方差。详情参见 协方差矩阵的符号分歧。定义 :
假设测量噪声不随时间变化:
需要注意的是,如果将测量噪声值 设的太高,滤波器响应时间会变慢,因为新的测量值可信度较低;如果设的太低,可能会造成超调,引入大量噪声,因为此时加速度计可信度较高。
所以,找到过程噪声方差 、 和测量噪声 十分重要。方法较多,另行开盘。。。
5.3 AttitudeEKF.m
以 px4 中的 EKF 代码为例。(该部分代码有matlab生成,在新版中已删除)
function [xa_apo,Pa_apo,Rot_matrix,eulerAngles,debugOutput]...
= AttitudeEKF(approx_prediction,use_inertia_matrix,zFlag,dt,z,q_rotSpeed,q_rotAcc,q_acc,q_mag,r_gyro,r_accel,r_mag,J)
%LQG Position Estimator and Controller
% Observer:
% x[n|n] = x[n|n-1] + M(y[n] - Cx[n|n-1] - Du[n])
% x[n+1|n] = Ax[n|n] + Bu[n]
%
% $Author: Tobias Naegeli $ $Date: 2014 $ $Revision: 3 $
%
%
% Arguments:
% approx_prediction: if 1 then the exponential map is approximated with a
% first order taylor approximation. has at the moment not a big influence
% (just 1st or 2nd order approximation) we should change it to rodriquez
% approximation.
% 预测近似方式,1 -- 一阶泰勒展开,
% use_inertia_matrix: set to true if you have the inertia matrix J for your
% quadrotor
% 是否使用转动惯量矩阵;
% xa_apo_k: old state vectotr
% 之前状态向量
% zFlag: if sensor measurement is available [gyro, acc, mag]
% 传感器信号可用(测量值)
% dt: dt in s 秒
% z: measurements [gyro, acc, mag]
% 测量值
% q_rotSpeed: process noise gyro
% 陀螺仪角速度 过程噪声 Q
% q_rotAcc: process noise gyro acceleration
% 陀螺仪角加速度 过程噪声 Q
% q_acc: process noise acceleration
% 加速度 过程噪声 Q
% q_mag: process noise magnetometer
% 磁力计 过程噪声 Q
% r_gyro: measurement noise gyro
% 陀螺仪 测量噪声 R
% r_accel: measurement noise accel
% 加速度计 测量噪声 R
% r_mag: measurement noise mag
% 磁力计 测量噪声 R
% J: moment of inertia matrix
% 惯性矩,惯性积?
% Output:
% xa_apo: updated state vectotr
% 状态向量
% Pa_apo: updated state covariance matrix
% 状态协方差
% Rot_matrix: rotation matrix
% 旋转矩阵
% eulerAngles: euler angles
% 欧拉角
% debugOutput: not used 调试用;
%% model specific parameters
初始化变量:
% compute once the inverse of the Inertia
% persistent 申明静态变量;
persistent Ji;
if isempty(Ji)
Ji=single(inv(J));
end
%% init
% 起飞时的初始值;
persistent x_apo
if(isempty(x_apo))
gyro_init=single([0;0;0]);
gyro_acc_init=single([0;0;0]);
acc_init=single([0;0;-9.81]);
mag_init=single([1;0;0]);
% NED 中指北;
x_apo=single([gyro_init;gyro_acc_init;acc_init;mag_init]);
% single 转换为单精度;
end
persistent P_apo
if(isempty(P_apo))
% P_apo = single(eye(NSTATES) * 1000);
P_apo = single(200*ones(12));
% 200 表示 P 协方差很大,数据可信度低;
end
debugOutput = single(zeros(4,1));
%% copy the states
wx= x_apo(1); % x body angular rate
wy= x_apo(2); % y body angular rate
wz= x_apo(3); % z body angular rate
wax= x_apo(4); % x body angular acceleration
way= x_apo(5); % y body angular acceleration
waz= x_apo(6); % z body angular acceleration
zex= x_apo(7); % x component gravity vector
zey= x_apo(8); % y component gravity vector
zez= x_apo(9); % z component gravity vector
mux= x_apo(10); % x component magnetic field vector
muy= x_apo(11); % y component magnetic field vector
muz= x_apo(12); % z component magnetic field vector
6、 卡尔曼滤波器
卡尔曼滤波器,主要用于估计当前时刻 的系统状态。主要分为预测、校正两步。
6.1 预测
状态预测
滤波器通过先前状态和陀螺仪的测量值,预测当前的状态。得到预测状态(先验状态priori state)
%% prediction section
% compute the apriori state estimate from the previous aposteriori estimate
%body angular accelerations
if (use_inertia_matrix==1)
wak =[wax;way;waz]+Ji*(-cross([wax;way;waz],J*[wax;way;waz]))*dt;
else
wak =[wax;way;waz];
end
%body angular rates
% 更新 角速度;
wk =[wx; wy; wz] + dt*wak;
%derivative of the prediction rotation matrix
% 更新后的旋转矩阵 求导;
O=[0,-wz,wy;wz,0,-wx;-wy,wx,0]';
%prediction of the earth z vector
% 更新 加速度计 向量
% 任何旋转向量都可以表示为斜对称矩阵 O 的指数
% 这里的指数是以泰勒级数定义的矩阵乘法。O 矩阵叫做旋转的“生成元”
% 此部分概念请参考 【李代数】。
if (approx_prediction==1)
%e^(Odt)=I+dt*O+dt^2/2!O^2
% so we do a first order approximation of the exponential map
zek =(O*dt+single(eye(3)))*[zex;zey;zez];
else
zek =(single(eye(3))+O*dt+dt^2/2*O^2)*[zex;zey;zez];
%zek =expm2(O*dt)*[zex;zey;zez]; not working because use double
%precision
end
%prediction of the magnetic vector
if (approx_prediction==1)
%e^(Odt)=I+dt*O+dt^2/2!O^2
% so we do a first order approximation of the exponential map
muk =(O*dt+single(eye(3)))*[mux;muy;muz];
else
muk =(single(eye(3))+O*dt+dt^2/2*O^2)*[mux;muy;muz];
%muk =expm2(O*dt)*[mux;muy;muz]; not working because use double
%precision
end
% 预测状态:
x_apr=[wk;wak;zek;muk];
误差协方差预测
根据先前的误差协方差矩阵 ,预测当前的先验误差协方差矩阵 :
该矩阵用于估计当前状态估计的可信度。值越小,当前状态估计的可信度越高。
由上式可知,如果不进行校正(更新),误差协方差会一直累积。
% compute the apriori error covariance estimate from the previous
%aposteriori estimate
EZ=[0,zez,-zey;
-zez,0,zex;
zey,-zex,0]';
MA=[0,muz,-muy;
-muz,0,mux;
muy,-mux,0]';
E=single(eye(3));
Z=single(zeros(3));
% 根据 状态向量 求出;
A_lin=[ Z, E, Z, Z
Z, Z, Z, Z
EZ, Z, O, Z
MA, Z, Z, O];
A_lin=eye(12)+A_lin*dt;
%process covariance matrix
persistent Q
if (isempty(Q))
Q=diag([ q_rotSpeed,q_rotSpeed,q_rotSpeed,...
q_rotAcc,q_rotAcc,q_rotAcc,...
q_acc,q_acc,q_acc,...
q_mag,q_mag,q_mag]);
end
P_apr=A_lin*P_apo*A_lin'+Q;
6.2 校正
新息
首先,由当前的观测值
和预测状态
计算出新息:
观测阵 用于将预测状态 映射到观测空间(加速度计观测);
新息是向量形式【?】:
%% update
if zFlag(1)==1&&zFlag(2)==1&&zFlag(3)==1
% R=[r_gyro,0,0,0,0,0,0,0,0;
% 0,r_gyro,0,0,0,0,0,0,0;
% 0,0,r_gyro,0,0,0,0,0,0;
% 0,0,0,r_accel,0,0,0,0,0;
% 0,0,0,0,r_accel,0,0,0,0;
% 0,0,0,0,0,r_accel,0,0,0;
% 0,0,0,0,0,0,r_mag,0,0;
% 0,0,0,0,0,0,0,r_mag,0;
% 0,0,0,0,0,0,0,0,r_mag];
R_v=[r_gyro,r_gyro,r_gyro,r_accel,r_accel,r_accel,r_mag,r_mag,r_mag];
%observation matrix
%[zw;ze;zmk];
H_k=[ E, Z, Z, Z;
Z, Z, E, Z;
Z, Z, Z, E];
y_k=z(1:9)-H_k*x_apr;
新息协方差:
式中:观测阵
用于将误差协方差预测矩阵
映射到观测空间;
该式根据误差协方差预测矩阵
和测量协方差矩阵
估计出观测值的可信度。测量噪声越大,
的值越大。即,当前测量值可信度较低。
本文中, 是向量:
卡尔曼增益
卡尔曼增益用于表征新息的可信度。
可以得出,若新息可信度低,新息协方差
较大;状态估计可信度高,误差协方差矩阵
较小,此时,卡尔曼增益
较小。反之,同理。
式中,观测阵
的转置用于将误差协方差矩阵
映射到观测空间。
启动时不知道状态,可以将误差协方差矩阵设为:
若启动状态完全已知,且陀螺仪已校准,可将误差协方差矩阵初始化为零阵。
本文中,卡尔曼增益为2*1的矩阵:
%S_k=H_k*P_apr*H_k'+R;
S_k=H_k*P_apr*H_k';
S_k(1:9+1:end) = S_k(1:9+1:end) + R_v;
K_k=(P_apr*H_k'/(S_k));
校正
式中,新息 为观测值 和预测状态 的差,所以,正负均有可能。
式中: 为单位矩阵。
滤波器根据当前状态估计的可信度,修正误差协方差矩阵。使得可以由误差协方差预测矩阵 和新息协方差 得到系统状态。
x_apo=x_apr+K_k*y_k;
P_apo=(eye(12)-K_k*H_k)*P_apr;
7、 参考文献中 Implement
A practical approach to Kalman filter and how to implement it
该部分的 C 代码,需根据实际系统修改。
step 1:
rate = newRate - bias;
angle += dt * rate;step 2:
P[0][0] += dt * (dt*P[1][1] - P[0][1] - P[1][0] + Q_angle);
P[0][1] -= dt * P[1][1];
P[1][0] -= dt * P[1][1];
P[1][1] += Q_gyroBias * dt;step 3:
y = newAngle - angle;step 4:
S = P[0][0] + R_measure;step 5:
注意:此处 是标量,但 可以是矩阵,此时,需要计算矩阵的逆。
K[0] = P[0][0] / S;
K[1] = P[1][0] / S;step 6:
angle += K[0] * y;
bias += K[1] * y;step 7:
float P00_temp = P[0][0];
float P01_temp = P[0][1];
P[0][0] -= K[0] * P00_temp;
P[0][1] -= K[0] * P01_temp;
P[1][0] -= K[1] * P00_temp;
P[1][1] -= K[1] * P01_temp;一些建议参数:
float Q_angle = 0.001;
float Q_gyroBias = 0.003;
float R_measure = 0.03;注意事项:
- 如果要求滤波器启动时输出有意义,需要给定初试状态;
未完待续。。。。