作者:程序媛的爱码记
生活中人们有个认识,照相的时候总是觉得 :只要相机离脸足够的远 ,那么脸就可以无限的变小。
这可以用初中物理学中的凸透镜成像规律来解释:



我们知道 ,凸透镜对光线有会聚的作用 ,当一束平行光沿凸透镜主光轴照射过来时通过透镜之后,会在另一侧被会聚于一点,这一点叫做该透镜的焦点F。焦点到透镜中心的距离叫焦距f。
1.眼睛就像两只单反plus

2.什么是双目立体视觉


亲眼所见并非真相? 融合两只眼睛获得的图像并观察他们之间的差别,使我们可以获得明显的深度感,建立特征间的对应关系,将同一空间物理点在不同图像中的映射点对应起来,这个差别,我们称作视差;如图2D图像中所示,绿怪物的脚趾至图像左边缘距离的差值就是视差,对于视差的理解自己可以体验一下:将手指头放在离眼睛不同距离的位置,并轮换睁、闭左右眼,可以发现手指在不同距离的位置,视觉差也不同,且距离越近,视差越大。
双目立体视觉是指同时使用双眼并对落在双眼各自视网膜上的像产生最终像的识别。是一种组织性的视觉功能,又两个眼睛分别将物像在各自眼别上聚焦成像,经过共同协调的行为与大脑视觉系统的整合作用。完成双眼视觉的功能
在双目视觉测量中,图像匹配的目的是给定一幅图像上的已知点或源匹配点后,在另一幅图像上寻找与之对应的目标匹配点。
3.如何计算物理世界的三维坐标
P点是物理世界的一个点。
相片1是左摄像机的照片;相片2是右摄像机的照片。P点在两个相片的位置分别是X和X’,X和X’的差值就是视差。双目算法,根据视差,两个摄像机之间的距离和镜头的焦距就可以得到P的Z值。再根据Z值就可以计算其X,Y值,得到P点的三维坐标。对于计算机而言,计算机如何知道X和X’对应同一个P点呢?计算机需要用到图像匹配算法,先获取X在相片1的特征,然后再相片2中搜索这个特征,找到X’。如果相片2中的很多点有相似的特性,就有可能匹配错误,得到错误的三维坐标

4.单目结构光
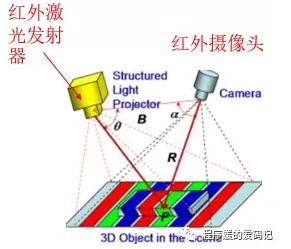
双目立体视觉原理讲了,如果相片1和相片2中的几个物理点,特征都相同,则会计算错误。例如,一片白墙,墙面没有任何特点,双目视觉算法无法获取白墙的三维坐标,如何解决这个问题呢?这就是结构光的原理。结构光由一个红外激光发射器和一个红外摄像头组成。激光发射器发送红外信息,例如投射到一片白墙上,相当于给白墙重新编码,白墙上的每个点都有自己的特征。红外摄像头获取带特征点的白墙。结构光算法通过这些特征点,进行匹配,计算每个点的物理坐标。

双眼视觉的优点,是可以弥补单眼视野中的盲区缺损,扩大视野,并产生立体视觉。也就是说,假如只有一只眼睛,失去立体视觉后,人判断距离的能力将会下降。这也就是单目失明的人不能考取驾照的原因。人在只有一只眼睛的情况下,较难分辨长度、大小这些数据,开车的话就容易出意外。摄像头如同是人眼的仿生设备,当有两个摄像头的时候,我们可以通过计算得到长度数据。

结构光算法能够解决双目匹配算法的准确性和精度问题,不依赖于物体本身的颜色和纹理,采用主动投影已知图案的方法来实现快速匹配,达到较高的精度,也大大扩展了适用范围。
结构光只有一个红外摄像头,所以只有一张相片。(不管是双目还是结构光,彩色摄像头用于获取物体彩色信息,和3D技术无关)
激光Laser与摄像头在同一水平线(称为基准线)上,其距离为s,摄像头焦距为f,激光头与基准线的夹角为β。假设目标物体Object在点状激光器的照射下,反射回摄像头成像平面(相片)的位置为点P。
这个相片里的每个点都有特征(激光投射过去的)。结构光算法内置每个特征对应的距离,所以,算法首先根据相片中每个点的特征,和内置的数据去匹配,然后根据摄像头与激光发射器之间的距离,镜头的焦距,计算物体Objet到基准线的q值,再计算X和Y,得到三维坐标。
5.TOF相机是什么
 :TOF是Time of flight的简写,直译是飞行时间的意思。所谓飞行时间法3D成像,直白来说,是通过给目标连续发送光脉冲,然后用传感器接收从物体返回的光,通过探测光脉冲的飞行(往返)时间来得到目标物距离。
:TOF是Time of flight的简写,直译是飞行时间的意思。所谓飞行时间法3D成像,直白来说,是通过给目标连续发送光脉冲,然后用传感器接收从物体返回的光,通过探测光脉冲的飞行(往返)时间来得到目标物距离。
举个例子,现在我们有一个光源手电筒,假设在月球上放置一个镜子,我们按开手电筒开关的同时按下秒表开始计时,等我们看到月球上的镜子里的光线时,再按下秒表结束计时。秒表上的时间就是光往返地球和月球的时间,我们又知道光的速度:299792458 m/s,1光年=945425495.5488万千米(公里),那么月球到地球的距离我们很容易就计算出来了。
-----END----

