文章目录
1. 为什么需要RNN?
一般处理单个的输入,前一个输入和后一个输入完全无关,但实际应用中,某些任务需要能够更好的处理序列的信息,即前面的输入和后面的输入是有关系的。比如:时间序列问题
2. 简要介绍RNN的基本结构
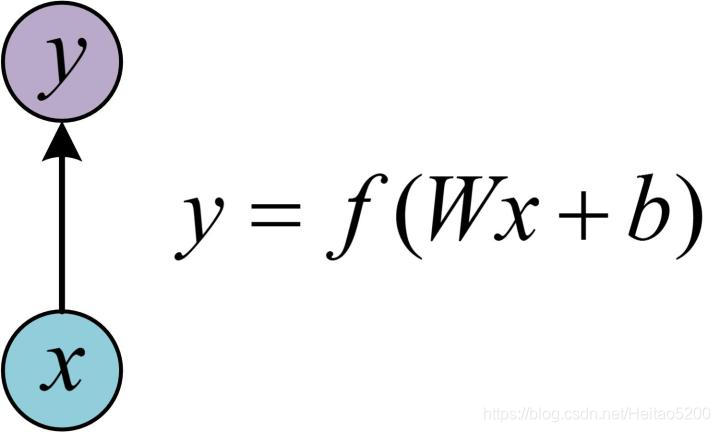
单层网络结构
在进一步了解RNN之前,先给出最基本的单层网络结构,输入是 ,经过变换 和激活函数 得到输出 :
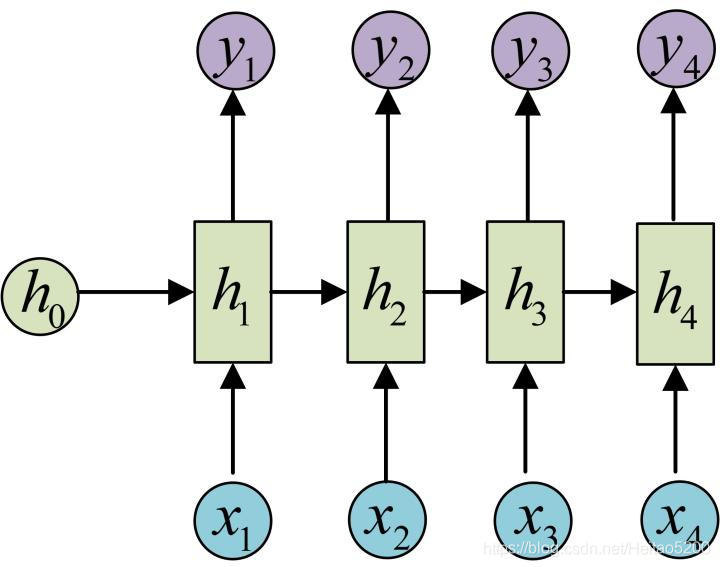
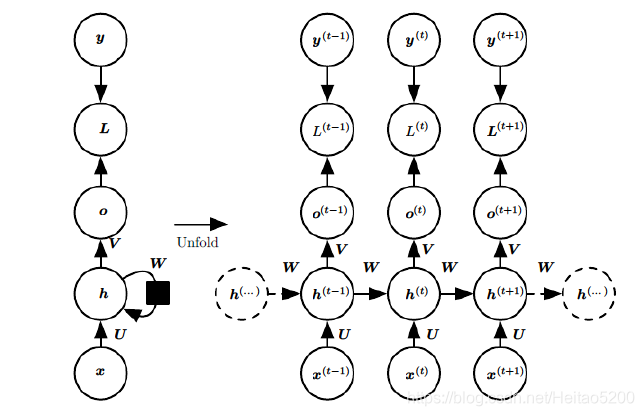
经典RNN结构
RNN在单层网络结构的基础上引入了隐藏层 , 可对序列数据提取特征,接着再转换为输出。
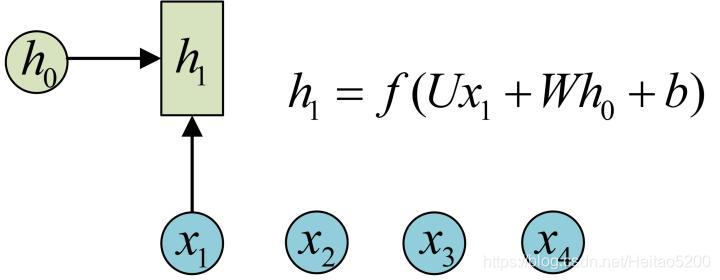
注:图中的圆圈表示向量,箭头表示对向量做变换。
RNN中,每个步骤权值共享,使用的参数 相同, 的计算方式和 类似,其计算结果如下:
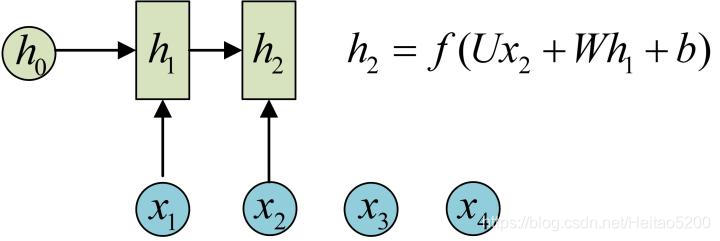
接下来,计算RNN的输出 ,采用 作为激活函数,根据 ,得 :
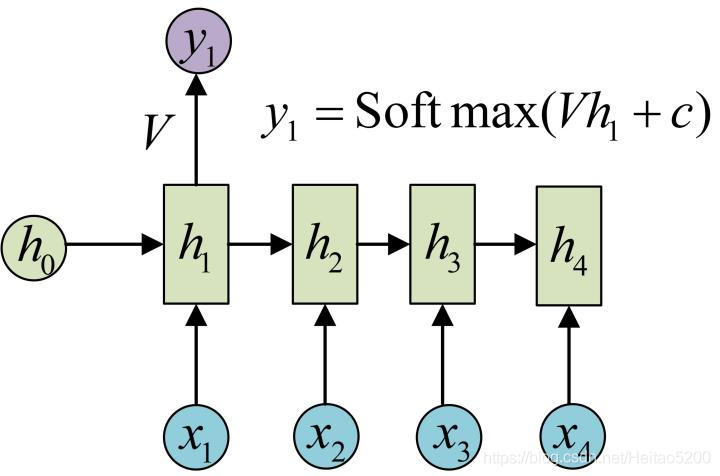
使用和 相同的参数 ,得到 的输出结构:
RNN的拓展结构
| 网络结构 | 结构图示 | 应用场景举例 |
|---|---|---|
| 1 vs N | 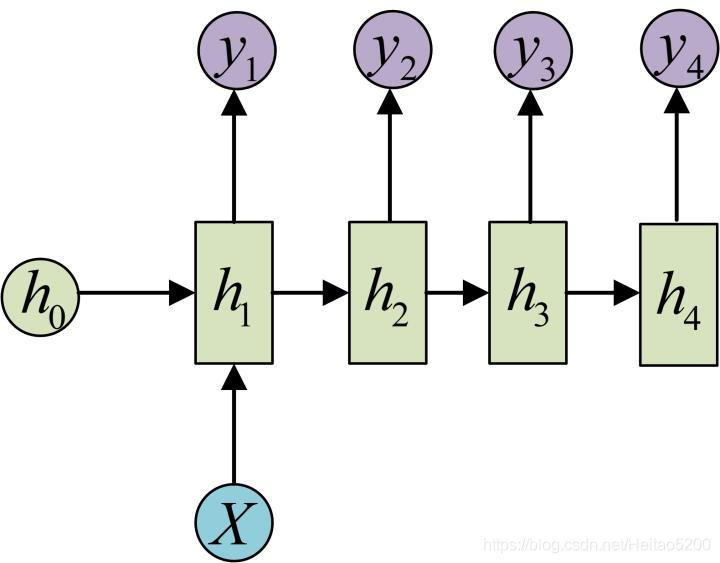 |
1、从图像生成文字,输入为图像的特征,输出为一段句子 2、根据图像生成语音或音乐,输入为图像特征,输出为一段语音或音乐 |
| N vs 1 | 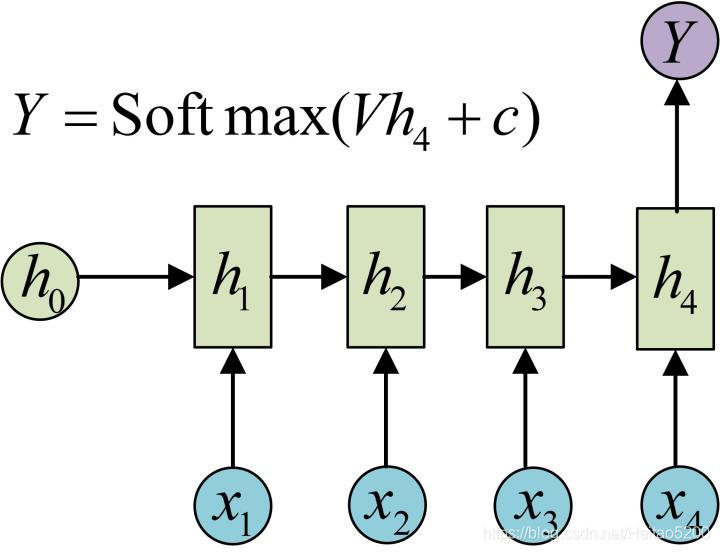 |
1、输出一段文字,判断其所属类别 2、输入一个句子,判断其情感倾向 3、输入一段视频,判断其所属类别 |
| N vs M | 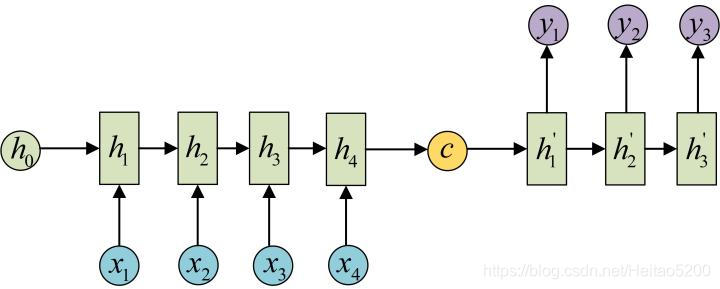 |
1、机器翻译,输入一种语言文本序列,输出另外一种语言的文本序列 2、文本摘要,输入文本序列,输出这段文本序列摘要 3、阅读理解,输入文章,输出问题答案 4、语音识别,输入语音序列信息,输出文字序列 |
3. CNN和RNN的区别 ?
| 类别 | 特点描述 |
|---|---|
| 相同点 | 1、传统神经网络的扩展。 2、前向计算产生结果,反向计算模型更新。 3、每层神经网络横向可以多个神经元共存,纵向可以有多层神经网络连接。 |
| 不同点 | 1、CNN空间扩展,神经元与特征卷积;RNN时间扩展,神经元与多个时间输出计算 2、RNN可以用于描述时间上连续状态的输出,有记忆功能,CNN用于静态输出 |
4. RNNs和FNNs(前馈神经网络)有什么区别?
- RNNs引入了定向循环,能够处理输入之间前后关联问题。
- RNNs可以记忆之前步骤的训练信息。
5. RNNs训练和传统ANN训练异同点?
相同点:
- RNNs与传统ANN都使用BP误差反向传播算法。
不同点:
- RNNs网络参数W,U,V是共享的,而传统神经网络各层参数间没有直接联系。
- 对于RNNs,在使用梯度下降算法中,每一步的输出不仅依赖当前步的网络,还依赖于之前若干步的网络状态。
6. 为什么RNN 训练的时候Loss波动很大
由于RNN特有的memory会影响后期其他的RNN的特点,梯度时大时小,learning rate没法个性化的调整,导致RNN在train的过程中,Loss会震荡起伏。为了解决RNN的这个问题,在训练的时候,可以设置临界值,当梯度大于某个临界值,直接截断,用这个临界值作为梯度的大小,防止大幅震荡。
7. 描述RNN的前向输出流程
以 表示输入, 是隐层单元, 是输出, 为损失函数, 为训练集标签。 表示 时刻的状态, 是权值,同一类型的连接权值相同。以下图为例进行说明标准RNN的前向传播算法:
对于
时刻:
其中
为激活函数,一般会选择tanh函数,
为偏置。
时刻的输出为:
模型的预测输出为:
其中
为激活函数,通常RNN用于分类,故这里一般用softmax函数。
8. RNN中为什么会出现梯度消失,如何解决?
原因
- RNN在算是会有激活函数导数的累乘,如果取tanh或sigmoid函数作为激活函数的话,那么必然是一堆小数在做乘法,结果就是越乘越小。随着时间序列的不断深入,小数的累乘就会导致梯度越来越小直到接近于0,这就是“梯度消失“现象。
如何解决
- 选取更好的激活函数,如Relu激活函数。ReLU函数的左侧导数为0,右侧导数恒为1,这就避免了“梯度消失“的发生。但恒为1的导数容易导致“梯度爆炸“,但设定合适的阈值可以解决这个问题。
- 加入BN层,其优点包括可加速收敛、控制过拟合,可以少用或不用Dropout和正则、降低网络对初始化权重不敏感,且能允许使用较大的学习率等。
- 改变传播结构,LSTM结构可以有效解决这个问题。下面将介绍LSTM相关内容。
9. LSTM核心思想图解
LSTM 拥有三个门,分别是遗忘门,输入门和输出门,来保护和控制细胞状态。
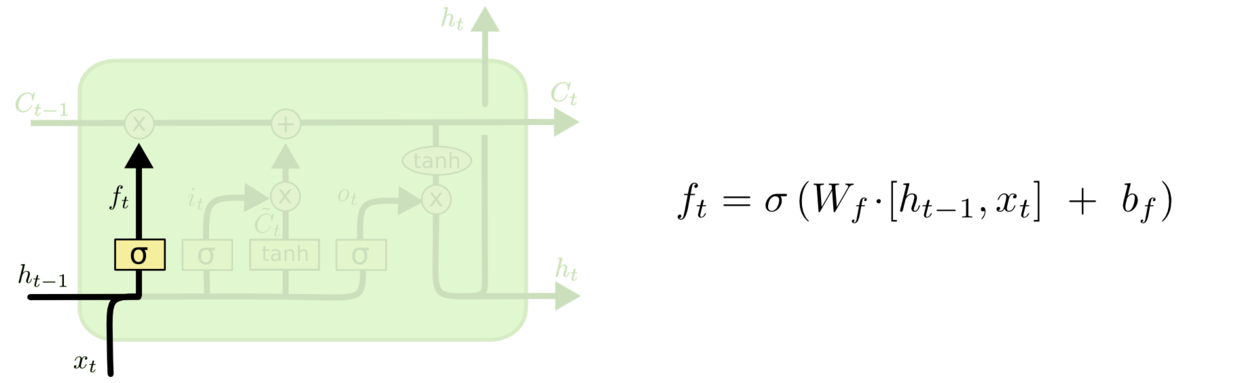
忘记门
-
作用对象:细胞状态 。
-
作用:将细胞状态中的信息选择性的遗忘。
-
操作步骤:该门会读取 和 ,输出一个在 0 到 1 之间的数值给每个在细胞状态 中的数字。1 表示“完全保留”,0 表示“完全舍弃”。
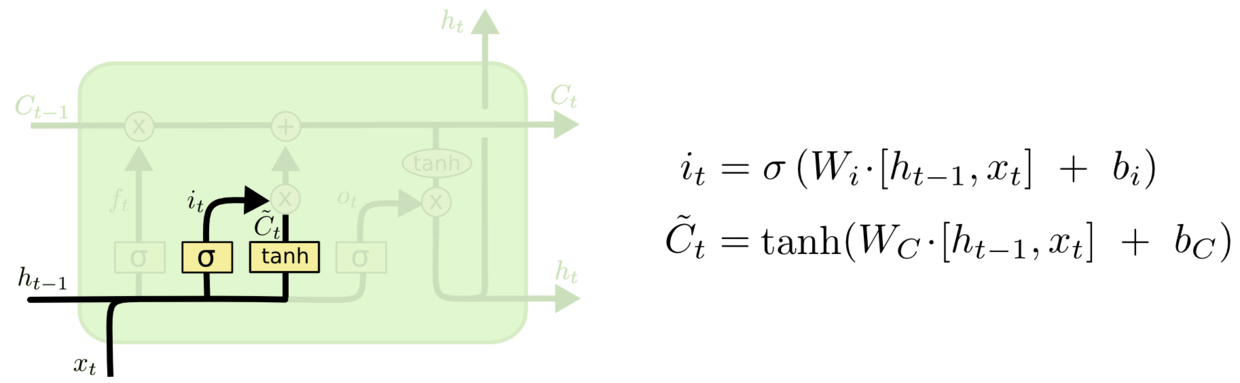
输入门
-
作用对象:细胞状态
-
作用:将新的信息选择性的记录到细胞状态中。
-
操作步骤:
-
sigmoid 层称 “输入门” 决定什么值我们将要更新。
-
tanh 层创建一个新的候选值向量 加入到状态中。
-
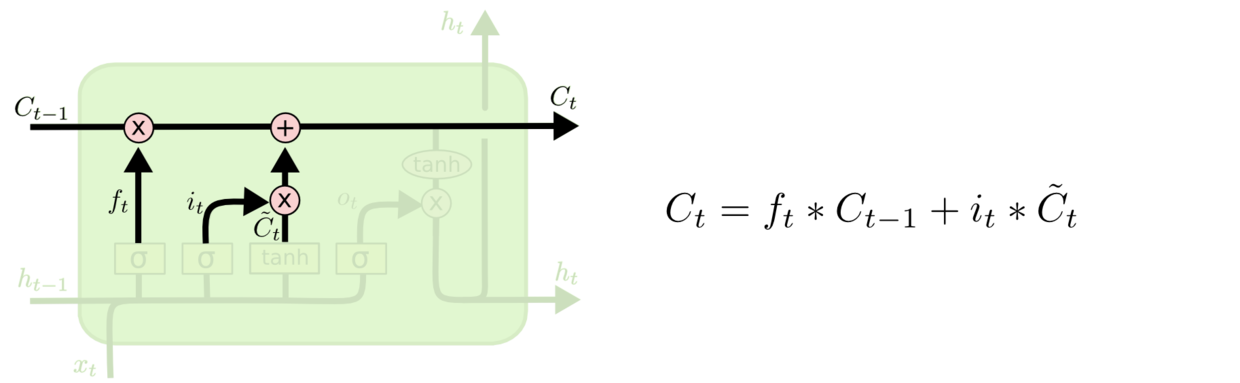
- 将 更新为 。将旧状态与 相乘,丢弃掉我们确定需要丢弃的信息。接着加上 得到新的候选值,根据我们决定更新每个状态的程度进行变化。
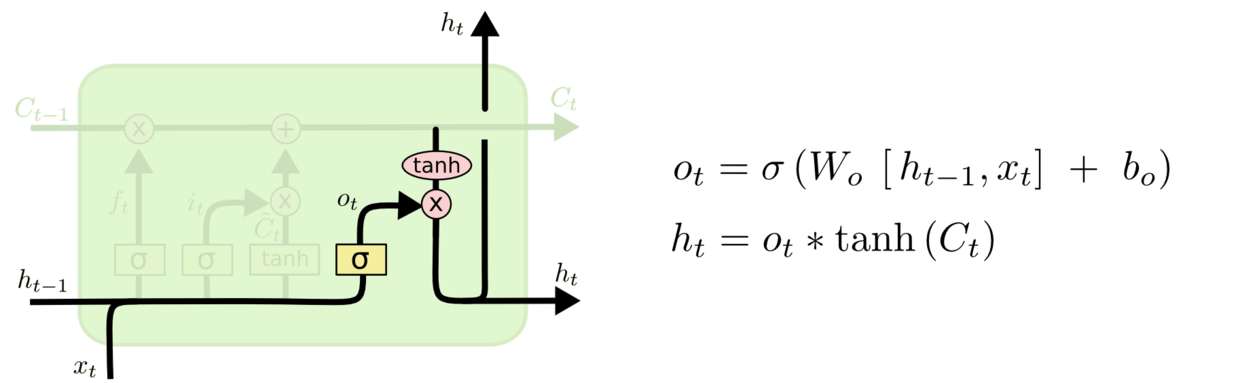
输出层门
-
作用对象:隐层
-
作用:确定输出什么值
-
操作步骤:
-
通过sigmoid 层来确定细胞状态的哪个部分将输出。
-
把细胞状态通过 tanh 进行处理,并将它和 sigmoid 门的输出相乘,最终我们仅仅会输出我们确定输出的那部分。
-
10. LSTMs与GRUs有什么区别?
LSTMs与GRUs的区别如图所示:
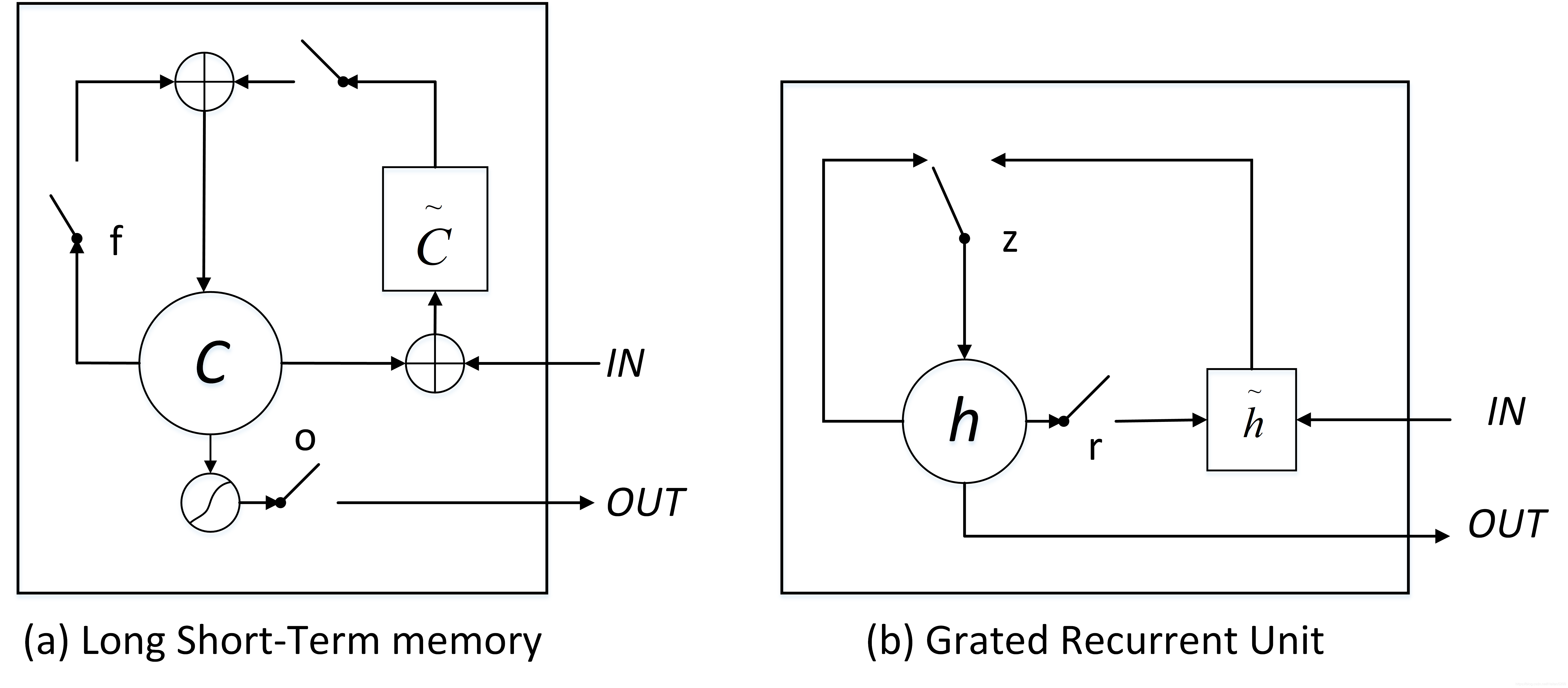
从上图可以看出,二者结构十分相似,不同在于:
-
new memory都是根据之前state及input进行计算,但是GRUs中有一个reset gate控制之前state的进入量,而在LSTMs里没有类似gate;
-
产生新的state的方式不同,LSTMs有两个不同的gate,分别是forget gate (f gate)和input gate(i gate),而GRUs只有一种update gate(z gate);
-
LSTMs对新产生的state可以通过output gate(o gate)进行调节,而GRUs对输出无任何调节。
11. BPTT算法推导
BPTT(back-propagation through time)算法是常用的训练RNN的方法,其本质还是BP算法,只不过RNN处理时间序列数据,所以要基于时间反向传播,故叫随时间反向传播。BPTT的中心思想和BP算法相同,沿着需要优化的参数的负梯度方向不断寻找更优的点直至收敛。需要寻优的参数有三个,分别是
。与BP算法不同的是,其中
和
两个参数的寻优过程需要追溯之前的历史数据,参数
相对简单只需关注目前,先求解参数V的偏导数。
RNN的损失也是会随着时间累加的,所以不能只求t时刻的偏导。
和
的偏导的求解由于需要涉及到历史数据,其偏导求起来相对复杂。为了简化推导过程,假设只有三个时刻,那么在第三个时刻
对
,
对
的偏导数分别为:
可以观察到,在某个时刻的对
或是
的偏导数,需要追溯这个时刻之前所有时刻的信息。根据上面两个式子得出L在
时刻对
和
偏导数的通式:
整体的偏导公式就是将其按时刻再一一加起来。
往期内容
参考文献
- https://github.com/scutan90/DeepLearning-500-questions
- https://github.com/NLP-LOVE/ML-NLP
- https://github.com/songyingxin/NLPer-Interview
- https://blog.csdn.net/vivian_ll/article/details/88780661

