建议先阅读<上一篇>。
DH参数分配
此处说到的SCARA机器人是KUKA KR10机器人:
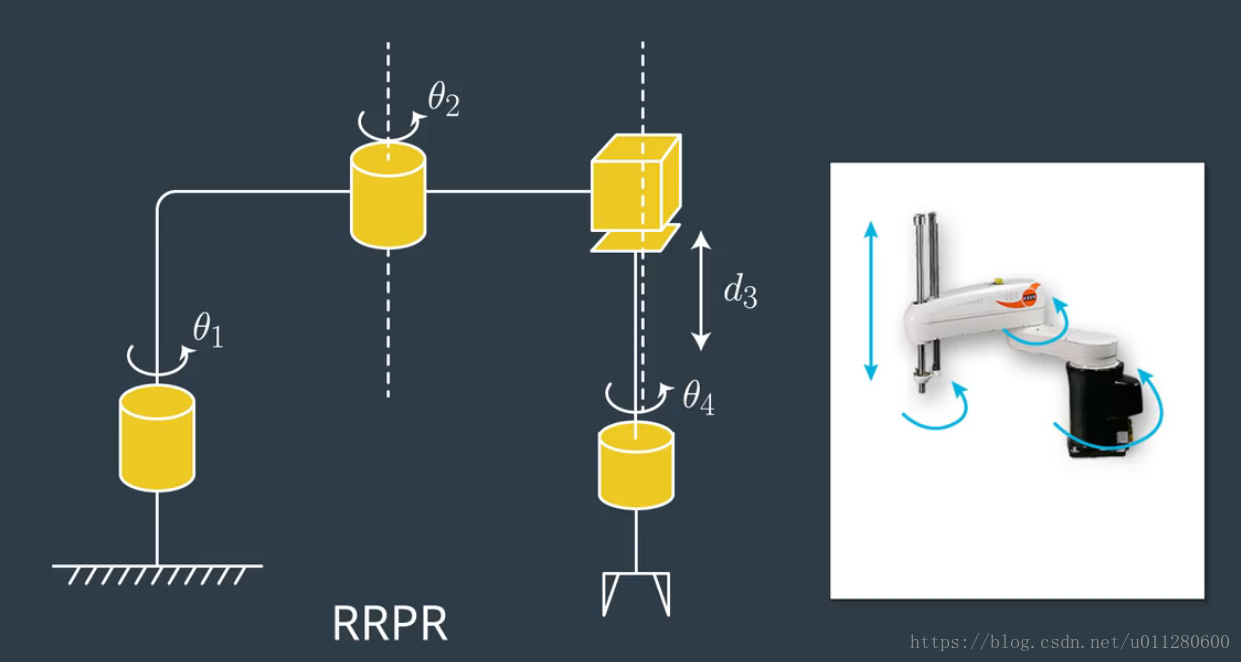
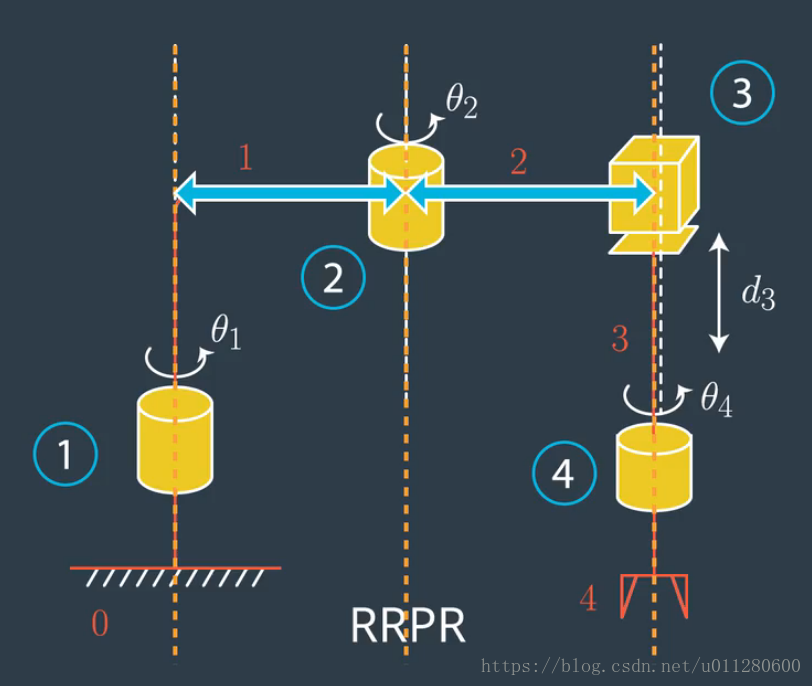
它是一个revolute_revolute_prismatic_revolute结构或者简称为RRPR结构,并且所有的关节轴都是平行的。
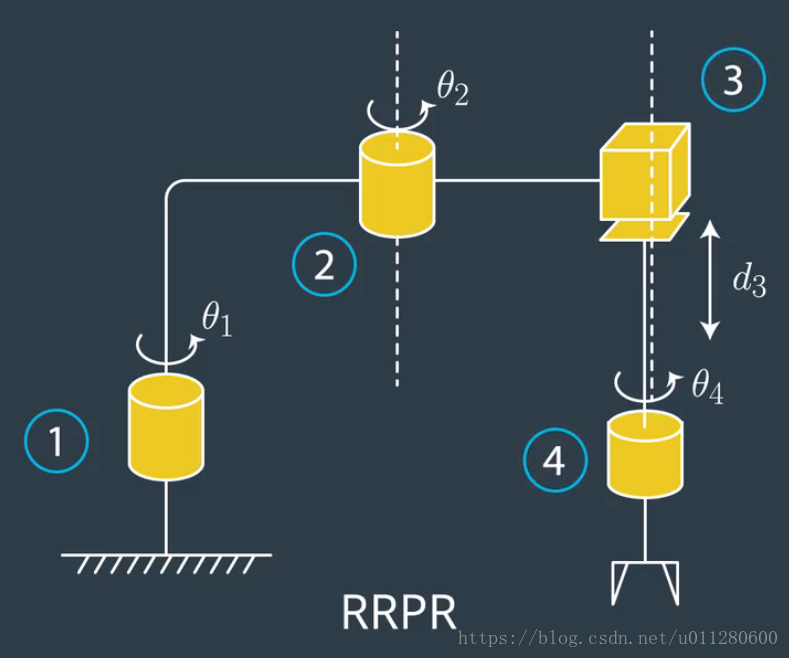
步骤1:从{1,2,…,n}标记所有关节,如下图:
步骤2:从{0,1,…,n}标记所有连杆,0表示为固定连杆,如下图:
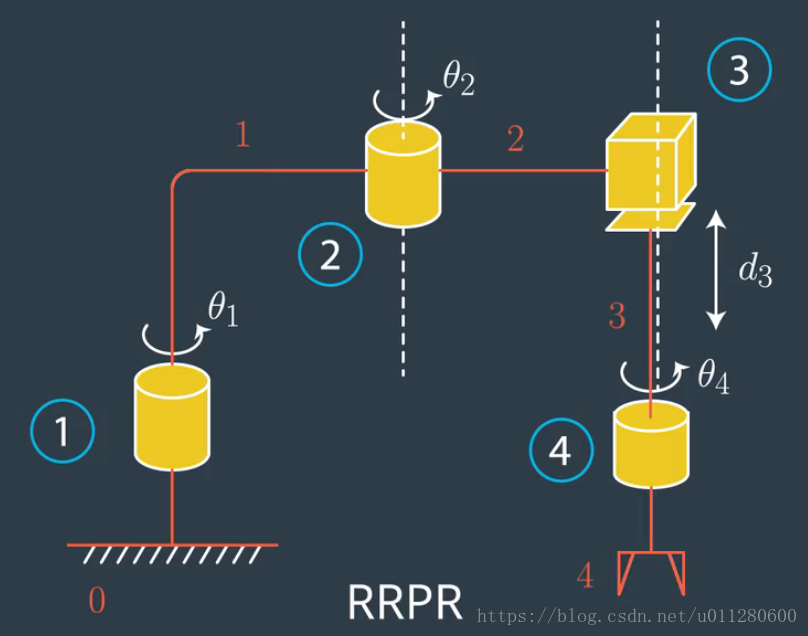
步骤3:绘制线条通过所有关节,定义关节轴,如下图:
关节3和关节4是一致的。
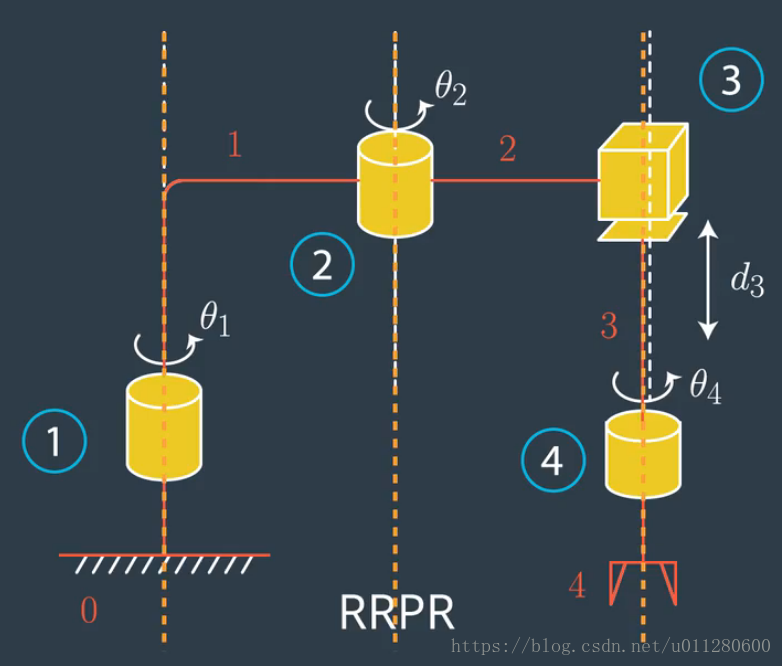
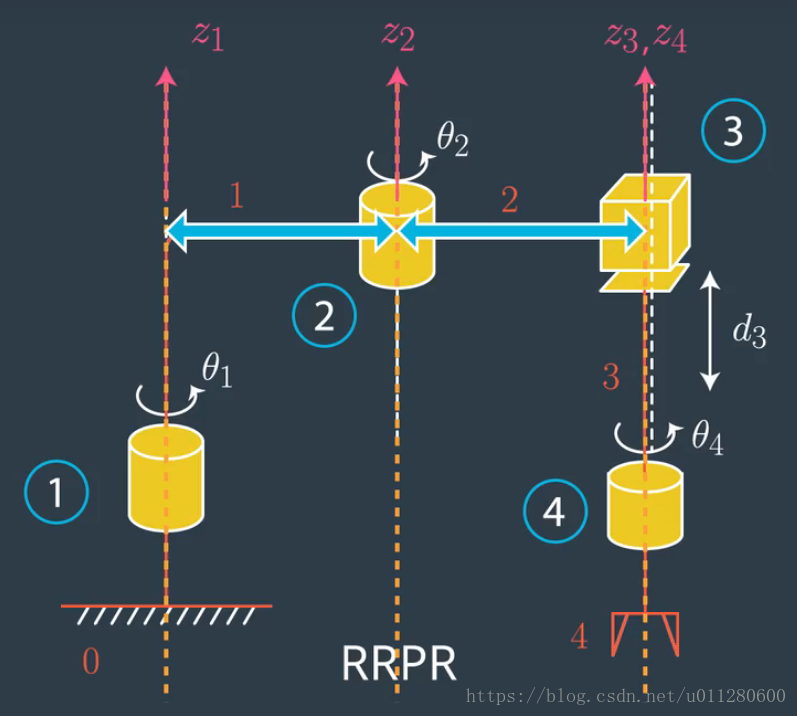
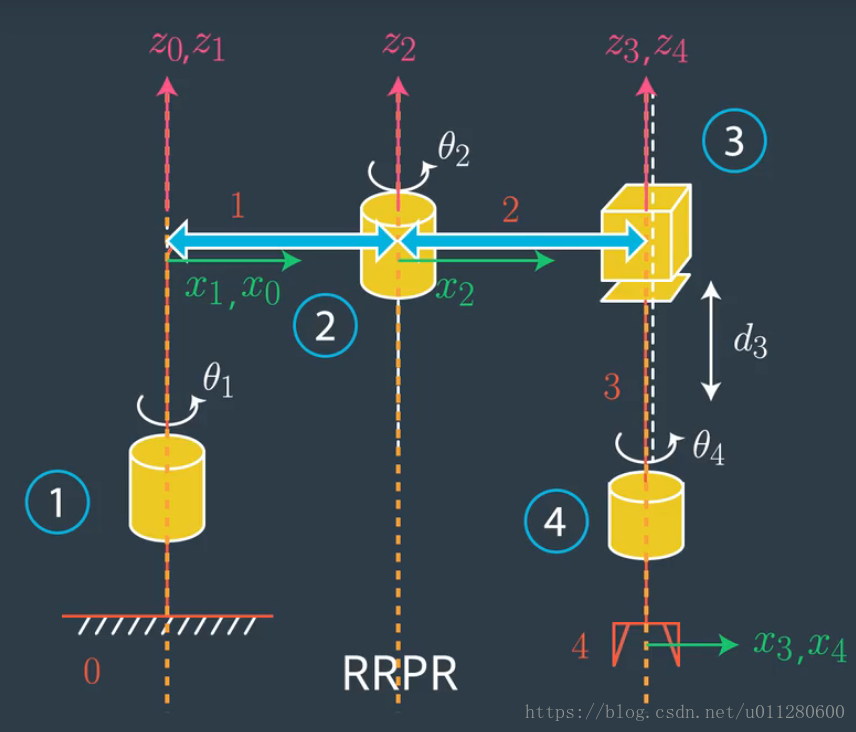
步骤4:将每个坐标系的Z轴指定为沿其关节轴指向的点,如下图:
步骤5:定义各坐标系z轴方向,如下图:
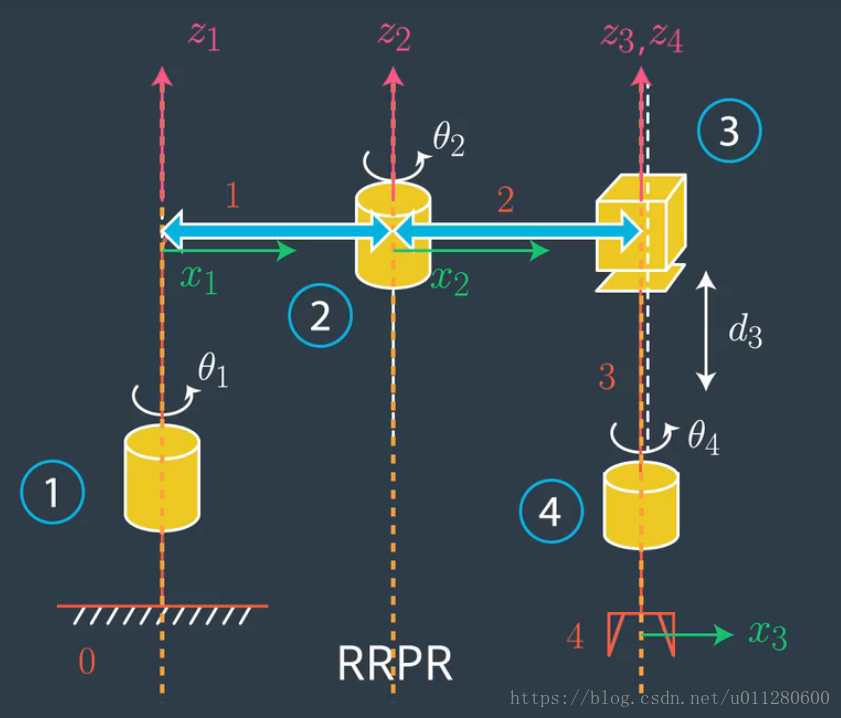
步骤6:定义各坐标系x轴方向,不包括0轴和末端执行器轴,如下图:
步骤7:标记基础坐标系,如下图:
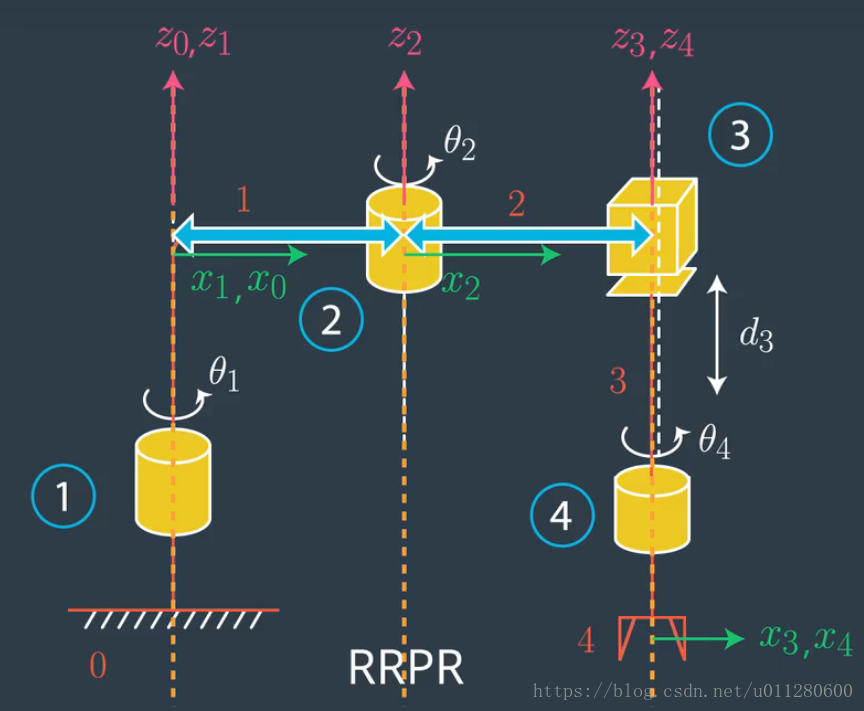
步骤8:标记末端执行器,如下图:
DH参数表填写
建议先读<这篇文章>.
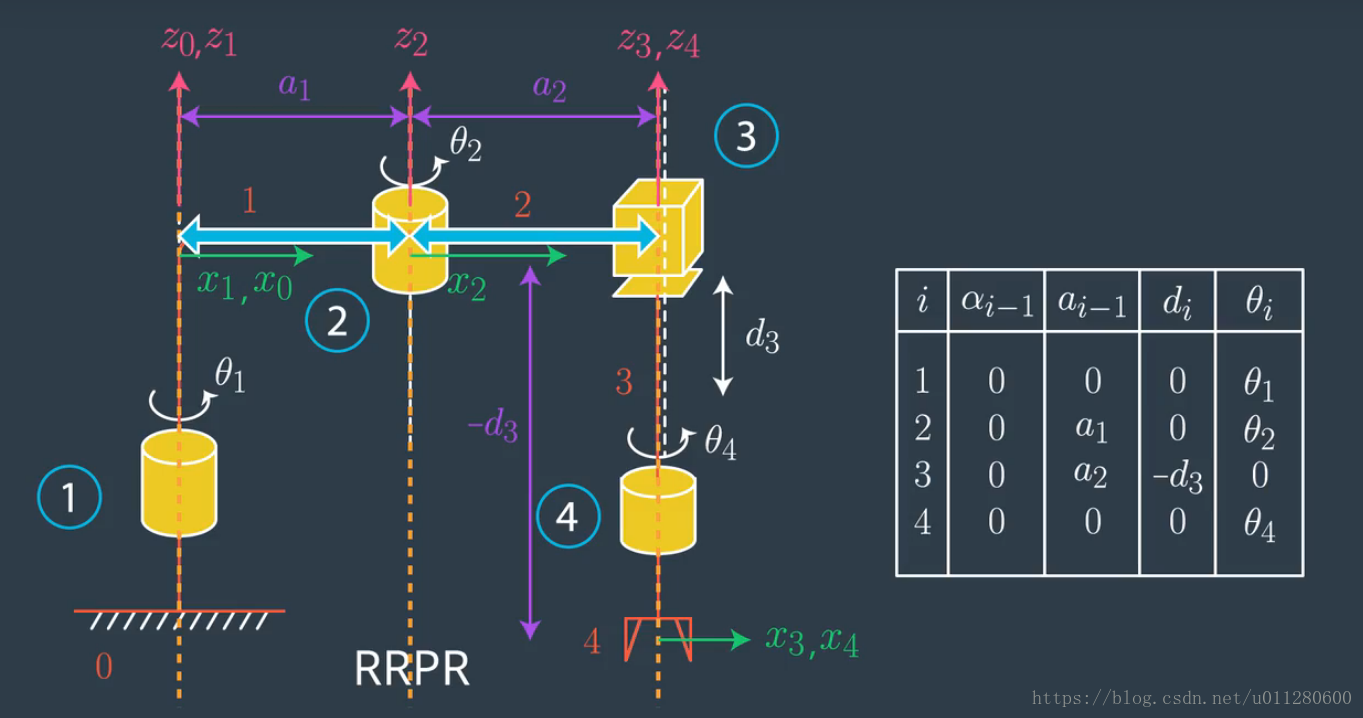
i=1时,alpha 0 表示z0和z1在x0方向的夹角,遵循右手法则。
a0表示z0到z1在x0方向的距离。
d1表示x0到x1沿着z1方向的距离。
theta1表示x0和x1在z1方向的夹角,遵循右手法则,由于当theta1等于0时x0和x1是平行的。但是机器人运动时当theta为0时两个x轴并不平行。所以表中theta1处的值应为theta加上一个偏移常量。i=2时,alpha 1表示z1和z2在x1方向的夹角,遵循右手法则。
a1表示z1到z2在x1方向的距离。
d2表示x1到x2沿着z2方向的距离。
theta2的值同theta1的逻辑。i=3时,alpha 2表示z2和z3在x2方向的夹角,遵循右手法则。
a2表示z2到z3在x2方向的距离。
d3表示x2到x3沿着z3方向的距离。
因为关节3是移动轴,所以theta3为0。i=4时,alpha 3表示z3和z4在x3方向的夹角,遵循右手法则。
a3表示z3到z4在x3方向的距离。
d4表示x3到x4沿着z4方向的距离。
theta4的值同theta1的逻辑。