(机器人技术基础实验matlab DH修正参数求旋转矩阵描述和计算X-Y-Z固定角描述)
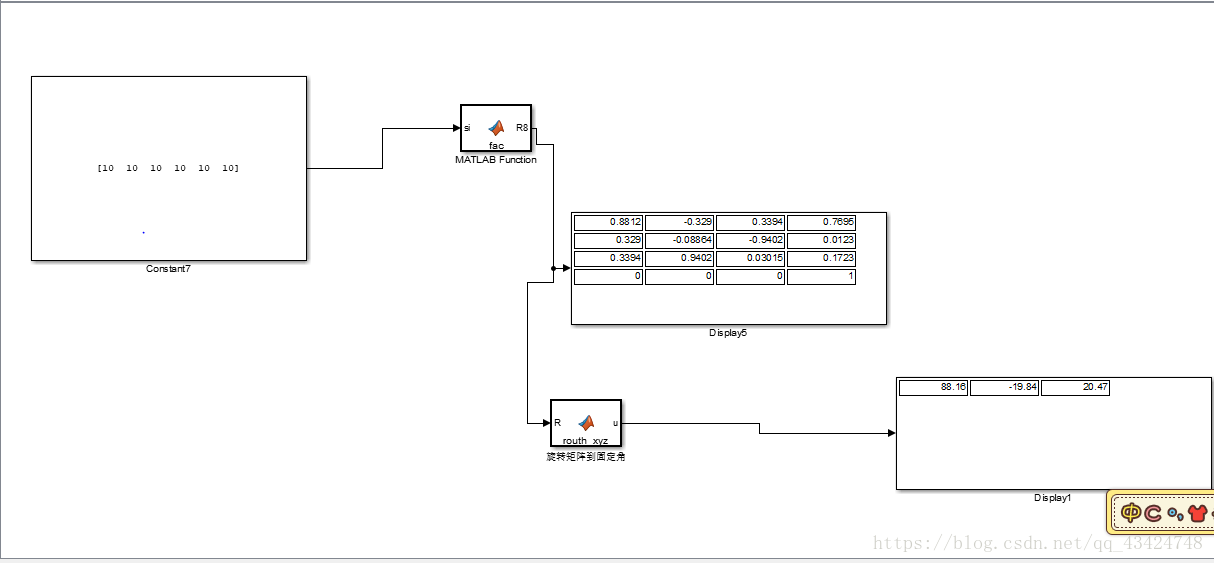
simulink效果图:
DH参数到旋转矩阵代码
function R8 = fac(si)
i=1;
R8=eye(4,4);
DH=[0,0,0,si(1)*pi/180;pi/2,0,0.2155,si(2)*pi/180;pi,0.408,0.2155,si(3)*pi/180;pi,0.376,0.1215,si(4)*pi/180;-pi/2,0,0.103,si(5)*pi/180;pi/2,0,0,si(6)*pi/180];
while(i<7)
R(1,1)=cos(DH(i,4));
R(1,2)=-sin(DH(i,4));
R(1,3)=0;
R(1,4)=DH(i,2);
R(2,1)=sin(DH(i,4))*cos(DH(i,1));
R(2,2)=cos(DH(i,4))*cos(DH(i,1));
R(2,3)=-sin(DH(i,1));
R(2,4)=-sin(DH(i,1))*DH(i,3);
R(3,1)=sin(DH(i,4))*sin(DH(i,1));
R(3,2)=cos(DH(i,4))*sin(DH(i,1));
R(3,3)=cos(DH(i,1));
R(3,4)=cos(DH(i,1))*DH(i,3);
R(4,1)=0;
R(4,2)=0;
R(4,3)=0;
R(4,4)=1;
R
R8=R8*R
i=i+1
end
R8
旋转矩阵到X-Y-Z固定角代码
function u=routh_xyz(R)
u=zeros(3,1);
r11=R(1,1);
r12=R(1,2);
r13=R(1,3);
r21=R(2,1);
r22=R(2,2);
r23=R(2,3);
r31=R(3,1);
r32=R(3,2);
r33=R(3,3);
u(2)=atan2(-r31,sqrt(r11^2+r21^2));
if cos(u(2))~=0
u(3)=atan2(r21/cos(u(2)),r11/cos(u(2)))*180/pi;
u(1)=atan2(r32/cos(u(2)),r33/cos(u(2)))*180/pi;
u(2)=u(2)*180/pi;
else
u(1)=0;
u(2)=90;
u(3)=atan2(r12,r22)*180/pi;
end
end