7. 电路与系统函数
7.1. 电路分析
7.1.1. 电路的s域模型
电路元件的s域模型
- 对时域电路取拉氏变换:
-
电阻:
u(t)=R⋅i(t)→U(s)=R⋅I(s)
![[电阻图]](https://img-blog.csdnimg.cn/20200327171902684.PNG)
-
电感:
u(t)=LdtdiL(t)iL(t)=iL(0−)+L1∫0−tuL(τ)dτ→U(s)=sL⋅IL(s)−L⋅iL(0−)→IL(s)=sL1UL(s)+siL(0−)
![[电感图]](https://img-blog.csdnimg.cn/20200327171917277.PNG?x-oss-process=image/watermark,type_ZmFuZ3poZW5naGVpdGk,shadow_10,text_aHR0cHM6Ly9ibG9nLmNzZG4ubmV0L1ZhcmFscGhh,size_16,color_FFFFFF,t_70)
- 电流源并联阻抗和电压源串联阻抗的相互转换:
- 阻抗数值不变
- 源的数值满足欧姆定律的关系 电压
=电流
×阻抗
- 产生的电流方向一致
-
电容:
i(t)=CdtduC(t)uC(t)=uC(0−)+C1∫0−tiC(τ)dτ→I(s)=C⋅UC(s)−C⋅uC(0−)→UC(s)=sC1I(s)+suC(0−)
![[电容图]](https://img-blog.csdnimg.cn/20200327171931603.PNG?x-oss-process=image/watermark,type_ZmFuZ3poZW5naGVpdGk,shadow_10,text_aHR0cHM6Ly9ibG9nLmNzZG4ubmV0L1ZhcmFscGhh,size_16,color_FFFFFF,t_70)
- 电流源并联阻抗和电压源串联阻抗的相互转换:
- 阻抗数值不变
- 源的数值满足欧姆定律的关系 电压
=电流
×阻抗
- 产生的电流方向一致
-
电源
is(t)→Is(s)us(t)→Us(s)
外部约束的s域模型
- 节点 – KCL
∑i(t)=0→∑I(s)=0
- 回路 – KVL
∑u(t)=0→∑U(s)=0
7.1.2. 电路系统的 s 域分析方法
- 思路:
- 时域电路
→ s域模型
-
ik(t),uk(t)→Ik(s),Uk(s)
- s域电路 使用分析方法
- 线性叠加原理、节点法、网孔法。。。
- 求出
IK(s),Uk(s)
- 取拉普拉斯反变换
- 求
ik(t),uk(t)
7.2. 系统函数
7.2.1. 复频域分析
f(t)→h(t)→y(t)=f(t)⋆h(t)
F(s)→H(s)→Y(s)=F(s)⋅H(s)
7.2.2. 微分方程的变换解
-
n 阶系统的微分方程:
i=0∑nαiy(i)(t)=j=0∑mβjf(j)(t)
- 系统初始状态为
y(0−,y(1)(0−),⋯,y(n−1)(0−)
-
使用拉普拉斯变换微分特性:
y(i)i=0∑nαiy(i)(t)⟷⟷siY(s)−[i=0∑naisi]Y(s)−p=0∑i−1si−1−py(p)(0−)i=0∑nai[p=0∑i−1si−1−py(p)(0−)]
-
若
f(t) 在
t=0 时接入系统,则
f(n)(t)j=0∑mβjf(j)(t)⟷snF(s)⟷[j=0∑mbjsj]F(s)
-
求得:
[i=0∑naisi]Y(s)−i=0∑nai[p=0∑i−1si−1−py(p)(0−)]=[j=0∑mbjsj]F(s)
Y(s)=i=0∑naisii=0∑nai[p=0∑i−1si−1−py(p)(0−)]Yzi(s)+i=0∑naisij=0∑mbjsjF(s)Yzs(s)=A(s)M(s)+A(s)B(s)F(s)
Yzi(s)+Yzs(s)=Y(s)→y(t)=yzi(t)+yzs(t)
-
步骤 :
- 方程式两边取
L
- 解出
Y(s)=Yzi(s)+Yzs(s)
- 取
L−1→y(t)
7.2.3. 连续系统函数 H
- 系统函数
H(s) 定义:
H(s)=defF(s)Yzs(s)=A(s)B(s)
- 它只与系统的结构、元件参数有关,与激励、初始状态无关。
yzs(t)=h(t)⋆f(t)→Yzs(s)=L[h(t)]⋅F(s)
H(s)=L[h(t)]
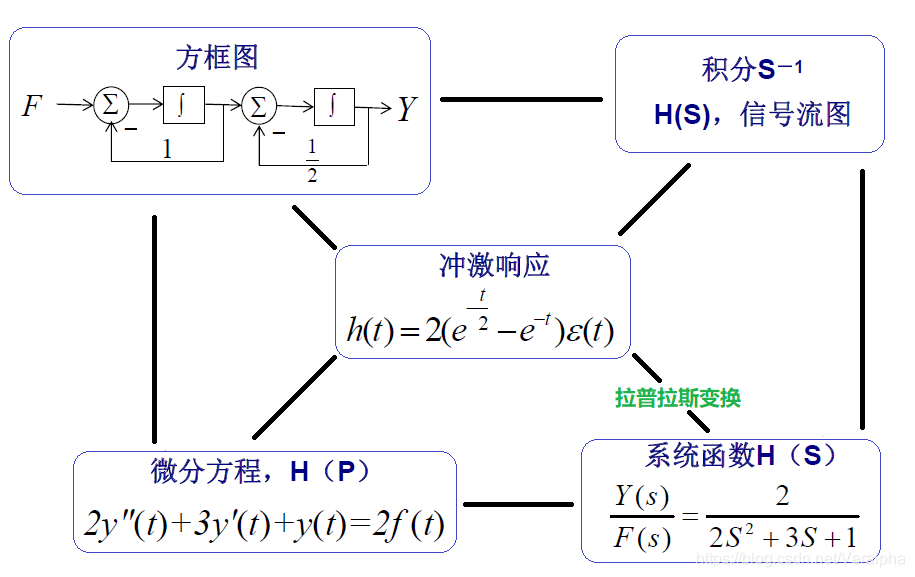
- 连续系统不同描述方法的关系
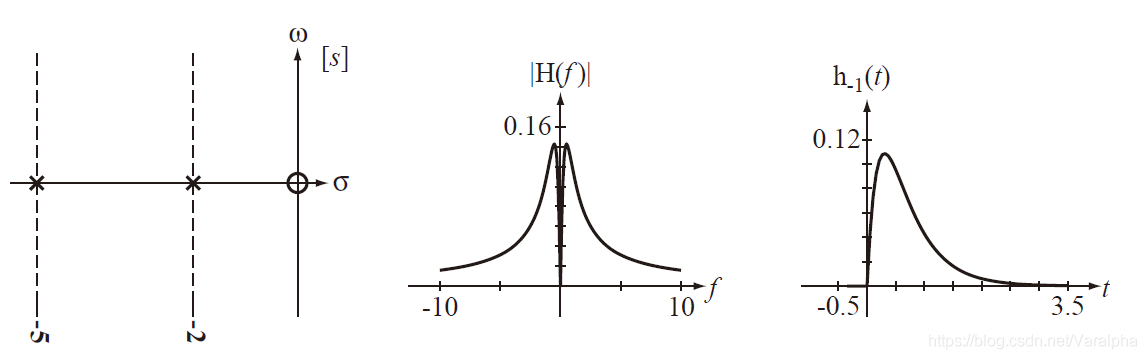
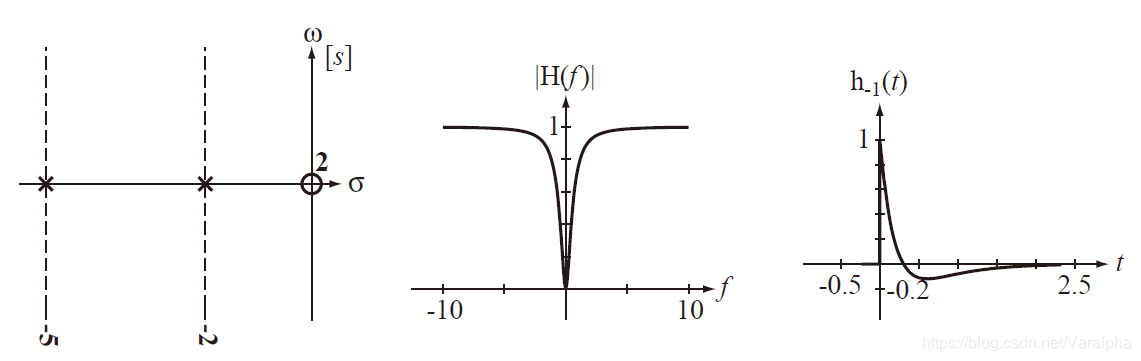
7.2.4. H 零极点分布与时域特性
-
极点在 左半开平面
a. 若系统函数有负实单极点
p=–α(α>0) ,则
A(s) 中有因子
(s+α) ,其对应的响应函数为
Ke−αtε(t)
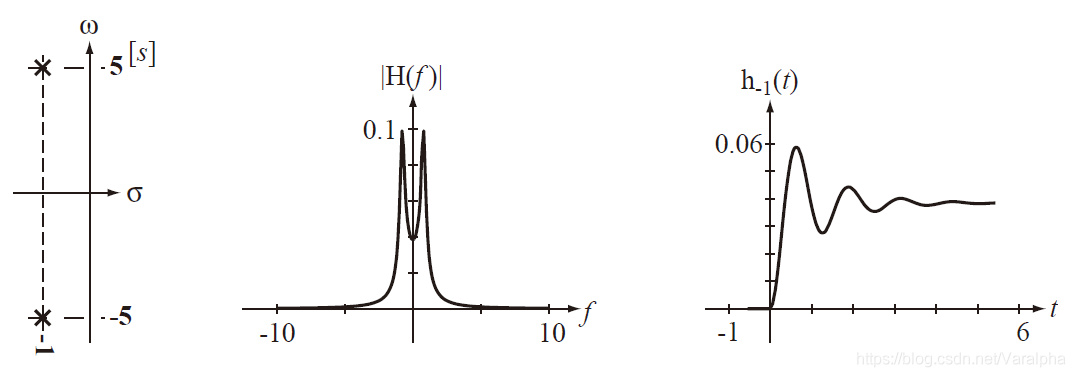
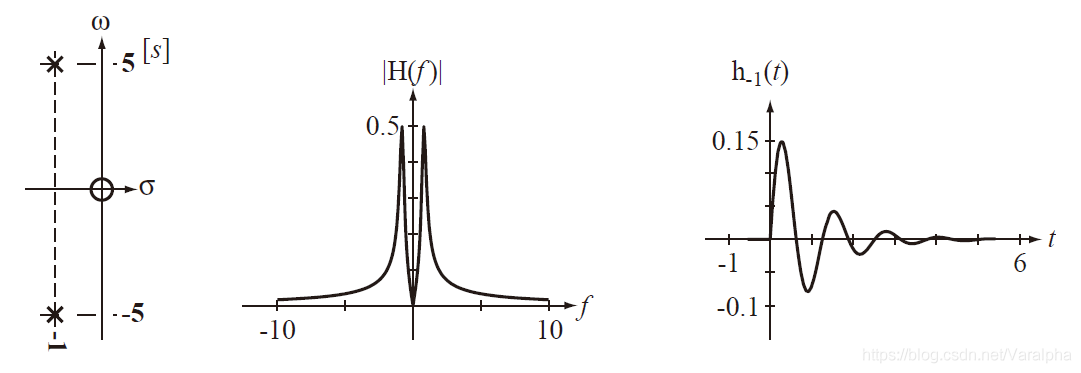
b. 若有一对共轭复极点
p12=−α±jβ ,则
A(s) 中有因子
[(s+α)2+β2]↔Ke−αtcos(βt+θ)ε(t)
c. 若有
r 重极点, 则
A(s) 中有因子
(s+α)r 或
[(s+α)2+β2]r ,其响应为
Kitie−αtε(t)或Kitie−αtcos(βt+θ)ε(t),(i=0,1,2,⋯,r−1)
以上三种情况:当
t→∞ 时,响应均趋于
0 ,属暂态分量。
-
极点在 虚轴上
a. 单极点
p=0 或
p12=±jβ,则响应为
Kε(t) 或
Kcos(βt+θ)ε(t) — 稳态分量
b.
r 重极点,相应
A(s)中有
sr 或
(s2+β2)r ,其响应函数为
tiε(t) 或
Kiticos(βt+θ)ε(t),(i=0,1,2,…,r−1) — 递增函数
-
在 右半开平面:
a. 均为递增函数。 (不稳定)
7.2.5 连续系统稳定性判别
-
连续系统稳定的充分必要条件是:
∫−∞−∞∣h(t)∣dt≤M
- 若
H(s) 的收敛域包含虚轴,则该系统必是稳定系统。
-
连续因果系统稳定的充分必要条件是:
∫0−∞∣h(t)∣dt≤M
系统左半开平面的极点对应的响应为衰减函数,若
H(s) 的极点均在左半开平面,则该系统必是稳定的因果系统。
-
系统稳定:
- 绝对可积分
- 收敛域包含虚轴 --> 所有极点均在左半开平面
-
Re[s]>σ0,(σ0<0)
-
稳定系统的 s 域判别方法:
- 必要条件:
H(s)=A(s)B(s)
A(s)=ansn+an−1sn−1+⋯+a1s+a0
若系统稳定,则
ai>0,i=0,1,2,3,⋯,n
- 充分必要条件:
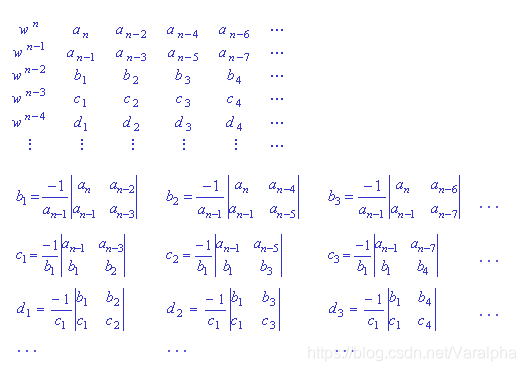
- 霍尔维茨准则(罗斯阵列、 R—H排列) Routh Criterion
- 若罗斯阵列的第一列元素 ( 第一行至
n+1 行 ) 的符号相同 ( 全为 “+”号或全为 “-”号 ),则
H(s) 的极点全部在左半平面,系统稳定。
- 特例:
- 倒序排列
- 前面为零,引入无穷小量
0→δ
- 全零行,引入一个辅助多项式(幂求导)->虚轴有根
- 符号改变几次,右半平面就有几个根
7.2.6. Python 绘制零极点图、判断稳定
- 利用 Python 画出系统
H(s)=s4+3s3+4s2+6s+4s2+4s+3
的零极点图,并判断系统的稳定性。
import numpy as np
import matplotlib.pyplot as plt
import control
a, b = [1,3,4,6,4],[1,4,3]
sys = control.tf(b,a)
control.rlocus(sys,ylim=(-1.5,1.5));
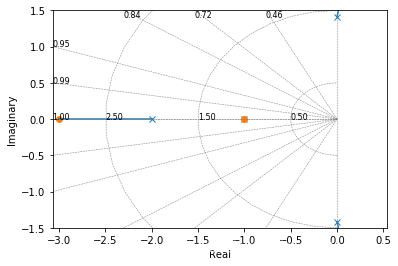
- 系统的零极图,如图所示,可见系统有4个极点,2个零点,其中在虚轴上有一对共轭极点,故该系统是不稳定的。
7.2.7. 系统函数
- 系统函数
H(s) 与
H(jω
- 设
h(t) 为因果信号
H(s)=∫0−∞h(t)e−stdt,σ>σ0
H(jω)=∫−∞∞h(t)e−jωtdt=∫0−∞h(t)e−jωtdt
- 当
σ>σ0 且
σ0<0 时(
H(s) 极点在左半平面)
H(jω)=H(s)∣∣s=jω
- 这种情况下,h(t) 对应的系统称为因果稳定系统
-
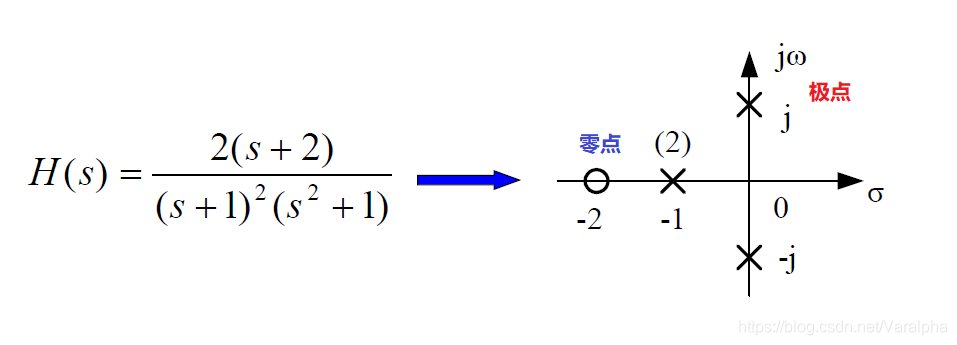
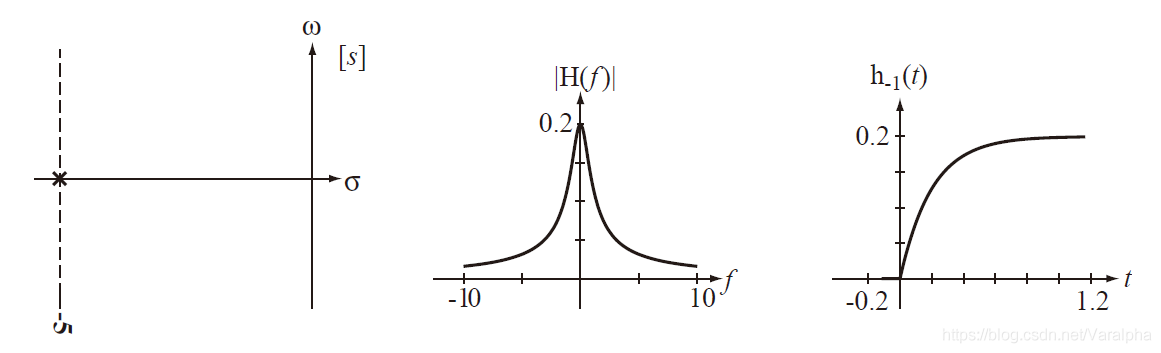
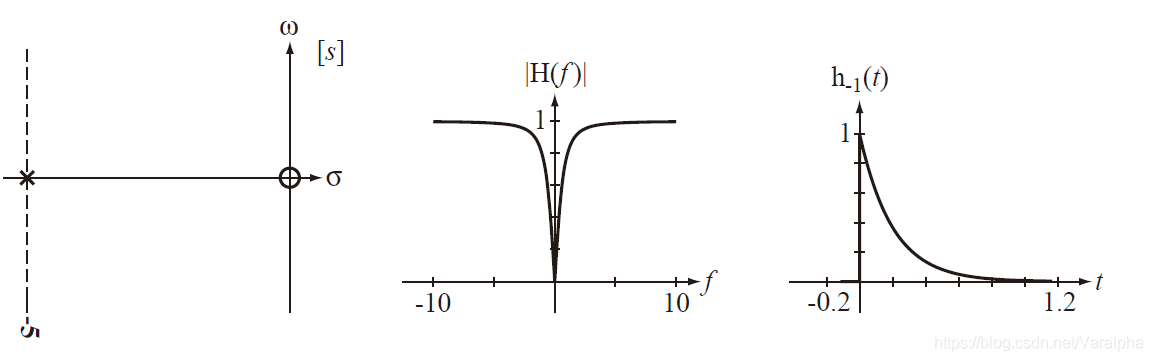
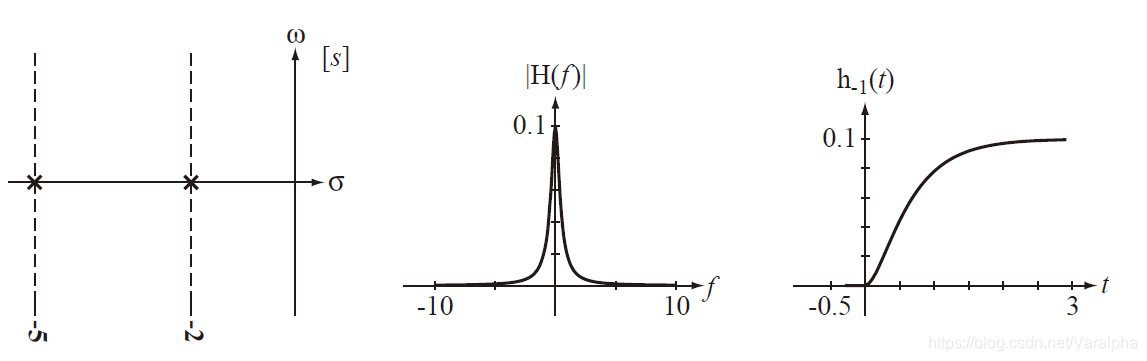
H(s) 零、极点与连续系统频率特性
- 设
H(s)=(s−p1)⋯(s−pn)bm(s−ζ1)⋯(s−ζm)
- 若
H(s) 极点均在左半开平面,则
H(jω)=H(s)∣∣s=jω
H(jω) 又称为系统的频率响应
H(s)=(jω−p1)⋯(jω−pn)bm(jω−ζ1)⋯(jω−ζm)=i=1∏n(jω−pi)bmi=1∏m(jω−ζi)
设
jω−ζi=Biejψi,jω−pi=Aiejθi,i=1,2,3,⋯,mi=1,2,3,⋯,n
则
H(s)=A1A2⋯Anej(θ1+θ2+⋯+θm)bmB1B2⋯Bmej(ψ1+ψ2+⋯+ψm)=H(ω)ejϕ(ω)
H(ω)=A1A2⋯AnbmB1B2⋯Bm
ϕ(ω)=(ψ1+ψ2+⋯+ψm)−(θ1+θ2+⋯+θm)
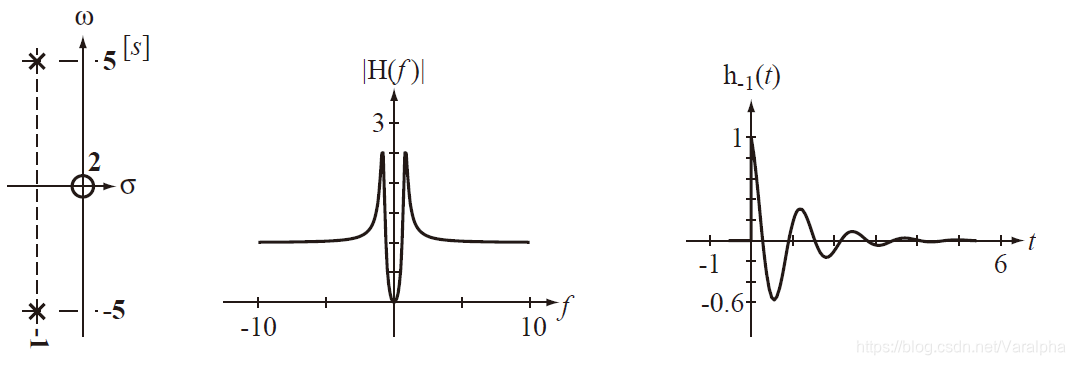
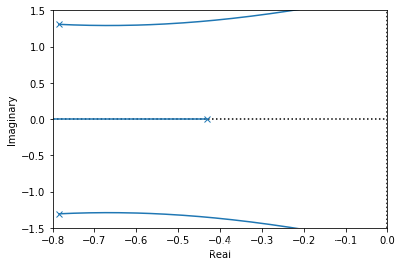
7.2.8. Python 求频率响应函数,判断稳定
a, b = [1,2,3,1],[1]
sys = control.tf(b,a)
control.rlocus(sys,ylim=(-1.5,1.5),xlim=(-0.8,0),grid=False);
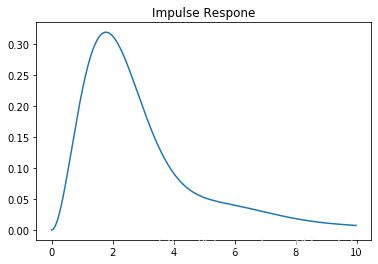
t = np.arange(0,10,0.02)
h = control.impulse_response(sys,t)
plt.plot(h[0],h[1])
plt.title('Impulse Respone')
plt.show()
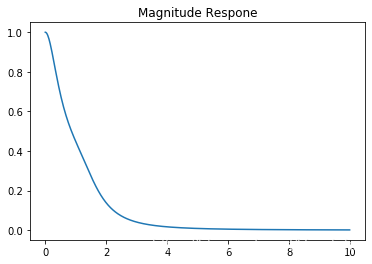
freq = control.freqresp(sys,t)
plt.plot(freq[2],freq[0][0][0])
plt.title('Magnitude Respone')
plt.show()
- 频率响应
To TOP 至目录