前言
ubuntu下安装各种库的方式其实都一样。下载源码,然后cmake编译安装即可,跟windows下直接下载.exe其实是一个道理,当然还可以用apt-get install,但是那要官方的维护而且有的会不是最新的。废话不说,正式开始安装教程!
PCL的编译安装
首先,要先安装一大堆依赖库:
sudo apt-get update
sudo apt-get install git build-essential linux-libc-dev
sudo apt-get install cmake cmake-gui
sudo apt-get install libusb-1.0-0-dev libusb-dev libudev-dev
sudo apt-get install mpi-default-dev openmpi-bin openmpi-common
sudo apt-get install libflann1.8 libflann-dev
sudo apt-get install libeigen3-dev
sudo apt-get install libboost-all-dev
sudo apt-get install libvtk5.10-qt4 libvtk5.10 libvtk5-dev
sudo apt-get install libqhull* libgtest-dev
sudo apt-get install freeglut3-dev pkg-config
sudo apt-get install libxmu-dev libxi-dev
sudo apt-get install mono-complete
sudo apt-get install qt-sdk openjdk-8-jdk openjdk-8-jre
然后git clone源码:
git clone https://github.com/PointCloudLibrary/pcl.git
当然也可以去官网下载压缩包然后解压安装。这是官网的安装教程。
之后是编译源码,考验电脑性能的时候到啦:
cd pcl
mkdir release
cd release
cmake -DCMAKE_BUILD_TYPE=None -DCMAKE_INSTALL_PREFIX=/usr \
-DBUILD_GPU=ON -DBUILD_apps=ON -DBUILD_examples=ON \
-DCMAKE_INSTALL_PREFIX=/usr ..
make -j4
注: make -j4就是使用几个cpu的线程去编译,视情况而定,我自己用的是j10,之所以没有j12,是因为宕机了一次,血泪教训呀!
最后就是安装,整个过程耗时,不同机子不尽相同:
sudo make install
在自己的程序里测试PCL点云的显示
我是在clion这个IDE下新建的工程,嫌麻烦的也可以直接用cmake做。
在pcl_test键入以下代码:
#include <iostream>
#include <pcl/common/common_headers.h>
#include <pcl/visualization/pcl_visualizer.h>
#include <pcl/visualization/cloud_viewer.h>
#include <pcl/console/parse.h>
int main(int argc, char **argv) {
std::cout << "Test PCL !!!" << std::endl;
pcl::PointCloud<pcl::PointXYZRGB>::Ptr point_cloud_ptr (new pcl::PointCloud<pcl::PointXYZRGB>);
uint8_t r(255), g(15), b(15);
for (float z(-1.0); z <= 1.0; z += 0.05)
{
for (float angle(0.0); angle <= 360.0; angle += 5.0)
{
pcl::PointXYZRGB point;
point.x = 0.5 * cosf (pcl::deg2rad(angle));
point.y = sinf (pcl::deg2rad(angle));
point.z = z;
uint32_t rgb = (static_cast<uint32_t>(r) << 16 |
static_cast<uint32_t>(g) << 8 | static_cast<uint32_t>(b));
point.rgb = *reinterpret_cast<float*>(&rgb);
point_cloud_ptr->points.push_back (point);
}
if (z < 0.0)
{
r -= 12;
g += 12;
}
else
{
g -= 12;
b += 12;
}
}
point_cloud_ptr->width = (int) point_cloud_ptr->points.size ();
point_cloud_ptr->height = 1;
pcl::visualization::CloudViewer viewer ("test");
viewer.showCloud(point_cloud_ptr);
while (!viewer.wasStopped()){ };
return 0;
}
CMakeLists.txt文件为:
cmake_minimum_required(VERSION 3.5)
project(pcl_test)
find_package(PCL REQUIRED)
include_directories(${PCL_INCLUDE_DIRS})
link_directories(${PCL_LIBRARY_DIRS})
add_definitions(${PCL_DEFINITIONS})
add_executable(pcl_test pcl_test.cpp)
target_link_libraries (pcl_test ${PCL_LIBRARIES})
install(TARGETS pcl_test RUNTIME DESTINATION bin)
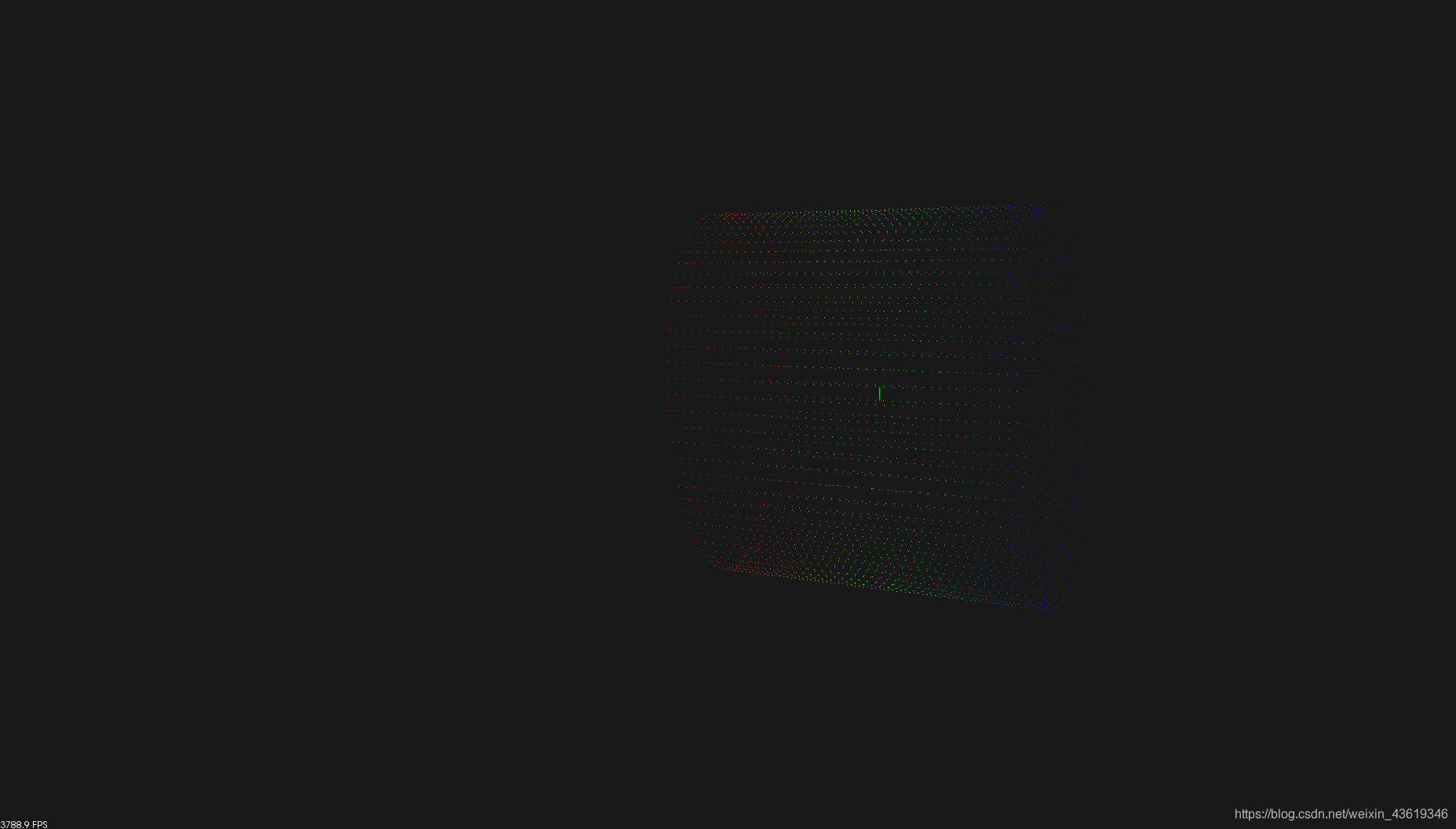
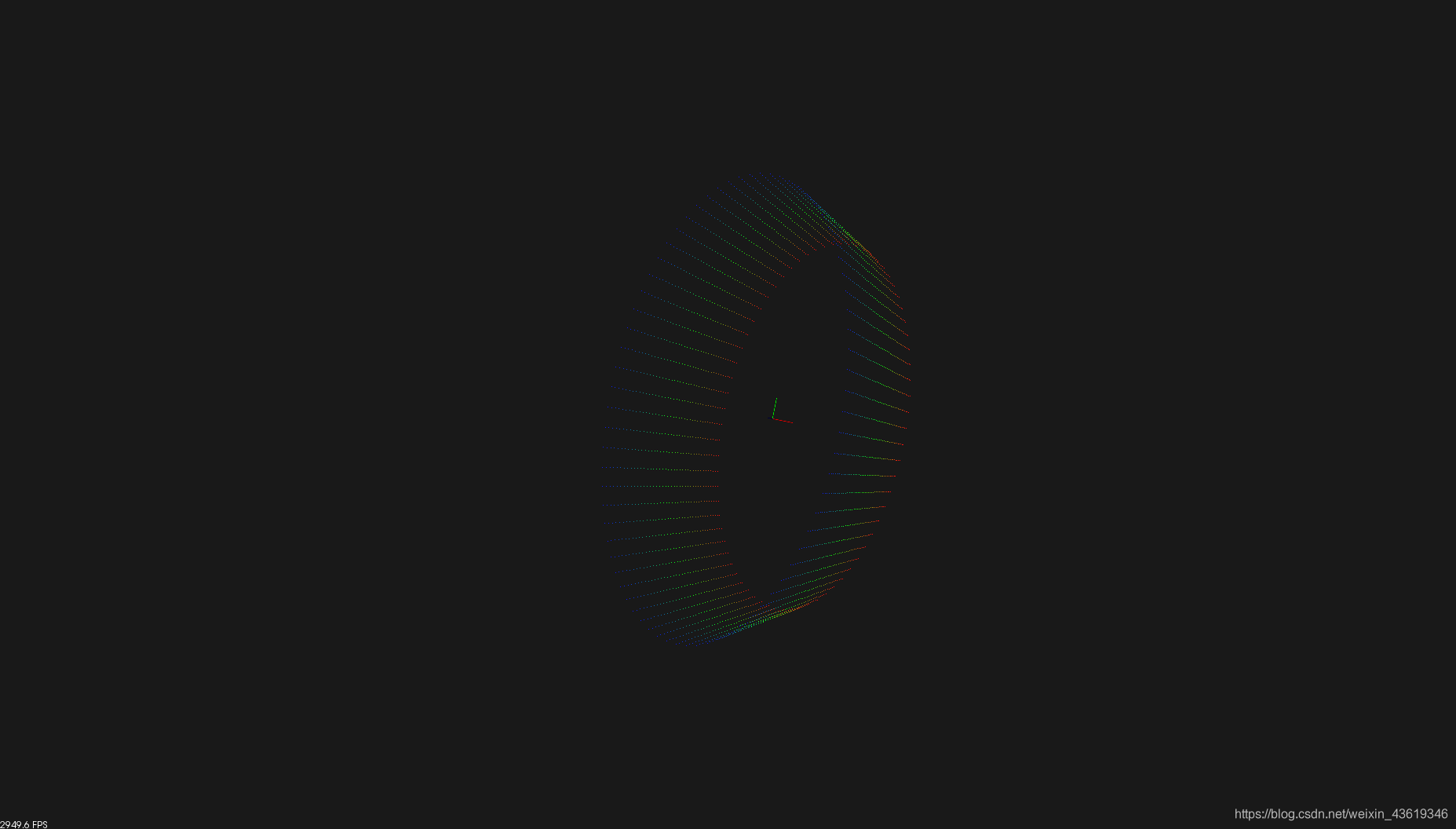
编译执行为一个3D点云图:
如果不用IDE,则把pcl_test.cpp和CMakeLists.txt发在同一个文件夹后,输入命令:
mkdir build
cd build
cmake ..
make
./pcl_test
也可以得到同样的结果!
本教程到此结束~
