- 这里是使用经过配置好的VisualSFM+CMVS+PMVS与MeshLab进行三维重建的,软件安装包可见我的百度网盘链接:链接:https://pan.baidu.com/s/14Sp_5Psu5IHPVzt8ZkBaoQ 提取码:vyfh。MeshLAB的官方下载地址:http://github.com/cnr-isti-vclab/meshlab/releases/download/v2016.12/MeshLab2016.12.exe
整体的三维重建的步骤为:特征提取与匹配->稀疏重建->稠密重建->表面重建。
一、VisualSFM初步重建
二、MeshLab表面重建
1、Possion表面重建系数选择
- Octree Deepth
Set the depth of the Octree used for extracting the final surface, Suggested range 5~10. Higher numbers mean higher precision in the reconstruction but also higher processing times. Be patient
设定八叉树提取最终曲面的深度,建议范围为5~10。较高的重建精度和较高的处理次数。
- Solver Divide
This integer argument specifies the depth at which a block Gauss-Seidel solver is used to solve the Laplacian equation.Using this parameter helps reduce the memory overhead at the cost of a small increase in reconstruction time.
In practice, the authors have found that for reconstructions of depth 9 or higher a subdivide depth of 7 or 8 can reduce the memory usage.The default value is 8.
这个整数参数指定了Gauss-Seidel求解器用于求解Laplacian方程的深度。使用该参数有助于减少内存开销,而代价是重建时间的小幅增加。在实践中,作者发现,对于深度9或更高的重构,7或8的细分深度可以减少内存使用,默认值为8。
- Sample per node
This floating point value specifies the minimum number of sample points that should fall within an octree node as the octree construction is adapted to sampling density. For noise free samples, small values in the range [1.0 ~ 5.0] can be used.
For more noisy samples, larger values in the range [15.0 ~ 20.0] may be needed to provide a smoother, noise reduced, reconstruction,The default value is 1.0.
这个浮点值指定了当八叉树构造适合于采样密度时,应该落在八叉树节点内的样本点的最小数目。对于无噪声的样品,可以使用 [1.0 ~ 5.0]范围内的小值。对于噪声较大的样本,可能需要在范围内较大的值[15.0 ~ 20.0]才能提供平滑、降低噪声、重建,默认值为1.0。
- Surface offsetting
This floating point value specifies a correction value for the isosurface threshold that is chosen Values < 1 means internal offsetting, >1 external offsetting.Good values are in the range 0.5~2.The default value is 1.0 (no offsetting).
这个浮点值指定了等值面阈值的校正值<1表示内部偏移,>1外部偏移。好值在0.5~2之间,默认值为1.0(无偏移)。
三、VisualSFM+MeshLab实现三维重建步骤简述
1、三维重建
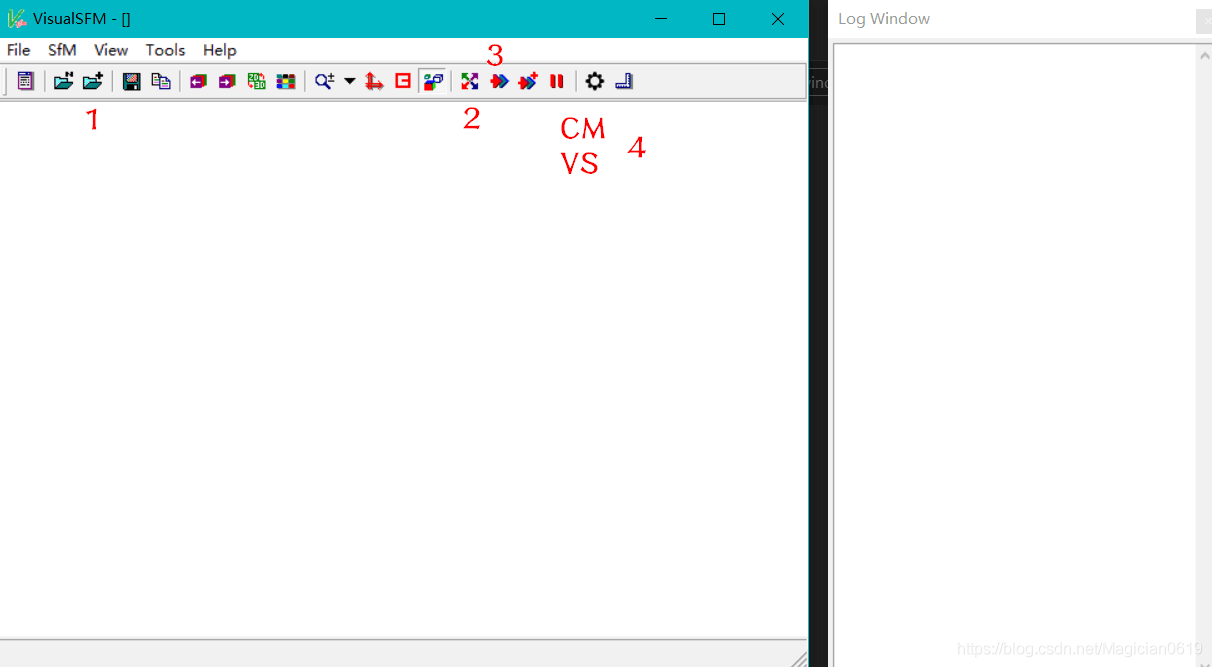
打开VisualSFM_windows_64bit(也可以使用cuda版),软件运行过程中会占满cpu,Log界面可查看进度,此步骤需要等待一段时间。
- 点击按钮1将拍得的照片批量打开
- 接着点击按钮2,利用SIFT算法计算图片每个像素点的特征(常见的用SIFT算子),之后利用SFM(structure from motion)对多张图片像素做匹配对应,通过上步得到的特征,从而估计相机参数,得到稀疏的3D信息
- 点击按钮3,进行稀疏重建
- 点击按钮cmvs利用CMVS/PMVS进行稠密重建,得到点云
2、表面重建
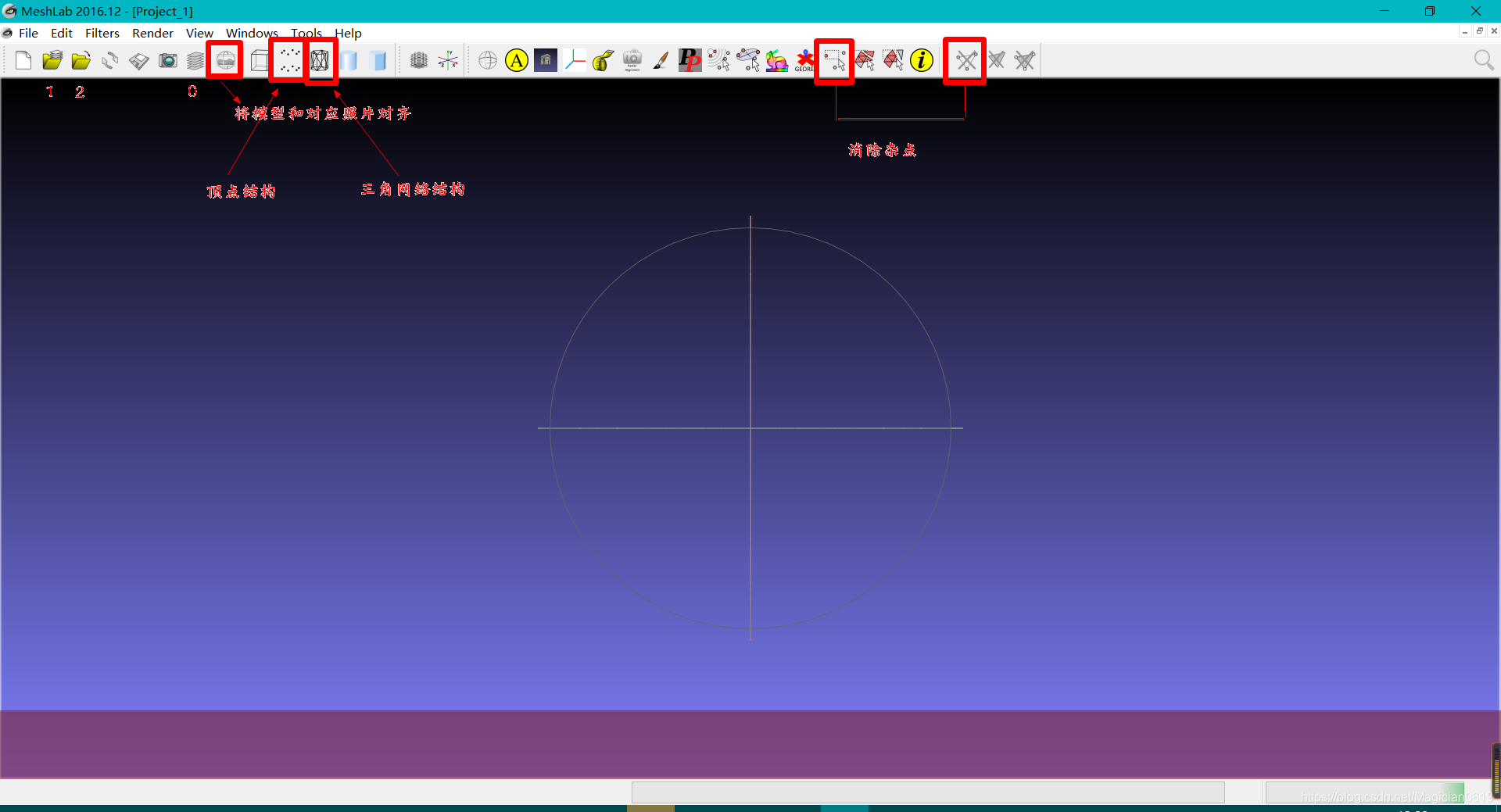
- 点击按钮1打开工程文件,此文件在上一步保存目录的00文件夹下,bundle.rd.out,没找到的话记得修改一下显示文件的拓展名,之后会又弹出一个窗口选择同一目录下的list.txt文件。导入图片和系数点云时会耗费一些时间,软件可能处于卡死状态,不要强制关闭。结束后点击按钮0,界面右侧会出现文件列表。
- 点击按钮2,导入稠密点云文件,文件在…/gardenData/res.nvm.cmvs/00/models路径下,如果有多个.ply文件,导入之后记得合并成一个稠密云模型(在随便某个点云文件上右键->Flatten Visible Layers->修改选项->Apply)
- 泊松表面重建。Filter–> Point Set–> Surface Reconstruction: Poisson,一般选择参数为10,8,5,1
- 消除多余表面。Filters–> Selection–> Select faces with edges longer than (delete)
- Filters–> Selection–> Select Non-Manifold edges (delete)
- 参数化以及纹理投影。Filter-> Texture-> Parameterization + texturing fromregistered rasters