1、内模控制的产生背景
现代控制的局限在于:(1)难以建立精确数学模型;(2)系统参数变化,而且存在外界扰动,造成理想模型的最优控制失去最优性。
2、内模控制概念(Internal Model Conter,IMC)
一种基于过程数学模型进行控制器设计的新型控制策略。
3、内模控制原理
典型的内模控制结构如图1所示,其中,为控制器,
为过程模型,
为被控过程,
为扰动对于输出的影响,
为参考输入,
为输出值。

图1 内模控制原理结构
控制目标:输出逼近参考值(设定值)
。
将图1进行等效变化,结果如图2所示,其中虚线框为反馈控制器。
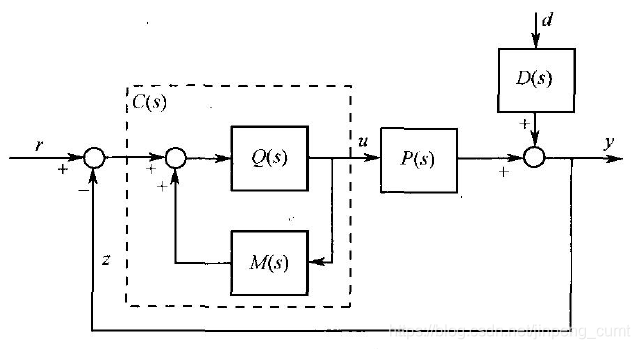
图2 等效反馈控制系统结构
则
(1)
将参考信号和扰动信号都看作输入,则系统输入/输出关系如下:
(2)
(3)
将式(1)代入式(2)和式(3)中,整理得:
(4)
(5)
则,系统闭环响应为:
(6)
其中,反馈信号为
(7)
当模型精确,即,且
,则:
说明模型输出与过程输出相等,反馈信号为零。
在模型精确和无外界扰动输入的条件下,内模控制具有开环结构。这就清楚地表明,对开环稳定的过程而言,反馈的目的是克服过程的不确定性。也就是说,如果过程和过程输入都完全清楚,只需要前馈(开环)控制,而不需要反馈(闭环)控制。事实上,在工业过程控制中,克服扰动是控制系统的主要任务,而模型不确定性也是难免的。此时,图1所示的IMC结构中,反馈信号z就反映了过程模型的不确定性和扰动的影响,从而构成了闭环控制结构。
4、内模控制的性质
4.1 对偶稳定性
假设模型是精确的,即,则IMC系统内部稳定的充要条件为:过程
与控制器
都是稳定的。
4.2 理想控制器特性
当过程稳定,且模型精确,即
时,若设计控制器使之满足
(8)
同时,模型的逆存在且可实现,则由式(6)可得:
![]() (9)
(9)
式(9)表明,在所有时间内在任何干扰作用下,系统输出值都等于系统输入设定值。
注意:理想控制器特性是在存在且控制器
可以实现的条件下得到的。
