1、内容简介
略
342-可以交流、咨询、答疑
2、内容说明
通过使用传统的采用PI矢量控制策略[[]][[]]是无法抑制系统内由不平衡带来的二倍频交流脉动的。为此,本文提出了两种新的控制策略:辅助PR控制和主动PIR控制。
4.3.1 PR控制分析
PR控制器[[][]]是在传统PI控制器的基础上,由R环节代替I环节[]。对于PR控制器的开环传递函数如下面公式(4-7)所示:
(4-7)
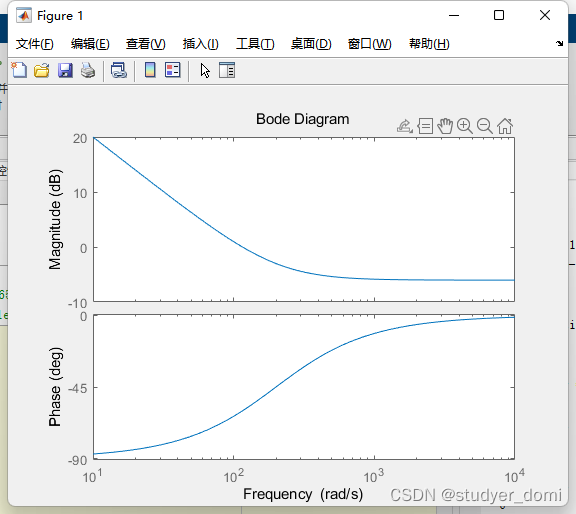
公式(4-7)中:是比例环节增益,是谐振环节增益,是谐振环节的谐振频率,因为谐振控制器需要抑制二倍频的交流分量,所以取谐振设为电网频率的2倍,即:。根据公式(4-7),进一步绘制PR控制器的Bode图[[]]。
图4-5 PR开环Bode图
由上面图(4-5)分析,对于PR控制器在角频率附近对应的幅值增益远远大于其他频率处的幅值增益。也就意味着,当控制器输入的偏差信号的角频率是时,采用PR控制器的负反馈闭环系统可以跟踪抑制该交流信号。
4.3.2 PIR控制分析
是基于PI控制器环节的基础上,PIR控制器增加一个R环节。PIR控制器的开环传递函数如下式(8)所示:
(4-8)
公式(4-8)中:是比例环节增益,是积分环节增益,是谐振环节增益,是谐振环节的谐振频率,因为谐振控制器设计目的是抑制二倍频的交流分量,所以取谐振设为电网电压频率的2倍,即:。
根据公式(4-8),得到PIR控制下的开环Bode图,如下图所示。下图中同时绘制了PI控制器的Bode图 [18]以供比较。
图4-6 PIR和PI开环Bode图
由上面图4-6可知,在低频段,PIR和PI开环增益相似,R环节不起作用,即在三相电网电压平衡时,在同步2RC内,只存在直流分量,PIR可以像PI控制器一样,使得系统输出跟踪设定值;当输入的偏差信号的角频率在二倍频处,PIR中谐振环节发挥主要作用,有较大的开环增益。
3、仿真分析
p = 0.5; % p
Ti = 0.01; % i
Kr = 5000; % 谐振环节增益
w0 = 100*2*pi; % 谐振点角频率
pi = tf([p*Ti 1],[Ti 0])
R_controller = tf([Kr 0],[1 0 w0^2])
sys_controller = series(pi,R_controller)
figure
bode(pi)
hold on
bode(sys_controller)

4、参考论文
基于PIR调节器并网逆变器电流谐波抑制策略_刘孟伟