轮廓图像与 Canny 图像的区别
一个轮廓一般对应一系列的点,也就是图像中的一条曲线。轮廓图像和 Canny 图像乍看起来表现几乎是一致的,但其实组成两者的数据结构差别很大:
-
Canny 边缘图像是一个点的集合,点与点之间没有联系。
-
轮廓图像是一个点集的集合,每个点集(即轮廓)内的点都是相邻的,点集与点集之间也存在前后、父内等关系。
寻找轮廓:findContours 函数
findContours 函数用于在二值图像中寻找轮廓。
void findContours(InputArray image, OutputArrays contours, OutputArray hierarchy, int mode, int method, Point offset = Point());
- image,输入图像,即源图像,填 Mat 类的对象即可,可以是灰度图(非零像素被视为 1),但更常用的是二值图像,一般是经过Canny、拉普拉斯等边缘检测算子处理过的二值图像。
- contours,检测到的所有轮廓均会被存在这里。每个轮廓为一个点集,用 Point 类型的 vector 表示。所以会被定义为
vector<vector<Point> > contours
- hierarchy,每个轮廓 contours[i] 对应四个 hierarchy[i][0] ~ hierarchy[i][3],分别表示与当前轮廓平级的后一个轮廓的的索引编号、与当前轮廓平级的前一个轮廓的索引编号、当前轮廓的子轮廓的索引编号、当前轮廓的父轮廓的索引编号。如果没有对应项,hierarchy[i][x] = -1。
- mode,轮廓检索模式,取值如下:
| 标识符 | 含义 |
| RETR_EXTERNAL | 只检测最外层轮廓,包含在外围轮廓内的内围轮廓被忽略。不存在父轮廓或内嵌轮廓 (hierarchy[i][2] = hierarchy[i][3] = -1)。
|
| RETR_LIST | 提取所有轮廓,并且放置在 list 中。不存在父轮廓或内嵌轮廓 (hierarchy[i][2] = hierarchy[i][3] = -1)。
|
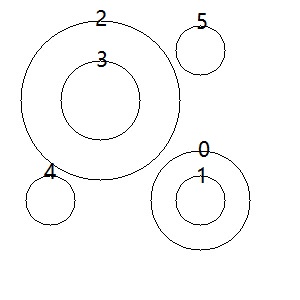
| RETR_CCOMP | 提取所有轮廓,无论嵌套个数多少,都将其组织为双层结构(外层、内层)。
|
| RETR_TREE | 提取所有轮廓,并建立网状的轮廓结构(最外层轮廓为根)。
|
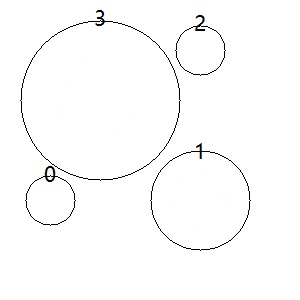
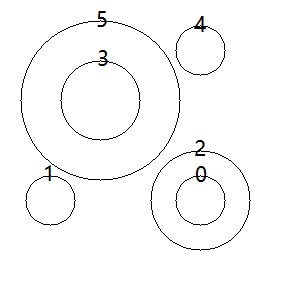 再举个例子:
再举个例子: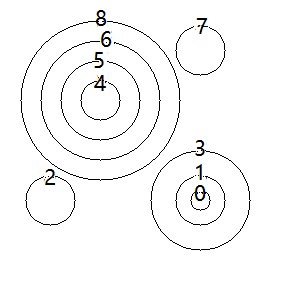
 再举个例子:
再举个例子:
 再举个例子:
再举个例子: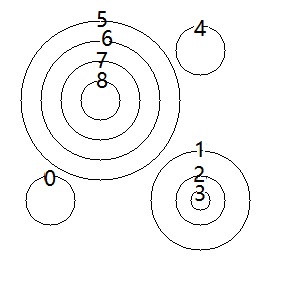
- method,轮廓的近似办法,取值如下:
| 标识符 | 含义 |
| CHAIN_APPROX_NONE | 获取每个轮廓的每个像素,相邻的两个像素位差不超过 1 像素。 |
| CHAIN_APPROX_SIMPLE | 仅保存轮廓的拐点信息,拐点与拐点之间直线段上的信息点不予保留。例如一个矩形轮廓只需 4 个点来保留轮廓信息。 |
| CHAIN_APPROX_TC89_L1 CHAIN_APPROX_TC89_KCOS |
使用 teh-Chinl chain 近似算法。 |
- offset,所有的轮廓信息相对于原始图像对应点的偏移量,相当于在每一个检测出的轮廓点上加上该偏移量,有默认值 Point() 。对 ROI 区域(感兴趣区域)中找出的轮廓,并要在整个图像中进行分析时,这个参数便可派上用场。
绘制轮廓:drawContours 函数
void drawContours(InputOutputArray image, InputOutputArrays contours, int contourIdx, const Scalar& color, int thickness = 1, int lineType = 8, InputArray hierarchy = noArray(), int maxLevel = INT_MAX, Point offset = Point());
- image,目标图像,填 Mat 类对象即可。
- contours,输入的轮廓,每个轮廓都是一组点集,可用 Point 类型的 vector 表示。
- contourIdx,轮廓的索引编号。若为负值,则绘制所有轮廓。
- color,轮廓颜色。
- thickness,轮廓线条的粗细程度,有默认值 1。若其为负值,便会填充轮廓内部空间。
- lineType,线条的类型,有默认值 8。可去类型如下:
| 类型 | 含义 |
| 8 | 8 连通线型 |
| 4 | 4 连通线型 |
| LINE_AA | 抗锯齿线型 |
- hierarchy,可选的层次结构信息,有默认值 noArray()。
- maxLevel,用于绘制轮廓的最大等级,有默认值 INT_MAX。
- offset,轮廓信息相对于目标图像对应点的偏移量,相当于在每一个轮廓点上加上该偏移量,有默认值 Point() 。在 ROI 区域(感兴趣区域)绘制轮廓时,这个参数便可派上用场。
代码示例:
#include<opencv.hpp>
#include<iostream>
#include<vector>
using namespace std;
using namespace cv;
int main() {
Mat src = imread("C:/Users/齐明洋/Desktop/3.jpg");
imshow("src", src);
Mat canny_img;
Canny(src, canny_img, 55, 110, 3);
//闭操作,先膨胀后腐蚀,可消除小黑点
Mat kernel = getStructuringElement(MORPH_RECT, Size(3, 3));
morphologyEx(canny_img, canny_img, MORPH_CLOSE, kernel);
imshow("canny_img", canny_img);
Mat dst = Mat(src.rows, src.cols, CV_8UC3, Scalar(0, 0, 0));
vector<vector<Point> >contours;
////写法一
//vector<Vec4i>hierarchy;
//findContours(canny_img, contours,hierarchy, RETR_TREE, CHAIN_APPROX_NONE);
//for (int i = 0; i < contours.size(); i++) {
// drawContours(dst, contours, i, Scalar(0, 0, 255), 1, 8, hierarchy);
//}
//写法二
findContours(canny_img, contours, RETR_TREE, CHAIN_APPROX_NONE);
drawContours(dst, contours, -1, Scalar(0, 255, 0), 1);
imshow("dst", dst);
waitKey(0);
}
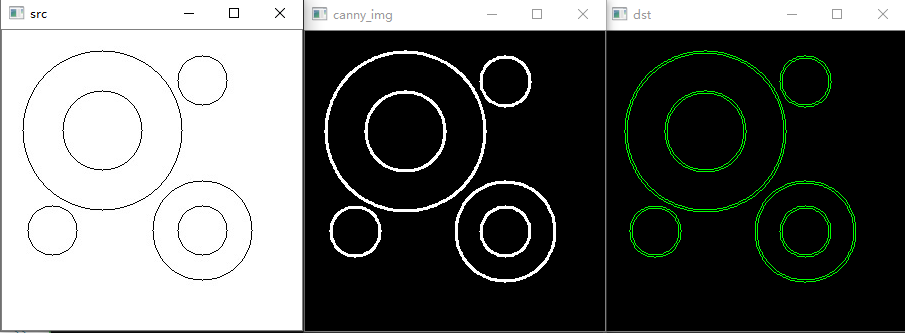
效果演示: