萌芽期:
1.中国春秋战国时期
都江堰(体现了自控的系统观念)
 2.中东九世纪
2.中东九世纪
水钟
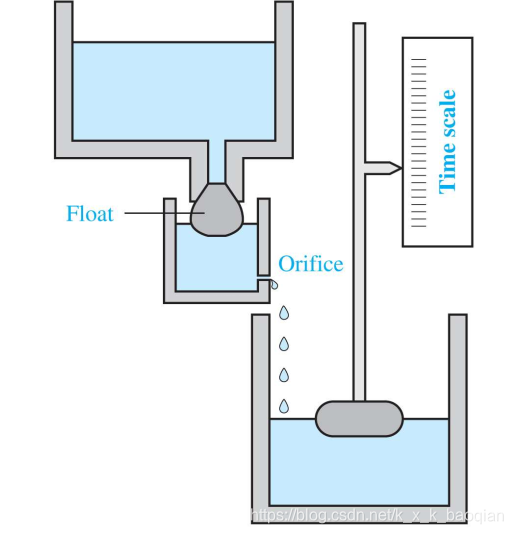
3.中国元代1319
铜壶滴漏
 4.1765年,俄国发明蒸汽锅炉的水位自控装置,俄国人认为是世界上第一个自动调节器
4.1765年,俄国发明蒸汽锅炉的水位自控装置,俄国人认为是世界上第一个自动调节器
5.1788年,英国watt发明离心式飞球调速器,控制温度,西方世界认为是最早的自动反馈控制器
解释:engine转动速度快时,转轮转速快,转轮引动套在杆子上的一对飞球转速增加,
离心力变大,把滑套带动上移,再按照杠杆原理,控制使得阀门关小,engine速度下降
watte发明了上面说的这个离心飞球调速器之后,在使用中发现:
无法控制速度稳定,速度存在波动
Maxwell研究这个问题,通过力学原理,研究了调速器-蒸汽机-负荷系统 的常微分方程
之后通过在工作点附近近似的线性常微分方程模型,证明了二阶,三阶系统闭环稳定的条件
1868 发表《论调节器》On Governors
1875 英国剑桥大学的Routh建立了Routh稳定判据,讲当时各种关于稳定性的独立的结论统一起来
1895 瑞典的Hurwitz在解决工程调速系统问题时,提出了根据代数方程系数判别稳定性的方法,完成第一个应用自动控制原理,稳定性原理设计的控制系统
这两个本质上是一样的,所以我们称之为Routh-Hurwitz Stability Criteria
1892年,俄国的Lyaponov提出了李亚普诺夫方法,不仅可以用在线性的情况下,同时可以用在非线性的设计和分析
1910年,美国Sperry创立公司,在一战二战为美方提供陀螺仪
1914年,Sperry的儿子小Sperry在巴黎航展中,演示了陀螺仪全自动机身平衡和稳定,开创了仪表导航的时代
1922年,Minorsky研制出船舶自动驾驶伺服机构,提出PID
1925年,Sperry和Mason研制出火炮控制器
1929年,Sperry和Mason研制出气压反馈控制器
1927年,Black提出了负反馈放大器Negative feedback
1938年,Bode
1940年,Nyquist 提出频率响应法
1934年,Hazen提出伺服机构理论
1939年,MIT建立伺服机构实验室
1938年,Shannon提出继电器逻辑自动化理论
1948,发表通讯的数学理论,奠定信息论基础
1942,Talor仪表公司的Ziegler和Nichols提出PID临界比例带法
1942,MIT的Wiener提出维纳滤波
1948,发表控制论一书,控制论诞生
1948,Evans提出根轨迹法,以单输入单输出线性系统为对象的经典控制理论研究工作完成
