文档下载链接:https://download.csdn.net/download/OEMT_301/12069538
https://download.csdn.net/download/OEMT_301/12104738
粒子滤波算法是一种非线性的滤波方法。
其大致思路如下(这里以图像目标(人)跟踪为例):
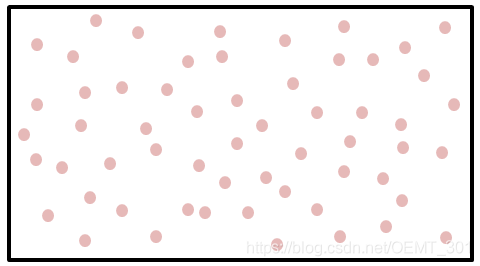
1、 首先在整个图像中随机初始化一些粒子点,并对每个粒子点分配权值
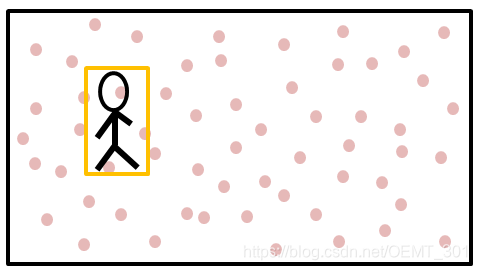
2、 在视频中框出待跟踪目标
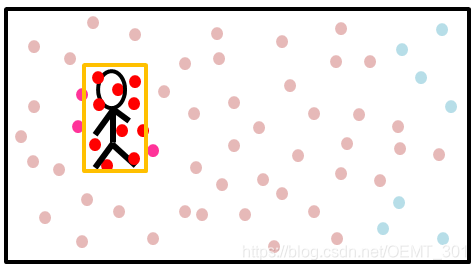
3、 更新权值,增加靠近框出的目标粒子权值
4、 根据状态转移矩阵和测量数据,对粒子权重,对粒子进行重采样
粒子滤波示过程示意图
初始化图像粒子点和权重
框出待跟踪目标
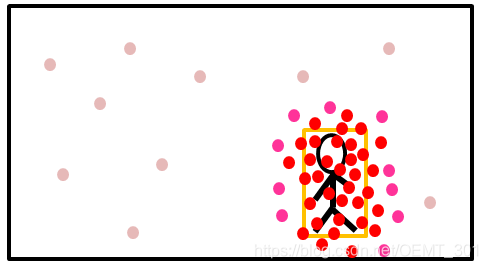
更新权重,其中权重较小的直接舍弃,权值较大的粒子点进行复制,权值越大复制的粒子点越多。
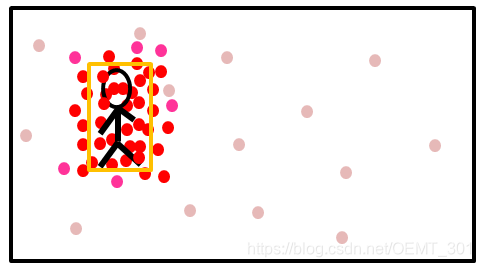
经过几次权值更新,可以使得大多数粒子点处于目标框附近
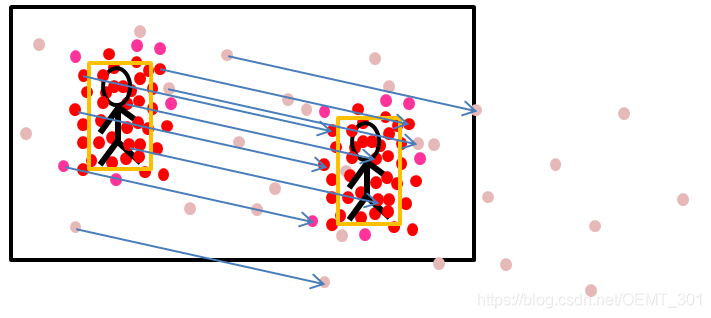
根据状态转移矩阵获取新粒子点坐标(箭头相当于状态转移矩阵)
A、经过目标移动后,理想状态为如下图
B、但实际上存在一些噪声,预测结果与实际结果有偏差
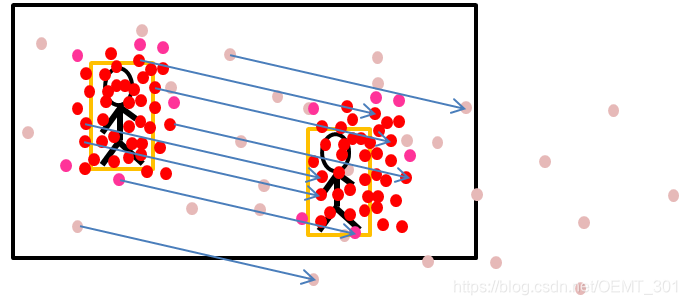
因此继续重采样,利用测量结果对其进行重采样,便可得到较为准确的跟踪效果
以上为粒子滤波过程示意图
重采样

MATLAB重采样代码示意
function w_new=resample_particles(w)
w_new=w;
Neff=1/sum(w.*w);
N=length(w);
if Neff<75 %75为预先设定阈值
for i = 1 : N
u = rand;
qtempsum = 0;
for j = 1 : N
qtempsum = qtempsum + w(j);
if qtempsum >= u
w_new(i)=w(j);
break;
end
end
end
end
一维SIR粒子滤波实例
%% initialize the variables
x = 0.1; % initial actual state
x_N = 1; % 系统过程噪声的协方差 (由于是一维的,这里就是方差)
x_R = 1; % 测量的协方差
T = 75; % 共进行75次
N = 100; % 粒子数,越大效果越好,计算量也越大
%initilize our initial, prior particle distribution as a gaussian around
%the true initial value
V = 2; %初始分布的方差
x_P = []; % 粒子
% 用一个高斯分布随机的产生初始的粒子
for i = 1:N
x_P(i) = x + sqrt(V) * randn;
end
z_out = [x^2 / 20 + sqrt(x_R) * randn]; %实际测量值
x_out = [x]; %the actual output vector for measurement values.
x_est = [x]; % time by time output of the particle filters estimate
x_est_out = [x_est]; % the vector of particle filter estimates.
for t = 1:T
x = 0.5*x + 25*x/(1 + x^2) + 8*cos(1.2*(t-1)) + sqrt(x_N)*randn;
z = x^2/20 + sqrt(x_R)*randn;
for i = 1:N
%从先验p(x(k)|x(k-1))中采样
x_P_update(i) = 0.5*x_P(i) + 25*x_P(i)/(1 + x_P(i)^2) + 8*cos(1.2*(t-1)) + sqrt(x_N)*randn;
%计算采样粒子的值,为后面根据似然去计算权重做铺垫
z_update(i) = x_P_update(i)^2/20;
%对每个粒子计算其权重,这里假设量测噪声是高斯分布。所以 w = p(y|x)对应下面的计算公式
P_w(i) = (1/sqrt(2*pi*x_R)) * exp(-(z - z_update(i))^2/(2*x_R));
end
% 归一化.
P_w = P_w./sum(P_w);
%% Resampling
%这里没有用博客里之前说的histc函数,不过目的和效果是一样的
for i = 1 : N
x_P(i) = x_P_update(find(rand <= cumsum(P_w),1)); % 粒子权重大的将多得到后代
end % find( ,1) 返回第一个 符合前面条件的数的 下标
%状态估计,重采样以后,每个粒子的权重都变成了1/N
x_est = mean(x_P);
% Save data in arrays for later plotting
x_out = [x_out x];
z_out = [z_out z];
x_est_out = [x_est_out x_est];
end
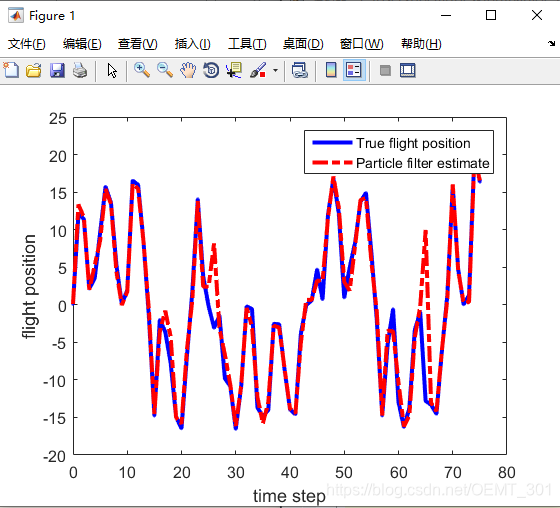
t = 0:T;
figure(1);
clf
plot(t, x_out, '.-b', t, x_est_out, '-.r','linewidth',3);
set(gca,'FontSize',12); set(gcf,'Color','White');
xlabel('time step'); ylabel('flight position');
legend('True flight position', 'Particle filter estimate');
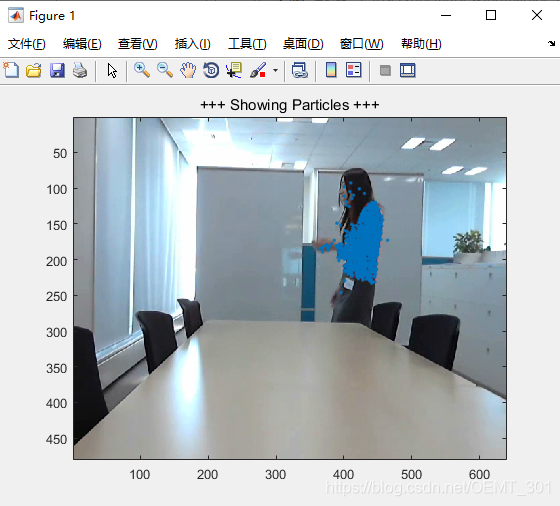
图像粒子跟踪实例
main.m
% Parameters
F_update = [1 0 1 0; 0 1 0 1; 0 0 1 0; 0 0 0 1]; % 状态转移矩阵
Npop_particles = 4000;
Xstd_rgb = 50; % 方差
Xstd_pos = 25; % 位置倍率
Xstd_vec = 5; % 速度倍率
Xrgb_trgt = [255; 0; 0]; % 检测颜色
% Loading Movie
vr = VideoReader('Person.wmv');
Npix_resolution = [vr.Width vr.Height];
Nfrm_movie = floor(vr.Duration * vr.FrameRate);
% Object Tracking by Particle Filter
X = create_particles(Npix_resolution, Npop_particles); % 粒子初始化,在画面中产生均匀分布的随机粒子
for k = 1:Nfrm_movie
% Getting Image
Y_k = read(vr, k);
% Forecasting
%通过状态模型预测 这里采用的是在上一时刻基础上叠加噪声
X = update_particles(F_update, Xstd_pos, Xstd_vec, X);
% Calculating Log Likelihood
L = calc_log_likelihood(Xstd_rgb, Xrgb_trgt, X(1:2, :), Y_k);
% Resampling
X = resample_particles(X, L);
% Showing Image
show_particles(X, Y_k);
% show_state_estimated(X, Y_k);
end
create_particles.m
function X = create_particles(Npix_resolution, Npop_particles)
X1 = randi(Npix_resolution(2), 1, Npop_particles); % 产生一个 1 x Npop_particles 的行向量,各元素值为 1:Npix_resolution(2)之间的产生的均匀分布的随机整数
X2 = randi(Npix_resolution(1), 1, Npop_particles);
X3 = zeros(2, Npop_particles);
X = [X1; X2; X3];
update_particles.m
function X = update_particles(F_update, Xstd_pos, Xstd_vec, X)
% X 所有粒子组成的矩阵
% X(1:2, :) 各粒子在画面中的位置
N = size(X, 2);
X = F_update * X; % 状态转移矩阵
X(1:2,:) = X(1:2,:) + Xstd_pos * randn(2, N);
X(3:4,:) = X(3:4,:) + Xstd_vec * randn(2, N);
calc_log_likelihood.m

function L = calc_log_likelihood(Xstd_rgb, Xrgb_trgt, X, Y) %#codegen
Npix_h = size(Y, 1);
Npix_w = size(Y, 2);
N = size(X,2);
L = zeros(1,N);
Y = permute(Y, [3 1 2]); %重新安排矩阵
% 高斯函数
A = -log(sqrt(2 * pi) * Xstd_rgb);
B = - 0.5 / (Xstd_rgb.^2);
X = round(X);
for k = 1:N
% m,n 粒子k在画面中的位置
m = X(1,k);
n = X(2,k);
% 越界判断
I = (m >= 1 & m <= Npix_h);
J = (n >= 1 & n <= Npix_w);
if I && J
C = double(Y(:, m, n));
D = C - Xrgb_trgt;
D2 = D' * D; % 欧氏距离
L(k) = A + B * D2; %高斯似然 D2 越小 L越大 注意B为负数
else
L(k) = -Inf;
end
end
resample_particles.m
function X = resample_particles(X, L_log)
% Calculating Cumulative Distribution
L = exp(L_log - max(L_log));
Q = L / sum(L, 2); % a = sum(L,2) a中元素为各行向量累加值
R = cumsum(Q, 2); % 权值累加
% Generating Random Numbers
N = size(X, 2);
T = rand(1, N); % 随机阈值
% Resampling
X_temp = zeros(size(X));
%这里没有用博客里之前说的histc函数,不过目的和效果是一样的
for i = 1 : N
X_temp(:,i) = X(:,find(T(i) <= R,1)); % 粒子权重大的将多得到后代
end % find( ,1) 返回第一个 符合前面条件的数的 下标
X = X_temp;
% [~, I] = histc(T, R);
% X = X(:, I + 1);
C++代码:
#include <opencv2/opencv.hpp>
#include <stdio.h>
#include <stdlib.h>
#include <math.h>
#include <ctime>
#include <fstream>
#include <iostream>
#include <assert.h>
using namespace cv;
using namespace std;
//****************************定义粒子数目**********************************//
#define PARTICLE_NUMBER 300
#define HIST_SIZE 16
//*******************************定义粒子结构体类型************************//
typedef struct particle//关于typedef struct和struct见下文补充
{
int orix, oriy; //原始粒子坐标
int x, y; //当前粒子的坐标
double scale; //当前粒子窗口的尺寸
int prex, prey; //上一帧粒子的坐标
double prescale; //上一帧粒子窗口的尺寸
Rect rect; //当前粒子矩形窗口
double weight; //当前粒子权值
}PARTICLE;
bool leftButtonDownFlag=false; //左键单击后的标志位
bool leftButtonUpFlag=false; //左键单击后松开的标志位
Point Point_s; //矩形框起点
Point Point_e; //矩形框鼠标左键弹起来的终点
Point processPoint; //矩形框移动的终点
bool tracking = false;
//****有关粒子窗口变化用到的相关变量****// 目标运行预测值
int A1 = 2;
int A2 = -1;
int B0 = 1;
double sigmax = 1.0;
double sigmay = 0.5;
double sigmas = 0.001;
double *m_hist, *hist;
int p_num = 0;
vector<PARTICLE> newParticle;//定义一个新的粒子数组
/****粒子权重值的降序排列****/
// 排序法则,其中:< 升序 >降序
bool comparison(PARTICLE p1,PARTICLE p2)
{
return p1.weight > p2.weight ;
}
void onMouse( int event, int x, int y, int flags, void *param )
{
if(event==CV_EVENT_LBUTTONDOWN)
{
tracking = false;
leftButtonDownFlag = true; //标志位
leftButtonUpFlag = false;
processPoint=Point(x,y); //设置左键按下点的矩形起点
Point_s=processPoint;
}
else if(event == CV_EVENT_MOUSEMOVE && leftButtonDownFlag)
{
processPoint=Point(x,y);
}
else if(event==CV_EVENT_LBUTTONUP && leftButtonDownFlag)
{
leftButtonDownFlag=false;
processPoint=Point(x,y);
Point_e=processPoint;
leftButtonUpFlag = true;
tracking = true;
}
}
void init_target(Mat mould, vector<PARTICLE> &particles, Rect &rect)
{
int q_r, q_g, q_b, q_temp;
particles.clear();
//初始化权值矩阵和目标直方图
for (int i=0;i<HIST_SIZE * HIST_SIZE * HIST_SIZE;i++)
{
m_hist[i] = 0.0;
}
//计算目标权值直方
for (int i = 0;i < mould.rows; i++)
{
for (int j = 0;j < mould.cols; j++)
{
//rgb颜色空间量化为16*16*16 bins
q_r = mould.at<Vec3b>(i, j)[2]/255/HIST_SIZE;
q_g = mould.at<Vec3b>(i, j)[1]/255/HIST_SIZE;
q_b = mould.at<Vec3b>(i, j)[0]/255/HIST_SIZE;
q_temp = q_r * HIST_SIZE * HIST_SIZE + q_g * HIST_SIZE + q_b;
m_hist[q_temp]++; // 颜色权重直方图
}
}
// 归一化
double m_hist_sum = 0.0;
for (int i=0;i<HIST_SIZE * HIST_SIZE * HIST_SIZE;i++)
{
m_hist_sum += pow(m_hist[i], 2);
}
m_hist_sum = sqrt(m_hist_sum);
for (int i=0;i<HIST_SIZE * HIST_SIZE * HIST_SIZE;i++)
{
m_hist[i] = m_hist[i]/m_hist_sum;
}
// 目标粒子初始化
PARTICLE pParticle;
for (int k=0; k<PARTICLE_NUMBER; k++) //对于每个粒子
{
pParticle.x = cvRound(rect.x + 0.5*rect.width);//当前粒子的x坐标
pParticle.y = cvRound(rect.y + 0.5*rect.height);//当前粒子的y坐标
//粒子的原始坐标为选定矩形框(即目标)的中心
pParticle.orix = pParticle.x;
pParticle.oriy = pParticle.y;
//当前粒子窗口的尺寸
pParticle.scale = 1;//初始化为1,然后后面粒子到搜索的时候才通过计算更新
//更新上一帧粒子的坐标
pParticle.prex = pParticle.x;
pParticle.prey = pParticle.y;
//上一帧粒子窗口的尺寸
pParticle.prescale = 1;
//当前粒子矩形窗口
pParticle.rect = rect;
//当前粒子权值
pParticle.weight = 0;//权重初始为0
particles.push_back(pParticle);
}
}
void My_Tracking(Mat img, vector<PARTICLE> &particles)
{
int xpre, ypre;
double prescale, scale;
int x, y;
double sum = 0.0;
RNG rng; //随机数产生器
int q_r, q_g, q_b, q_temp;
/*计算粒子区域的直方图*/
//初始化目标直方图
for (int i=0;i<HIST_SIZE * HIST_SIZE * HIST_SIZE;i++)
{
hist[i] = 0.0;
}
for (int k=0; k<PARTICLE_NUMBER; k++)
{
//当前粒子的坐标
xpre = particles.at(k).x;
ypre = particles.at(k).y;
//当前粒子窗口的尺寸
prescale = particles.at(k).scale;
/*更新跟踪矩形框中心,即粒子中心*///使用二阶动态回归来自动更新粒子状态
x = cvRound(A1*(particles.at(k).x - particles.at(k).orix) + A2*(particles.at(k).prex - particles.at(k).orix) +
B0*rng.gaussian(sigmax) + particles.at(k).orix);
particles.at(k).x = max(0, min(x, img.cols - 1));
y = cvRound(A1*(particles.at(k).y - particles.at(k).oriy) + A2*(particles.at(k).prey - particles.at(k).oriy) +
B0*rng.gaussian(sigmay) + particles.at(k).oriy);
particles.at(k).y = max(0, min(y, img.rows - 1));
scale = A1*(particles.at(k).scale - 1) + A2*(particles.at(k).prescale - 1) + B0*(rng.gaussian(sigmas)) + 1.0;
particles.at(k).scale = max(1.0, min(scale, 3.0));//此处参数设置存疑
particles.at(k).prex = xpre;
particles.at(k).prey = ypre;
particles.at(k).prescale = prescale;
/*计算更新得到矩形框数据*/
particles.at(k).rect.x = max(0, min(cvRound(particles.at(k).x - 0.5*particles.at(k).scale*particles.at(k).rect.width), img.cols));
particles.at(k).rect.y = max(0, min(cvRound(particles.at(k).y - 0.5*particles.at(k).scale*particles.at(k).rect.height), img.rows));
particles.at(k).rect.width = min(cvRound(particles.at(k).rect.width), img.cols - particles.at(k).rect.x);
particles.at(k).rect.height = min(cvRound(particles.at(k).rect.height), img.rows - particles.at(k).rect.y);
//计算粒子权值直方图
for (int i = particles.at(k).rect.y; i < particles.at(k).rect.y + particles.at(k).rect.height; i++)
{
for (int j = particles.at(k).rect.x; j < particles.at(k).rect.x + particles.at(k).rect.width; j++)
{
//rgb颜色空间量化为16*16*16 bins
q_r = img.at<Vec3b>(i, j)[2]/255/HIST_SIZE;
q_g = img.at<Vec3b>(i, j)[1]/255/HIST_SIZE;
q_b = img.at<Vec3b>(i, j)[0]/255/HIST_SIZE;
q_temp = q_r * HIST_SIZE * HIST_SIZE + q_g * HIST_SIZE + q_b;
hist[q_temp]++; // 颜色权重直方图
}
}
// 直方图归一化
double hist_sum = 0.0;
double sim_sum = 0.0;
for (int i=0;i<HIST_SIZE * HIST_SIZE * HIST_SIZE;i++)
{
hist_sum += pow(hist[i], 2);
}
hist_sum = sqrt(hist_sum);
for (int i=0;i<HIST_SIZE * HIST_SIZE * HIST_SIZE;i++)
{
hist[i] = hist[i]/hist_sum;
if(m_hist[i] > 0.0 && hist[i] > 0.0)
{
sim_sum += sqrt(m_hist[i]*hist[i]); // 计算巴氏距离
}
}
particles.at(k).weight = sim_sum;
/*粒子权重累加*/
sum += particles.at(k).weight;
}
// 赋值每个粒子权重
for (int k=0; k<PARTICLE_NUMBER; k++)
{
particles.at(k).weight /= sum;
}
sort(particles.begin(), particles.end(), comparison); // 权重排序
//*********************重采样,根据粒子权重重采样********************//
int T = 0; // 阈值,只要T个粒子
bool flag = false; // 是否对每个粒子重新赋值跳出标志位
newParticle.clear();
for (int k = 0;k < PARTICLE_NUMBER;k++)
{
if(flag) // 完成粒子赋值,跳出循环
{
break;
}
T = cvRound(particles.at(k).weight*PARTICLE_NUMBER); //将权重较弱的粒子淘汰掉,保留权重在阈值以上的
if(T > 0)
{
for (int i = 0;i < T;i++) // 权重越大,该点赋值数越多
{
newParticle.push_back(particles.at(k));
if (newParticle.size() >= PARTICLE_NUMBER)
{
flag = true;
break;
}
}
}
else // 没有可以满足条件的权值,跳出循环
{
break;
}
}
if(!flag) // 点未全部赋值,将剩下的用最大值进行赋值
{
while (newParticle.size() < PARTICLE_NUMBER)
{
newParticle.push_back(particles.at(0));//复制大的权值的样本填满空间
}
}
// 将粒子点替换为更新后的粒子点
for (int k = 0;k < PARTICLE_NUMBER;k++)
{
particles.at(k) = newParticle.at(k);
}
//***********计算最大权重目标的期望位置,采用权值最大的1/4个粒子数作为跟踪结果************//
Rect rectTracking; //初始化一个Rect作为跟踪的临时
double weight_temp = 0.0;
for (int k = 0; k<PARTICLE_NUMBER / 4; k++)
{
weight_temp += particles.at(k).weight;
}
for (int k = 0; k<PARTICLE_NUMBER / 4; k++)
{
particles.at(k).weight /= weight_temp;
}
// 更新检测框
for (int k = 0; k<PARTICLE_NUMBER / 4; k++)
{
rectTracking.x += particles.at(k).rect.x*particles.at(k).weight;
rectTracking.y += particles.at(k).rect.y*particles.at(k).weight;
rectTracking.width += particles.at(k).rect.width*particles.at(k).weight;
rectTracking.height += particles.at(k).rect.height*particles.at(k).weight;
}
rectangle(img, rectTracking, Scalar(0, 255, 0), 3, 8, 0);//显示跟踪结果,框出
}
int main()
{
Mat img_mould, frame, mould;
Rect rect;
vector<PARTICLE> particles; // 粒子参数
//打开摄像头或者特定视频
VideoCapture cap;
cap.open(0);//或cap.open("文件名")
//读入视频是否为空
if (!cap.isOpened())
{
return -1;
}
namedWindow("输出视频", 1);
setMouseCallback("输出视频", onMouse, 0);//鼠标回调函数,响应鼠标以选择跟踪区域
m_hist = (double *)malloc(sizeof(double)*HIST_SIZE * HIST_SIZE * HIST_SIZE); // 目标直方图
hist = (double *)malloc(sizeof(double)*HIST_SIZE * HIST_SIZE * HIST_SIZE); // 目标直方图
while(1)
{
cap >> frame;
if (frame.empty())
{
return -1;
}
blur(frame, frame, Size(2, 2));//先对原图进行均值滤波处理
if(tracking && leftButtonUpFlag)
{
leftButtonUpFlag = false;
rect.x = Point_s.x;
rect.y = Point_s.y;
rect.width = Point_e.x - Point_s.x;
rect.height = Point_e.y - Point_s.y;
img_mould = frame.clone();
mould = Mat(img_mould, rect); //目标图像
init_target(mould, particles, rect);
p_num = 0;
}
if(leftButtonDownFlag) // 绘制截取目标窗口
{
rect.x = Point_s.x;
rect.y = Point_s.y;
rect.width = processPoint.x - Point_s.x;
rect.height = processPoint.y - Point_s.y;
rectangle(frame, rect, Scalar(0, 255, 0), 3, 8, 0);
}
if(tracking)
{
My_Tracking(frame, particles);
cout << p_num++ << endl; // 输出检测帧数
}
imshow("输出视频", frame);
waitKey(1);
}
return 0;
}
注:C++代码是直接调动摄像头,效率比较低,识别准确率也有待提高,以后有时间了再优化。
自我感觉自己理解可能有误,请谨慎参考
参考:
http://blog.csdn.net/heyijia0327/article/details/40899819
https://blog.csdn.net/u011624019/article/details/80559397
